 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeINSPIRE-GNN: Intelligent Sensor Placement to Improve Sparse Bicycling Network Prediction via Reinforcement Learning Boosted Graph Neural Networks
Jul 31, 2025Accurate link-level bicycling volume estimation is essential for sustainable urban transportation planning. However, many cities face significant challenges of high data sparsity due to limited bicycling count sensor coverage. To address this issue, we propose INSPIRE-GNN, a novel Reinforcement Learning (RL)-boosted hybrid Graph Neural Network (GNN) framework designed to optimize sensor placement and improve link-level bicycling volume estimation in data-sparse environments. INSPIRE-GNN integrates Graph Convolutional Networks (GCN) and Graph Attention Networks (GAT) with a Deep Q-Network (DQN)-based RL agent, enabling a data-driven strategic selection of sensor locations to maximize estimation performance. Applied to Melbourne's bicycling network, comprising 15,933 road segments with sensor coverage on only 141 road segments (99% sparsity) - INSPIRE-GNN demonstrates significant improvements in volume estimation by strategically selecting additional sensor locations in deployments of 50, 100, 200 and 500 sensors. Our framework outperforms traditional heuristic methods for sensor placement such as betweenness centrality, closeness centrality, observed bicycling activity and random placement, across key metrics such as Mean Squared Error (MSE), Root Mean Squared Error (RMSE) and Mean Absolute Error (MAE). Furthermore, our experiments benchmark INSPIRE-GNN against standard machine learning and deep learning models in the bicycle volume estimation performance, underscoring its effectiveness. Our proposed framework provides transport planners actionable insights to effectively expand sensor networks, optimize sensor placement and maximize volume estimation accuracy and reliability of bicycling data for informed transportation planning decisions.
Classifying Bicycle Infrastructure Using On-Bike Street-Level Images
Oct 24, 2024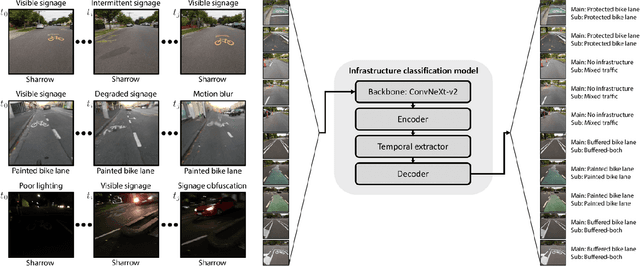
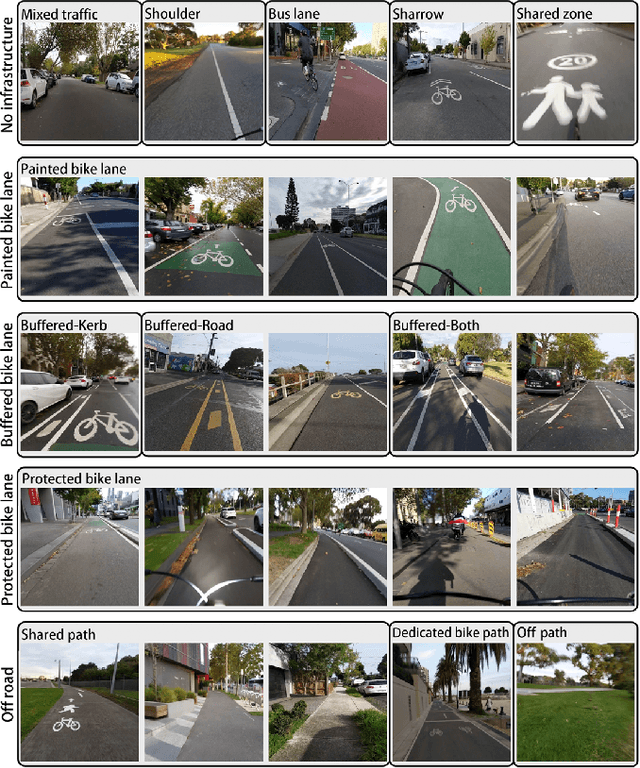

