 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Benchmark for Cycling Close Pass Near Miss Event Detection from Video Streams
Apr 24, 2023



Cycling is a healthy and sustainable mode of transport. However, interactions with motor vehicles remain a key barrier to increased cycling participation. The ability to detect potentially dangerous interactions from on-bike sensing could provide important information to riders and policy makers. Thus, automated detection of conflict between cyclists and drivers has attracted researchers from both computer vision and road safety communities. In this paper, we introduce a novel benchmark, called Cyc-CP, towards cycling close pass near miss event detection from video streams. We first divide this task into scene-level and instance-level problems. Scene-level detection asks an algorithm to predict whether there is a close pass near miss event in the input video clip. Instance-level detection aims to detect which vehicle in the scene gives rise to a close pass near miss. We propose two benchmark models based on deep learning techniques for these two problems. For training and testing those models, we construct a synthetic dataset and also collect a real-world dataset. Our models can achieve 88.13% and 84.60% accuracy on the real-world dataset, respectively. We envision this benchmark as a test-bed to accelerate cycling close pass near miss detection and facilitate interaction between the fields of road safety, intelligent transportation systems and artificial intelligence. Both the benchmark datasets and detection models will be available at https://github.com/SustainableMobility/cyc-cp to facilitate experimental reproducibility and encourage more in-depth research in the field.
HOB-CNN: Hallucination of Occluded Branches with a Convolutional Neural Network for 2D Fruit Trees
Jul 28, 2022
Orchard automation has attracted the attention of researchers recently due to the shortage of global labor force. To automate tasks in orchards such as pruning, thinning, and harvesting, a detailed understanding of the tree structure is required. However, occlusions from foliage and fruits can make it challenging to predict the position of occluded trunks and branches. This work proposes a regression-based deep learning model, Hallucination of Occluded Branch Convolutional Neural Network (HOB-CNN), for tree branch position prediction in varying occluded conditions. We formulate tree branch position prediction as a regression problem towards the horizontal locations of the branch along the vertical direction or vice versa. We present comparative experiments on Y-shaped trees with two state-of-the-art baselines, representing common approaches to the problem. Experiments show that HOB-CNN outperform the baselines at predicting branch position and shows robustness against varying levels of occlusion. We further validated HOB-CNN against two different types of 2D trees, and HOB-CNN shows generalization across different trees and robustness under different occluded conditions.
Semantic Segmentation for Partially Occluded Apple Trees Based on Deep Learning
Oct 14, 2020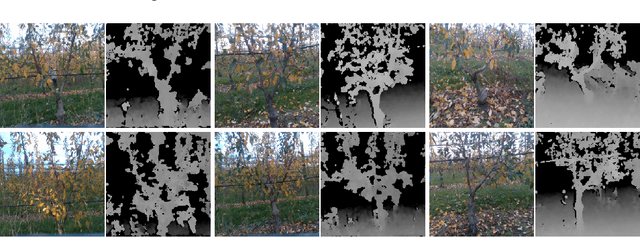
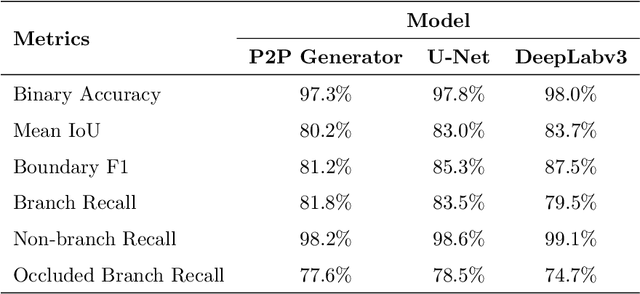
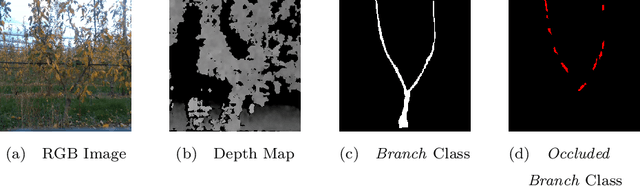
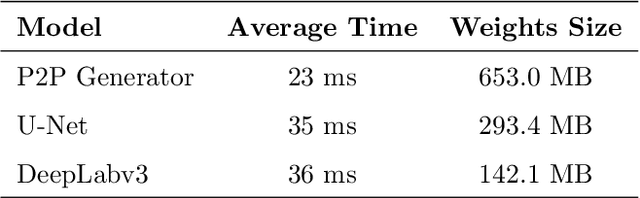
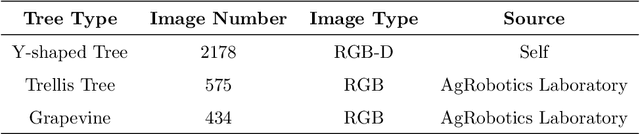
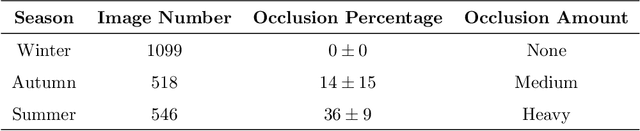
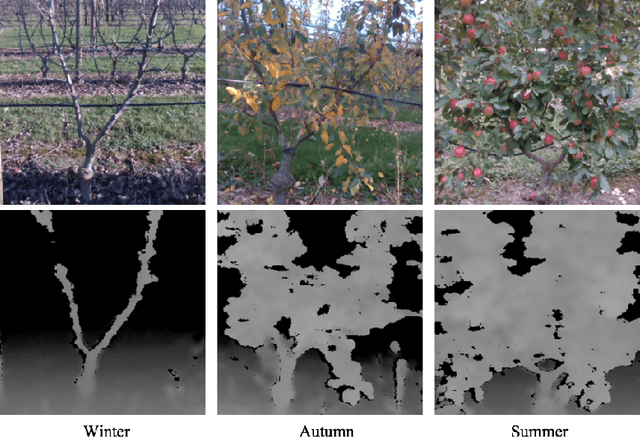
Fruit tree pruning and fruit thinning require a powerful vision system that can provide high resolution segmentation of the fruit trees and their branches. However, recent works only consider the dormant season, where there are minimal occlusions on the branches or fit a polynomial curve to reconstruct branch shape and hence, losing information about branch thickness. In this work, we apply two state-of-the-art supervised learning models U-Net and DeepLabv3, and a conditional Generative Adversarial Network Pix2Pix (with and without the discriminator) to segment partially occluded 2D-open-V apple trees. Binary accuracy, Mean IoU, Boundary F1 score and Occluded branch recall were used to evaluate the performances of the models. DeepLabv3 outperforms the other models at Binary accuracy, Mean IoU and Boundary F1 score, but is surpassed by Pix2Pix (without discriminator) and U-Net in Occluded branch recall. We define two difficulty indices to quantify the difficulty of the task: (1) Occlusion Difficulty Index and (2) Depth Difficulty Index. We analyze the worst 10 images in both difficulty indices by means of Branch Recall and Occluded Branch Recall. U-Net outperforms the other two models in the current metrics. On the other hand, Pix2Pix (without discriminator) provides more information on branch paths, which are not reflected by the metrics. This highlights the need for more specific metrics on recovering occluded information. Furthermore, this shows the usefulness of image-transfer networks for hallucination behind occlusions. Future work is required to further enhance the models to recover more information from occlusions such that this technology can be applied to automating agricultural tasks in a commercial environment.