 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBounded Exploration with World Model Uncertainty in Soft Actor-Critic Reinforcement Learning Algorithm
Dec 09, 2024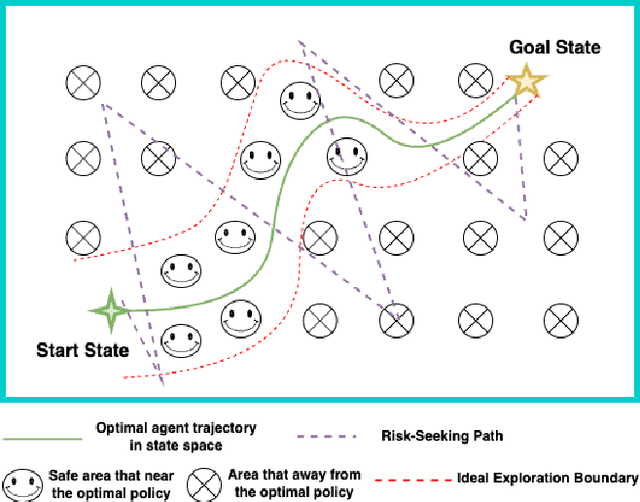
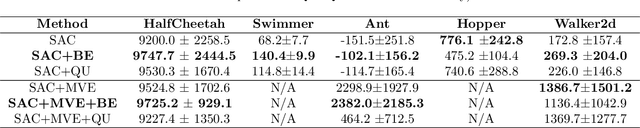
One of the bottlenecks preventing Deep Reinforcement Learning algorithms (DRL) from real-world applications is how to explore the environment and collect informative transitions efficiently. The present paper describes bounded exploration, a novel exploration method that integrates both 'soft' and intrinsic motivation exploration. Bounded exploration notably improved the Soft Actor-Critic algorithm's performance and its model-based extension's converging speed. It achieved the highest score in 6 out of 8 experiments. Bounded exploration presents an alternative method to introduce intrinsic motivations to exploration when the original reward function has strict meanings.
* 8 pages, 7 figures. Accepted as a poster presentation in the Australian Robotics and Automation Association (2023)
A Sign Language Recognition System with Pepper, Lightweight-Transformer, and LLM
Sep 28, 2023This research explores using lightweight deep neural network architectures to enable the humanoid robot Pepper to understand American Sign Language (ASL) and facilitate non-verbal human-robot interaction. First, we introduce a lightweight and efficient model for ASL understanding optimized for embedded systems, ensuring rapid sign recognition while conserving computational resources. Building upon this, we employ large language models (LLMs) for intelligent robot interactions. Through intricate prompt engineering, we tailor interactions to allow the Pepper Robot to generate natural Co-Speech Gesture responses, laying the foundation for more organic and intuitive humanoid-robot dialogues. Finally, we present an integrated software pipeline, embodying advancements in a socially aware AI interaction model. Leveraging the Pepper Robot's capabilities, we demonstrate the practicality and effectiveness of our approach in real-world scenarios. The results highlight a profound potential for enhancing human-robot interaction through non-verbal interactions, bridging communication gaps, and making technology more accessible and understandable.
Seeing the Fruit for the Leaves: Robotically Mapping Apple Fruitlets in a Commercial Orchard
Aug 15, 2023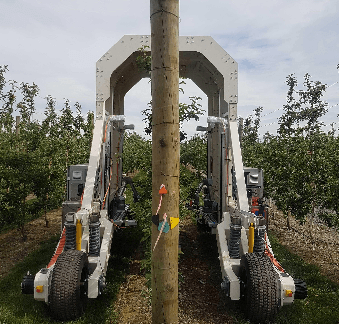

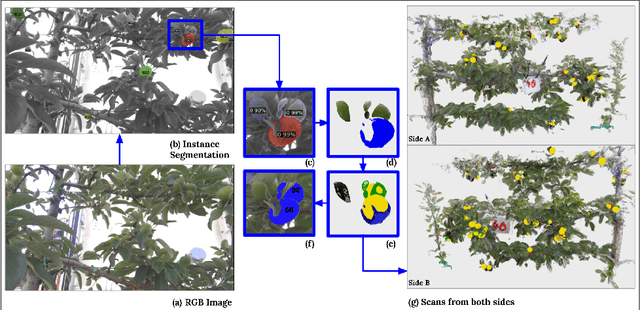
Aotearoa New Zealand has a strong and growing apple industry but struggles to access workers to complete skilled, seasonal tasks such as thinning. To ensure effective thinning and make informed decisions on a per-tree basis, it is crucial to accurately measure the crop load of individual apple trees. However, this task poses challenges due to the dense foliage that hides the fruitlets within the tree structure. In this paper, we introduce the vision system of an automated apple fruitlet thinning robot, developed to tackle the labor shortage issue. This paper presents the initial design, implementation,and evaluation specifics of the system. The platform straddles the 3.4 m tall 2D apple canopy structures to create an accurate map of the fruitlets on each tree. We show that this platform can measure the fruitlet load on an apple tree by scanning through both sides of the branch. The requirement of an overarching platform was justified since two-sided scans had a higher counting accuracy of 81.17 % than one-sided scans at 73.7 %. The system was also demonstrated to produce size estimates within 5.9% RMSE of their true size.
