 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA-MHA*: Anytime Multi-Heuristic A*
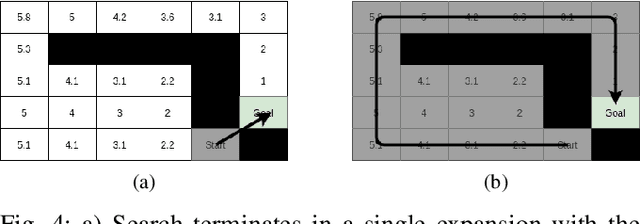
Aug 29, 2025Designing good heuristic functions for graph search requires adequate domain knowledge. It is often easy to design heuristics that perform well and correlate with the underlying true cost-to-go values in certain parts of the search space but these may not be admissible throughout the domain thereby affecting the optimality guarantees of the search. Bounded suboptimal search using several such partially good but inadmissible heuristics was developed in Multi-Heuristic A* (MHA*). Although MHA* leverages multiple inadmissible heuristics to potentially generate a faster suboptimal solution, the original version does not improve the solution over time. It is a one shot algorithm that requires careful setting of inflation factors to obtain a desired one time solution. In this work, we tackle this issue by extending MHA* to an anytime version that finds a feasible suboptimal solution quickly and continually improves it until time runs out. Our work is inspired from the Anytime Repairing A* (ARA*) algorithm. We prove that our precise adaptation of ARA* concepts in the MHA* framework preserves the original suboptimal and completeness guarantees and enhances MHA* to perform in an anytime fashion. Furthermore, we report the performance of A-MHA* in 3-D path planning domain and sliding tiles puzzle and compare against MHA* and other anytime algorithms.
Anytime Single-Step MAPF Planning with Anytime PIBT
Apr 10, 2025PIBT is a popular Multi-Agent Path Finding (MAPF) method at the core of many state-of-the-art MAPF methods including LaCAM, CS-PIBT, and WPPL. The main utility of PIBT is that it is a very fast and effective single-step MAPF solver and can return a collision-free single-step solution for hundreds of agents in less than a millisecond. However, the main drawback of PIBT is that it is extremely greedy in respect to its priorities and thus leads to poor solution quality. Additionally, PIBT cannot use all the planning time that might be available to it and returns the first solution it finds. We thus develop Anytime PIBT, which quickly finds a one-step solution identically to PIBT but then continuously improves the solution in an anytime manner. We prove that Anytime PIBT converges to the optimal solution given sufficient time. We experimentally validate that Anytime PIBT can rapidly improve single-step solution quality within milliseconds and even find the optimal single-step action. However, we interestingly find that improving the single-step solution quality does not have a significant effect on full-horizon solution costs.
Windowed MAPF with Completeness Guarantees
Oct 02, 2024



Traditional multi-agent path finding (MAPF) methods try to compute entire start-goal paths which are collision free. However, computing an entire path can take too long for MAPF systems where agents need to replan fast. Methods that address this typically employ a "windowed" approach and only try to find collision free paths for a small windowed timestep horizon. This adaptation comes at the cost of incompleteness; all current windowed approaches can become stuck in deadlock or livelock. Our main contribution is to introduce our framework, WinC-MAPF, for Windowed MAPF that enables completeness. Our framework uses heuristic update insights from single-agent real-time heuristic search algorithms as well as agent independence ideas from MAPF algorithms. We also develop Single-Step CBS (SS-CBS), an instantiation of this framework using a novel modification to CBS. We show how SS-CBS, which only plans a single step and updates heuristics, can effectively solve tough scenarios where existing windowed approaches fail.
