 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDNQ: Deep Nash Q-Network for Partially Observable n-Player Games
Jun 04, 2026Many real-world competitive systems require multiple decision-makers to act simultaneously under shared constraints, limited information, and repeated interaction, as in auctions, resource allocation, and security competition. We study multi-turn simultaneous bidding as a controlled testbed for such problems and propose DNQ, a solver-in-the-loop equilibrium supervision framework for training bidding agents. DNQ alternates between trajectory collection, critic-based payoff estimation, equilibrium computation, and policy imitation. At each visited state, a shared critic predicts either pairwise payoff matrices or an exact N-player payoff tensor, an external solver computes equilibrium strategies, and the agents are trained by minimizing the KL divergence between their masked policies and the solver-derived equilibrium targets. We focus on a scalable pairwise formulation that greatly reduces equilibrium-solving cost and training time compared with the exact formulation, while the shared critic amortizes payoff learning across agents and states. Experiments compare the pairwise and exact variants using critic loss, policy entropy, bidding resource usage, and training cost, showing that the pairwise method scales to larger numbers of agents, whereas the exact method becomes computationally impractical as the joint game grows. These results illustrate the trade-off between strategic fidelity and scalability in repeated competitive environments.
FORMULA: FORmation MPC with neUral barrier Learning for safety Assurance
Apr 06, 2026Multi-robot systems (MRS) are essential for large-scale applications such as disaster response, material transport, and warehouse logistics, yet ensuring robust, safety-aware formation control in cluttered and dynamic environments remains a major challenge. Existing model predictive control (MPC) approaches suffer from limitations in scalability and provable safety, while control barrier functions (CBFs), though principled for safety enforcement, are difficult to handcraft for large-scale nonlinear systems. This paper presents FORMULA, a safe distributed, learning-enhanced predictive control framework that integrates MPC with Control Lyapunov Functions (CLFs) for stability and neural network-based CBFs for decentralized safety, eliminating manual safety constraint design. This scheme maintains formation integrity during obstacle avoidance, resolves deadlocks in dense configurations, and reduces online computational load. Simulation results demonstrate that FORMULA enables scalable, safety-aware, formation-preserving navigation for multi-robot teams in complex environments.
Explore Reinforced: Equilibrium Approximation with Reinforcement Learning
Dec 02, 2024


Current approximate Coarse Correlated Equilibria (CCE) algorithms struggle with equilibrium approximation for games in large stochastic environments but are theoretically guaranteed to converge to a strong solution concept. In contrast, modern Reinforcement Learning (RL) algorithms provide faster training yet yield weaker solutions. We introduce Exp3-IXrl - a blend of RL and game-theoretic approach, separating the RL agent's action selection from the equilibrium computation while preserving the integrity of the learning process. We demonstrate that our algorithm expands the application of equilibrium approximation algorithms to new environments. Specifically, we show the improved performance in a complex and adversarial cybersecurity network environment - the Cyber Operations Research Gym - and in the classical multi-armed bandit settings.
Preprocessing-based Kinodynamic Motion Planning Framework for Intercepting Projectiles using a Robot Manipulator
Jan 16, 2024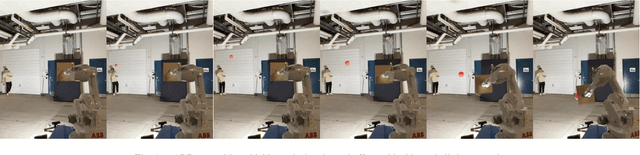

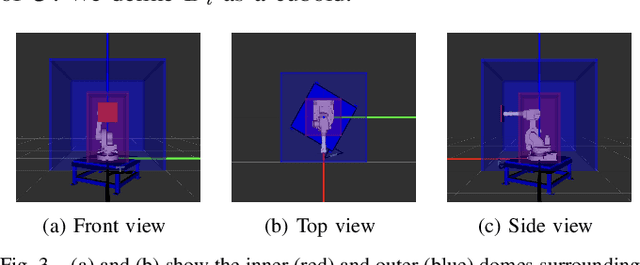
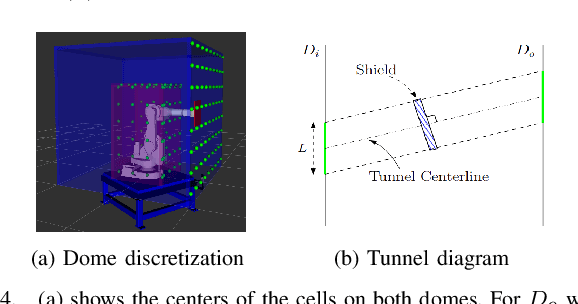
We are interested in studying sports with robots and starting with the problem of intercepting a projectile moving toward a robot manipulator equipped with a shield. To successfully perform this task, the robot needs to (i) detect the incoming projectile, (ii) predict the projectile's future motion, (iii) plan a minimum-time rapid trajectory that can evade obstacles and intercept the projectile, and (iv) execute the planned trajectory. These four steps must be performed under the manipulator's dynamic limits and extreme time constraints (<350ms in our setting) to successfully intercept the projectile. In addition, we want these trajectories to be smooth to reduce the robot's joint torques and the impulse on the platform on which it is mounted. To this end, we propose a kinodynamic motion planning framework that preprocesses smooth trajectories offline to allow real-time collision-free executions online. We present an end-to-end pipeline along with our planning framework, including perception, prediction, and execution modules. We evaluate our framework experimentally in simulation and show that it has a higher blocking success rate than the baselines. Further, we deploy our pipeline on a robotic system comprising an industrial arm (ABB IRB-1600) and an onboard stereo camera (ZED 2i), which achieves a 78% success rate in projectile interceptions.