Seeing the Fruit for the Leaves: Towards Automated Apple Fruitlet Thinning
Feb 20, 2023



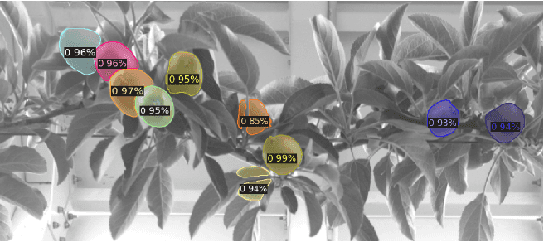
Following a global trend, the lack of reliable access to skilled labour is causing critical issues for the effective management of apple orchards. One of the primary challenges is maintaining skilled human operators capable of making precise fruitlet thinning decisions. Thinning requires accurately measuring the true crop load for individual apple trees to provide optimal thinning decisions on an individual basis. A challenging task due to the dense foliage obscuring the fruitlets within the tree structure. This paper presents the initial design, implementation, and evaluation details of the vision system for an automatic apple fruitlet thinning robot to meet this need. The platform consists of a UR5 robotic arm and stereo cameras which enable it to look around the leaves to map the precise number and size of the fruitlets on the apple branches. We show that this platform can measure the fruitlet load on the apple tree to with 84% accuracy in a real-world commercial apple orchard while being 87% precise.
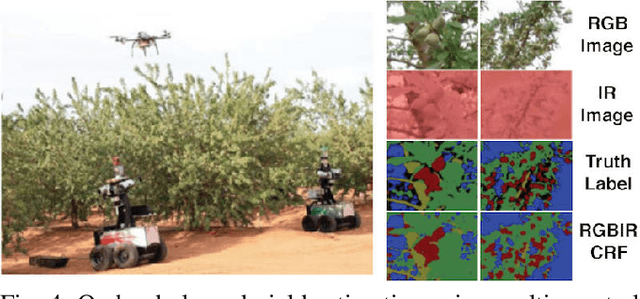
deepNIR: Datasets for generating synthetic NIR images and improved fruit detection system using deep learning techniques
Mar 17, 2022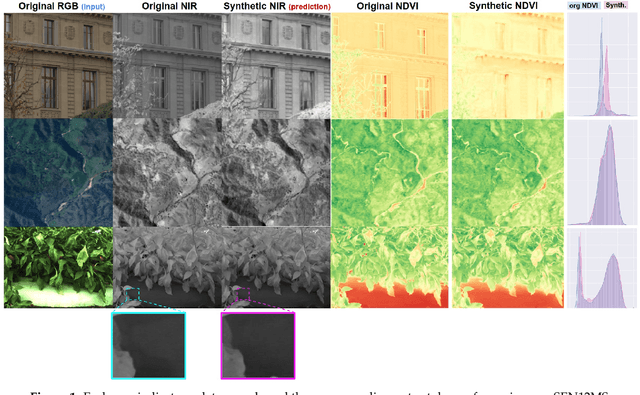
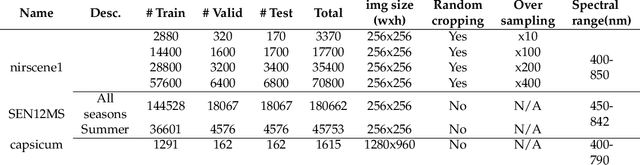
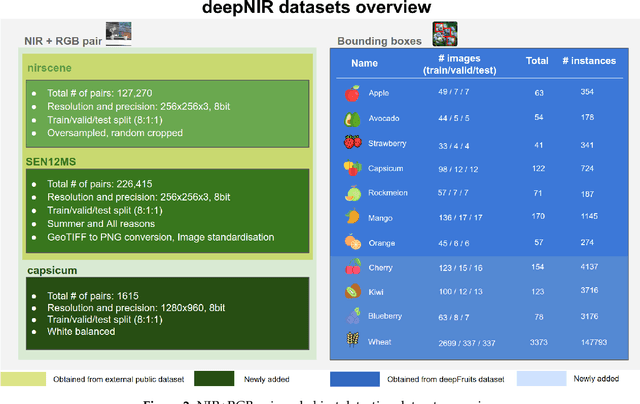
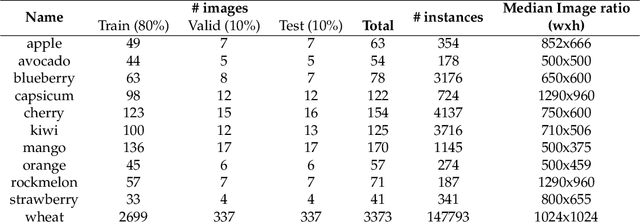