A POMDP-based hierarchical planning framework for manipulation under pose uncertainty
Sep 27, 2024



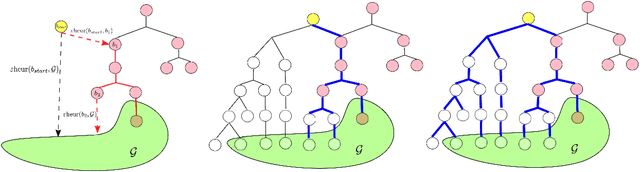
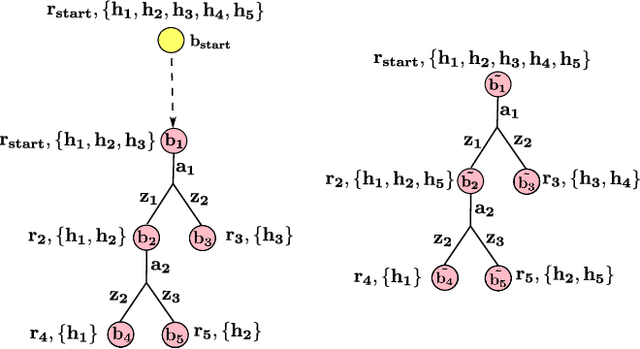
Robots often face challenges in domestic environments where visual feedback is ineffective, such as retrieving objects obstructed by occlusions or finding a light switch in the dark. In these cases, utilizing contacts to localize the target object can be effective. We propose an online planning framework using binary contact signals for manipulation tasks with pose uncertainty, formulated as a Partially Observable Markov Decision Process (POMDP). Naively representing the belief as a particle set makes planning infeasible due to the large uncertainties in domestic settings, as identifying the best sequence of actions requires rolling out thousands of actions across millions of particles, taking significant compute time. To address this, we propose a hierarchical belief representation. Initially, we represent the uncertainty coarsely in a 3D volumetric space. Policies that refine uncertainty in this space are computed and executed, and once uncertainty is sufficiently reduced, the problem is translated back into the particle space for further refinement before task completion. We utilize a closed-loop planning and execution framework with a heuristic-search-based anytime solver that computes partial policies within a limited time budget. The performance of the framework is demonstrated both in real world and in simulation on the high-precision task of inserting a plug into a port using a UR10e manipulator, resolving positional uncertainties up to 50 centimeters and angular uncertainties close to $2\pi$. Experimental results highlight the framework's effectiveness, achieving a 93\% success rate in the real world and over 50\% improvement in solution quality compared to greedy baselines, significantly accelerating planning and enabling real-time solutions for complex problems.
A preprocessing-based planning framework for utilizing contacts in high-precision insertion tasks
Jun 08, 2024

In manipulation tasks like plug insertion or assembly that have low tolerance to errors in pose estimation (errors of the order of 2mm can cause task failure), the utilization of touch/contact modality can aid in accurately localizing the object of interest. Motivated by this, in this work we model high-precision insertion tasks as planning problems under pose uncertainty, where we effectively utilize the occurrence of contacts (or the lack thereof) as observations to reduce uncertainty and reliably complete the task. We present a preprocessing-based planning framework for high-precision insertion in repetitive and time-critical settings, where the set of initial pose distributions (identified by a perception system) is finite. The finite set allows us to enumerate the possible planning problems that can be encountered online and preprocess a database of policies. Due to the computational complexity of constructing this database, we propose a general experience-based POMDP solver, E-RTDP-Bel, that uses the solutions of similar planning problems as experience to speed up planning queries and use it to efficiently construct the database. We show that the developed algorithm speeds up database creation by over a factor of 100, making the process computationally tractable. We demonstrate the effectiveness of the proposed framework in a real-world plug insertion task in the presence of port position uncertainty and a pipe assembly task in simulation in the presence of pipe pose uncertainty.
* \c{opyright} 2023 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
A Data Efficient Framework for Learning Local Heuristics
Apr 10, 2024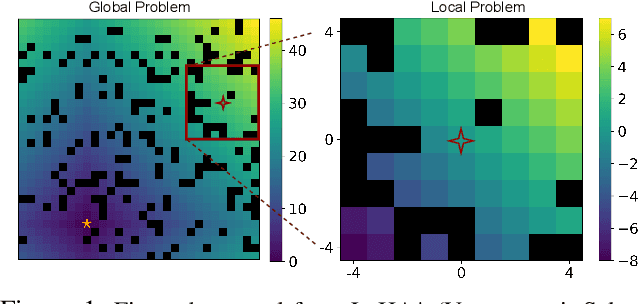


With the advent of machine learning, there have been several recent attempts to learn effective and generalizable heuristics. Local Heuristic A* (LoHA*) is one recent method that instead of learning the entire heuristic estimate, learns a "local" residual heuristic that estimates the cost to escape a region (Veerapaneni et al 2023). LoHA*, like other supervised learning methods, collects a dataset of target values by querying an oracle on many planning problems (in this case, local planning problems). This data collection process can become slow as the size of the local region increases or if the domain requires expensive collision checks. Our main insight is that when an A* search solves a start-goal planning problem it inherently ends up solving multiple local planning problems. We exploit this observation to propose an efficient data collection framework that does <1/10th the amount of work (measured by expansions) to collect the same amount of data in comparison to baselines. This idea also enables us to run LoHA* in an online manner where we can iteratively collect data and improve our model while solving relevant start-goal tasks. We demonstrate the performance of our data collection and online framework on a 4D $(x, y, \theta, v)$ navigation domain.
