 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning with Selective Physics-based Simulation for Manipulation Among Movable Objects
Paper and Code
Mar 15, 2020
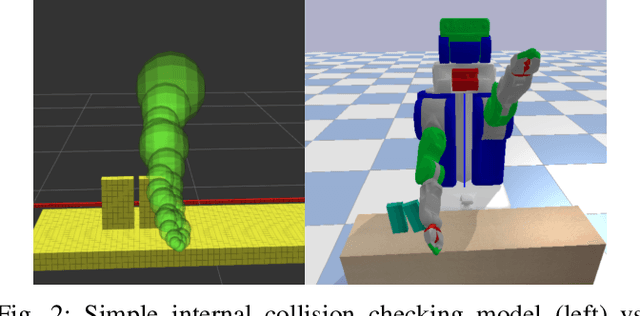

Use of physics-based simulation as a planning model enables a planner to reason and generate plans that involve non-trivial interactions with the world. For example, grasping a milk container out of a cluttered refrigerator may involve moving a robot manipulator in between other objects, pushing away the ones that are movable and avoiding interactions with certain fragile containers. A physics-based simulator allows a planner to reason about the effects of interactions with these objects and to generate a plan that grasps the milk container successfully. The use of physics-based simulation for planning however is underutilized. One of the reasons for it being that physics-based simulations are typically way too slow for being used within a planning loop that typically requires tens of thousands of actions to be evaluated within a matter of a second or two. In this work, we develop a planning algorithm that tries to address this challenge. In particular, it builds on the observation that only a small number of actions actually need to be simulated using physics, and the remaining set of actions, such as moving an arm around obstacles, can be evaluated using a much simpler internal planning model, e.g., a simple collision-checking model. Motivated by this, we develop an algorithm called Planning with Selective Physics-based Simulation that automatically discovers what should be simulated with physics and what can utilize an internal planning model for pick-and-place tasks.