This paper presents datasets utilised for synthetic near-infrared (NIR) image generation and bounding-box level fruit detection systems. It is undeniable that high-calibre machine learning frameworks such as Tensorflow or Pytorch, and large-scale ImageNet or COCO datasets with the aid of accelerated GPU hardware have pushed the limit of machine learning techniques for more than decades. Among these breakthroughs, a high-quality dataset is one of the essential building blocks that can lead to success in model generalisation and the deployment of data-driven deep neural networks. In particular, synthetic data generation tasks often require more training samples than other supervised approaches. Therefore, in this paper, we share the NIR+RGB datasets that are re-processed from two public datasets (i.e., nirscene and SEN12MS) and our novel NIR+RGB sweet pepper(capsicum) dataset. We quantitatively and qualitatively demonstrate that these NIR+RGB datasets are sufficient to be used for synthetic NIR image generation. We achieved Frechet Inception Distance (FID) of 11.36, 26.53, and 40.15 for nirscene1, SEN12MS, and sweet pepper datasets respectively. In addition, we release manual annotations of 11 fruit bounding boxes that can be exported as various formats using cloud service. Four newly added fruits [blueberry, cherry, kiwi, and wheat] compound 11 novel bounding box datasets on top of our previous work presented in the deepFruits project [apple, avocado, capsicum, mango, orange, rockmelon, strawberry]. The total number of bounding box instances of the dataset is 162k and it is ready to use from cloud service. For the evaluation of the dataset, Yolov5 single stage detector is exploited and reported impressive mean-average-precision,mAP[0.5:0.95] results of[min:0.49, max:0.812]. We hope these datasets are useful and serve as a baseline for the future studies.
Subsentence Extraction from Text Using Coverage-Based Deep Learning Language Models