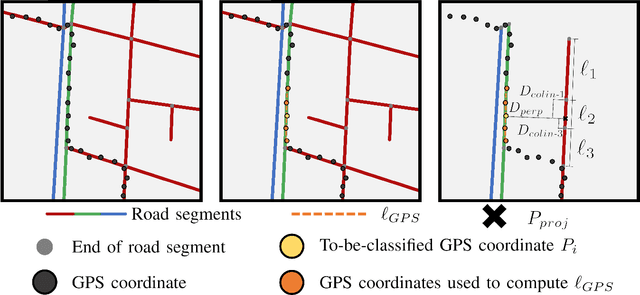
While cycling offers an attractive option for sustainable transportation, many potential cyclists are discouraged from taking up cycling due to the lack of suitable and safe infrastructure. Efficiently mapping cycling infrastructure across entire cities is necessary to advance our understanding of how to provide connected networks of high-quality infrastructure. Therefore we propose a system capable of classifying available cycling infrastructure from on-bike smartphone camera data. The system receives an image sequence as input, temporally analyzing the sequence to account for sparsity of signage. The model outputs cycling infrastructure class labels defined by a hierarchical classification system. Data is collected via participant cyclists covering 7,006Km across the Greater Melbourne region that is automatically labeled via a GPS and OpenStreetMap database matching algorithm. The proposed model achieved an accuracy of 95.38%, an increase in performance of 7.55% compared to the non-temporal model. The model demonstrated robustness to extreme absence of image features where the model lost only 6.6% in accuracy after 90% of images being replaced with blank images. This work is the first to classify cycling infrastructure using only street-level imagery collected from bike-mounted mobile phone cameras, while demonstrating robustness to feature sparsity via long temporal sequence analysis.
Evaluating the effects of Data Sparsity on the Link-level Bicycling Volume Estimation: A Graph Convolutional Neural Network Approach
Oct 11, 2024



Accurate bicycling volume estimation is crucial for making informed decisions about future investments in bicycling infrastructure. Traditional link-level volume estimation models are effective for motorised traffic but face significant challenges when applied to the bicycling context because of sparse data and the intricate nature of bicycling mobility patterns. To the best of our knowledge, we present the first study to utilize a Graph Convolutional Network (GCN) architecture to model link-level bicycling volumes. We estimate the Annual Average Daily Bicycle (AADB) counts across the City of Melbourne, Australia using Strava Metro bicycling count data. To evaluate the effectiveness of the GCN model, we benchmark it against traditional machine learning models, such as linear regression, support vector machines, and random forest. Our results show that the GCN model performs better than these traditional models in predicting AADB counts, demonstrating its ability to capture the spatial dependencies inherent in bicycle traffic data. We further investigate how varying levels of data sparsity affect performance of the GCN architecture. The GCN architecture performs well and better up to 80% sparsity level, but its limitations become apparent as the data sparsity increases further, emphasizing the need for further research on handling extreme data sparsity in bicycling volume estimation. Our findings offer valuable insights for city planners aiming to improve bicycling infrastructure and promote sustainable transportation.
A Benchmark for Cycling Close Pass Near Miss Event Detection from Video Streams
Apr 24, 2023



Cycling is a healthy and sustainable mode of transport. However, interactions with motor vehicles remain a key barrier to increased cycling participation. The ability to detect potentially dangerous interactions from on-bike sensing could provide important information to riders and policy makers. Thus, automated detection of conflict between cyclists and drivers has attracted researchers from both computer vision and road safety communities. In this paper, we introduce a novel benchmark, called Cyc-CP, towards cycling close pass near miss event detection from video streams. We first divide this task into scene-level and instance-level problems. Scene-level detection asks an algorithm to predict whether there is a close pass near miss event in the input video clip. Instance-level detection aims to detect which vehicle in the scene gives rise to a close pass near miss. We propose two benchmark models based on deep learning techniques for these two problems. For training and testing those models, we construct a synthetic dataset and also collect a real-world dataset. Our models can achieve 88.13% and 84.60% accuracy on the real-world dataset, respectively. We envision this benchmark as a test-bed to accelerate cycling close pass near miss detection and facilitate interaction between the fields of road safety, intelligent transportation systems and artificial intelligence. Both the benchmark datasets and detection models will be available at https://github.com/SustainableMobility/cyc-cp to facilitate experimental reproducibility and encourage more in-depth research in the field.