Preprocessing-based Kinodynamic Motion Planning Framework for Intercepting Projectiles using a Robot Manipulator
Jan 16, 2024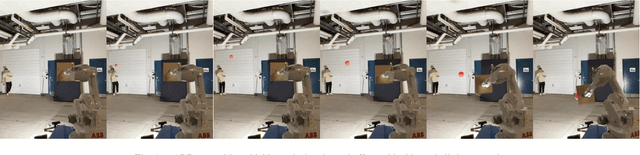

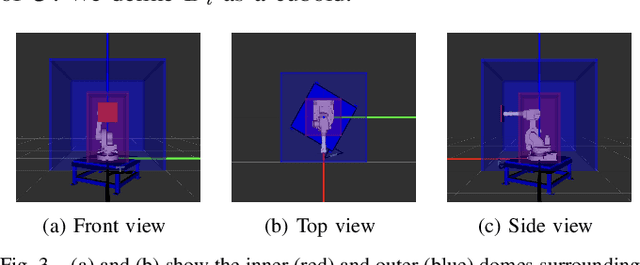
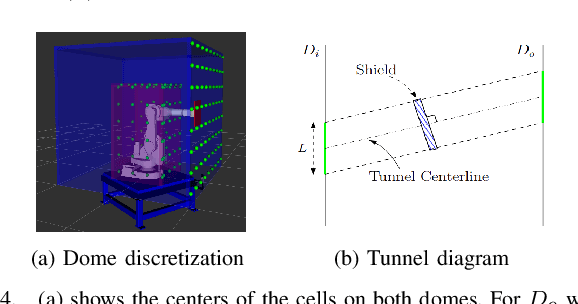
We are interested in studying sports with robots and starting with the problem of intercepting a projectile moving toward a robot manipulator equipped with a shield. To successfully perform this task, the robot needs to (i) detect the incoming projectile, (ii) predict the projectile's future motion, (iii) plan a minimum-time rapid trajectory that can evade obstacles and intercept the projectile, and (iv) execute the planned trajectory. These four steps must be performed under the manipulator's dynamic limits and extreme time constraints (<350ms in our setting) to successfully intercept the projectile. In addition, we want these trajectories to be smooth to reduce the robot's joint torques and the impulse on the platform on which it is mounted. To this end, we propose a kinodynamic motion planning framework that preprocesses smooth trajectories offline to allow real-time collision-free executions online. We present an end-to-end pipeline along with our planning framework, including perception, prediction, and execution modules. We evaluate our framework experimentally in simulation and show that it has a higher blocking success rate than the baselines. Further, we deploy our pipeline on a robotic system comprising an industrial arm (ABB IRB-1600) and an onboard stereo camera (ZED 2i), which achieves a 78% success rate in projectile interceptions.
Learning Local Heuristics for Search-Based Navigation Planning
Mar 16, 2023Graph search planning algorithms for navigation typically rely heavily on heuristics to efficiently plan paths. As a result, while such approaches require no training phase and can directly plan long horizon paths, they often require careful hand designing of informative heuristic functions. Recent works have started bypassing hand designed heuristics by using machine learning to learn heuristic functions that guide the search algorithm. While these methods can learn complex heuristic functions from raw input, they i) require a significant training phase and ii) do not generalize well to new maps and longer horizon paths. Our contribution is showing that instead of learning a global heuristic estimate, we can define and learn local heuristics which results in a significantly smaller learning problem and improves generalization. We show that using such local heuristics can reduce node expansions by 2-20x while maintaining bounded suboptimality, are easy to train, and generalize to new maps & long horizon plans.
