 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Replanning for Improved Public Transport Routing
May 20, 2025Delays in public transport are common, often impacting users through prolonged travel times and missed transfers. Existing solutions for handling delays remain limited; backup plans based on historical data miss opportunities for earlier arrivals, while snapshot planning accounts for current delays but not future ones. With the growing availability of live delay data, users can adjust their journeys in real-time. However, the literature lacks a framework that fully exploits this advantage for system-scale dynamic replanning. To address this, we formalise the dynamic replanning problem in public transport routing and propose two solutions: a "pull" approach, where users manually request replanning, and a novel "push" approach, where the server proactively monitors and adjusts journeys. Our experiments show that the push approach outperforms the pull approach, achieving significant speedups. The results also reveal substantial arrival time savings enabled by dynamic replanning.
EHL*: Memory-Budgeted Indexing for Ultrafast Optimal Euclidean Pathfinding
Aug 21, 2024The Euclidean Shortest Path Problem (ESPP), which involves finding the shortest path in a Euclidean plane with polygonal obstacles, is a classic problem with numerous real-world applications. The current state-of-the-art solution, Euclidean Hub Labeling (EHL), offers ultra-fast query performance, outperforming existing techniques by 1-2 orders of magnitude in runtime efficiency. However, this performance comes at the cost of significant memory overhead, requiring up to tens of gigabytes of storage on large maps, which can limit its applicability in memory-constrained environments like mobile phones or smaller devices. Additionally, EHL's memory usage can only be determined after index construction, and while it provides a memory-runtime tradeoff, it does not fully optimize memory utilization. In this work, we introduce an improved version of EHL, called EHL*, which overcomes these limitations. A key contribution of EHL* is its ability to create an index that adheres to a specified memory budget while optimizing query runtime performance. Moreover, EHL* can leverage preknown query distributions, a common scenario in many real-world applications to further enhance runtime efficiency. Our results show that EHL* can reduce memory usage by up to 10-20 times without much impact on query runtime performance compared to EHL, making it a highly effective solution for optimal pathfinding in memory-constrained environments.
Tracking Progress in Multi-Agent Path Finding
May 15, 2023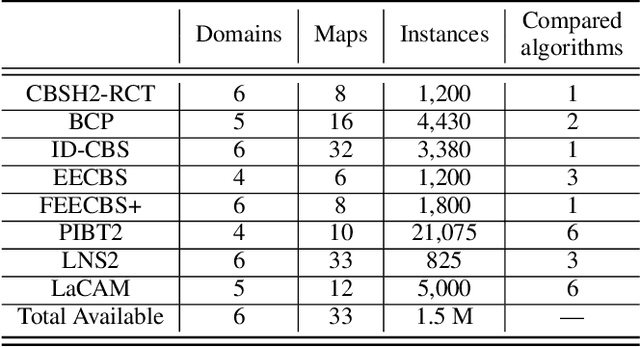
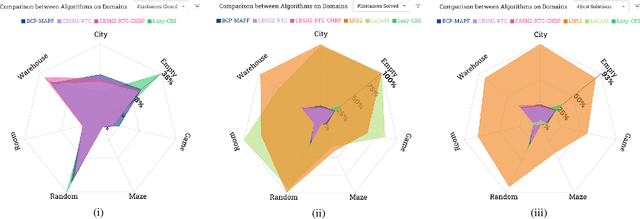
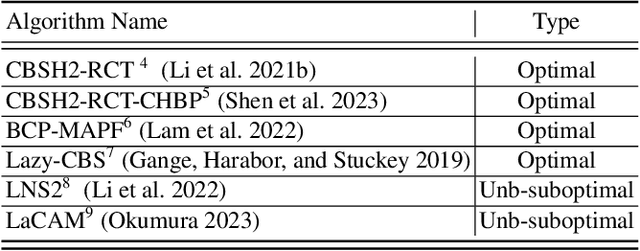
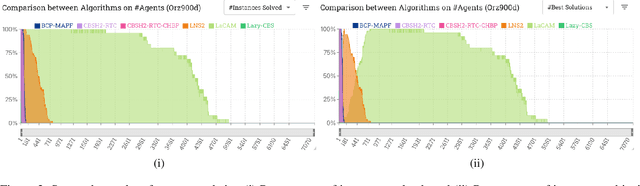
Multi-Agent Path Finding (MAPF) is an important core problem for many new and emerging industrial applications. Many works appear on this topic each year, and a large number of substantial advancements and performance improvements have been reported. Yet measuring overall progress in MAPF is difficult: there are many potential competitors, and the computational burden for comprehensive experimentation is prohibitively large. Moreover, detailed data from past experimentation is usually unavailable. In this work, we introduce a set of methodological and visualisation tools which can help the community establish clear indicators for state-of-the-art MAPF performance and which can facilitate large-scale comparisons between MAPF solvers. Our objectives are to lower the barrier of entry for new researchers and to further promote the study of MAPF, since progress in the area and the main challenges are made much clearer.