 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSearch-based Path Planning for a High Dimensional Manipulator in Cluttered Environments Using Optimization-based Primitives
Jul 06, 2021
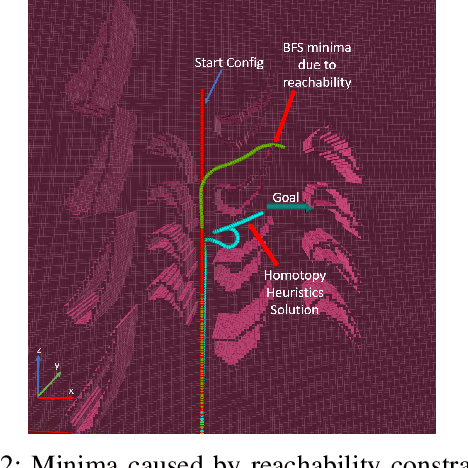
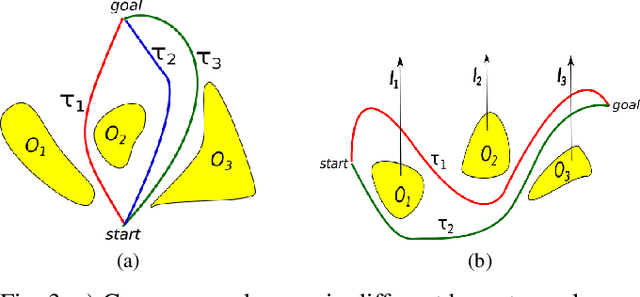
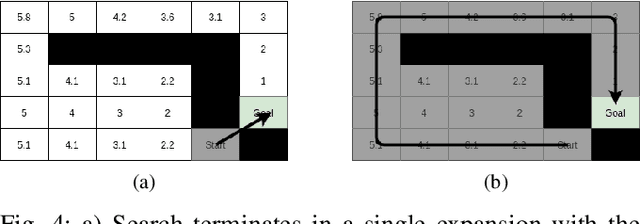
In this work we tackle the path planning problem for a 21-dimensional snake robot-like manipulator, navigating a cluttered gas turbine for the purposes of inspection. Heuristic search based approaches are effective planning strategies for common manipulation domains. However, their performance on high dimensional systems is heavily reliant on the effectiveness of the action space and the heuristics chosen. The complex nature of our system, reachability constraints, and highly cluttered turbine environment renders naive choices of action spaces and heuristics ineffective. To this extent we have developed i) a methodology for dynamically generating actions based on online optimization that help the robot navigate narrow spaces, ii) a technique for lazily generating these computationally expensive optimization actions to effectively utilize resources, and iii) heuristics that reason about the homotopy classes induced by the blades of the turbine in the robot workspace and a Multi-Heuristic framework which guides the search along the relevant classes. The impact of our contributions is presented through an experimental study in simulation, where the 21 DOF manipulator navigates towards regions of inspection within a turbine.