Search-based Path Planning for a High Dimensional Manipulator in Cluttered Environments Using Optimization-based Primitives
Jul 06, 2021
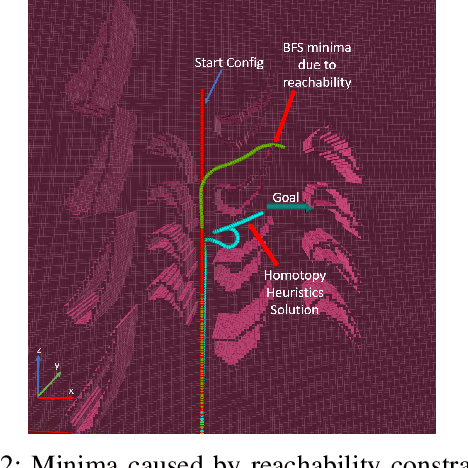
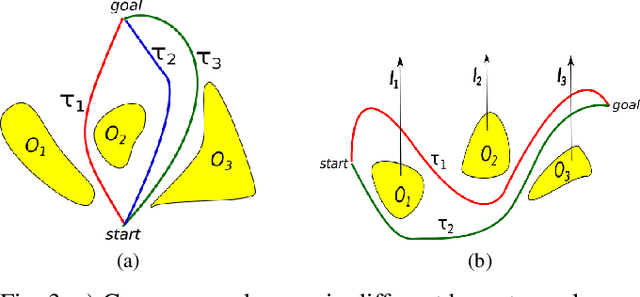
In this work we tackle the path planning problem for a 21-dimensional snake robot-like manipulator, navigating a cluttered gas turbine for the purposes of inspection. Heuristic search based approaches are effective planning strategies for common manipulation domains. However, their performance on high dimensional systems is heavily reliant on the effectiveness of the action space and the heuristics chosen. The complex nature of our system, reachability constraints, and highly cluttered turbine environment renders naive choices of action spaces and heuristics ineffective. To this extent we have developed i) a methodology for dynamically generating actions based on online optimization that help the robot navigate narrow spaces, ii) a technique for lazily generating these computationally expensive optimization actions to effectively utilize resources, and iii) heuristics that reason about the homotopy classes induced by the blades of the turbine in the robot workspace and a Multi-Heuristic framework which guides the search along the relevant classes. The impact of our contributions is presented through an experimental study in simulation, where the 21 DOF manipulator navigates towards regions of inspection within a turbine.
Manipulation Planning Among Movable Obstacles Using Physics-Based Adaptive Motion Primitives
Feb 08, 2021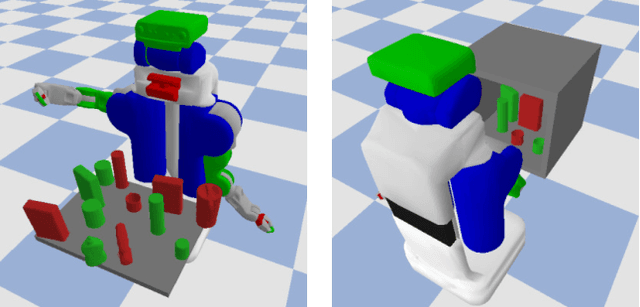
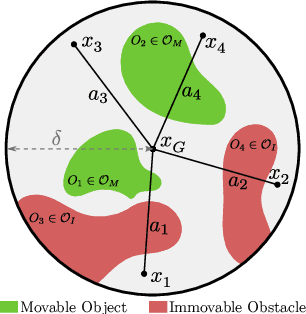
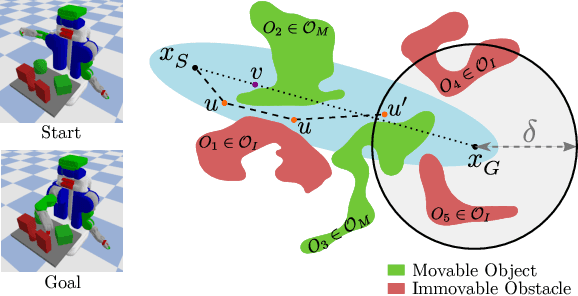
Robot manipulation in cluttered scenes often requires contact-rich interactions with objects. It can be more economical to interact via non-prehensile actions, for example, push through other objects to get to the desired grasp pose, instead of deliberate prehensile rearrangement of the scene. For each object in a scene, depending on its properties, the robot may or may not be allowed to make contact with, tilt, or topple it. To ensure that these constraints are satisfied during non-prehensile interactions, a planner can query a physics-based simulator to evaluate the complex multi-body interactions caused by robot actions. Unfortunately, it is infeasible to query the simulator for thousands of actions that need to be evaluated in a typical planning problem as each simulation is time-consuming. In this work, we show that (i) manipulation tasks (specifically pick-and-place style tasks from a tabletop or a refrigerator) can often be solved by restricting robot-object interactions to adaptive motion primitives in a plan, (ii) these actions can be incorporated as subgoals within a multi-heuristic search framework, and (iii) limiting interactions to these actions can help reduce the time spent querying the simulator during planning by up to 40x in comparison to baseline algorithms. Our algorithm is evaluated in simulation and in the real-world on a PR2 robot using PyBullet as our physics-based simulator. Supplementary video: \url{https://youtu.be/ABQc7JbeJPM}.