May 07, 2021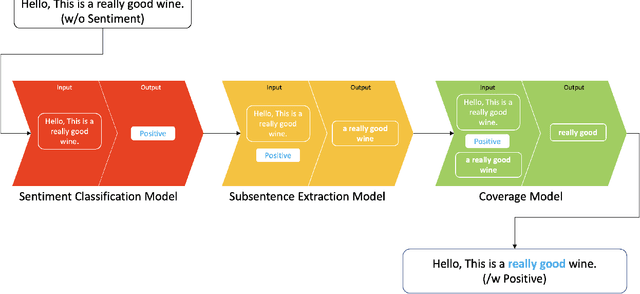
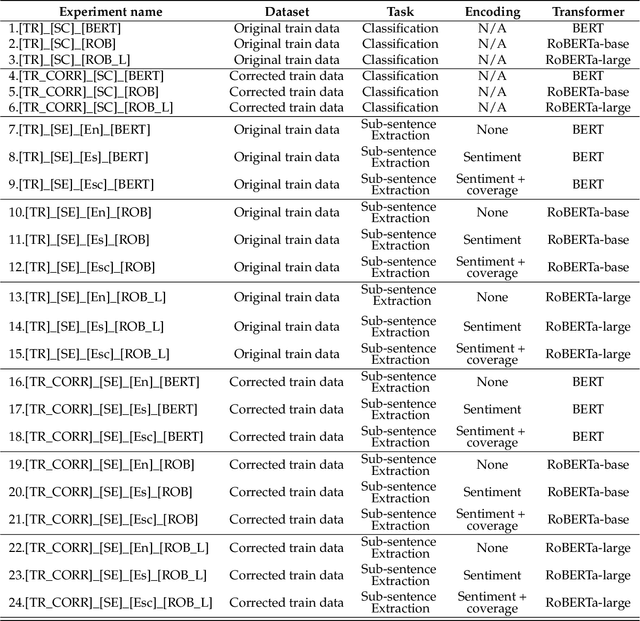
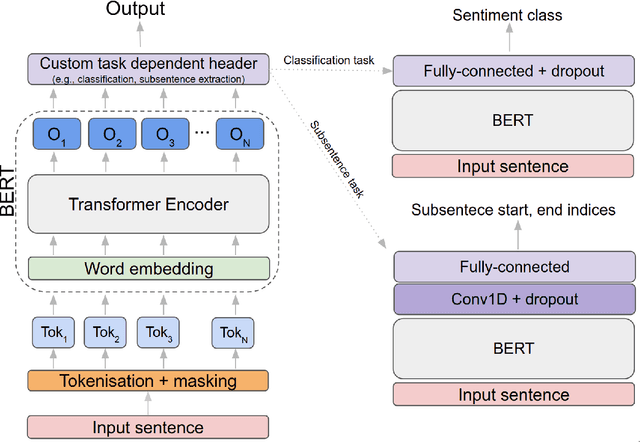
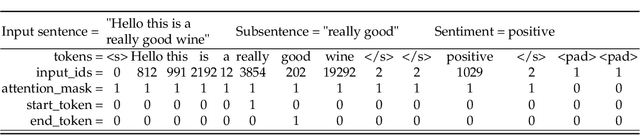
Sentiment prediction remains a challenging and unresolved task in various research fields, including psychology, neuroscience, and computer science. This stems from its high degree of subjectivity and limited input sources that can effectively capture the actual sentiment. This can be even more challenging with only text-based input. Meanwhile, the rise of deep learning and an unprecedented large volume of data have paved the way for artificial intelligence to perform impressively accurate predictions or even human-level reasoning. Drawing inspiration from this, we propose a coverage-based sentiment and subsentence extraction system that estimates a span of input text and recursively feeds this information back to the networks. The predicted subsentence consists of auxiliary information expressing a sentiment. This is an important building block for enabling vivid and epic sentiment delivery (within the scope of this paper) and for other natural language processing tasks such as text summarisation and Q&A. Our approach outperforms the state-of-the-art approaches by a large margin in subsentence prediction (i.e., Average Jaccard scores from 0.72 to 0.89). For the evaluation, we designed rigorous experiments consisting of 24 ablation studies. Finally, our learned lessons are returned to the community by sharing software packages and a public dataset that can reproduce the results presented in this paper.
* 27 pages, 16 figures
Design and Development of a Robotic Vehicle for Shallow-Water Marine Inspections
Jul 09, 2020
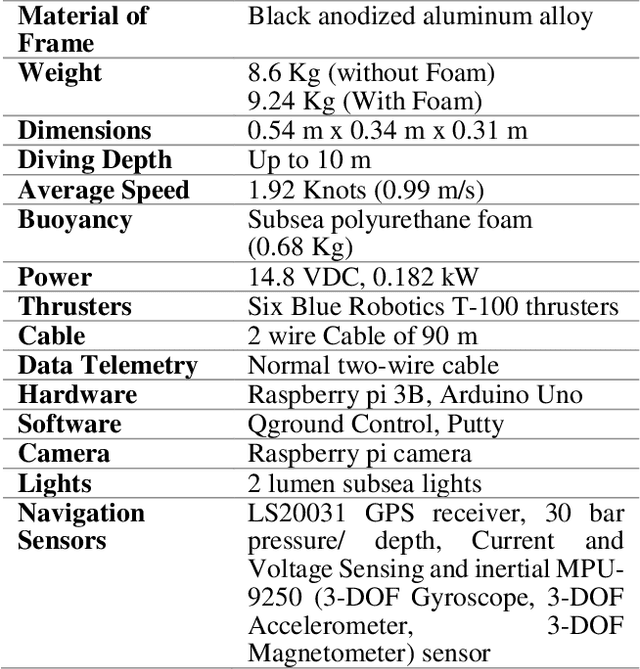
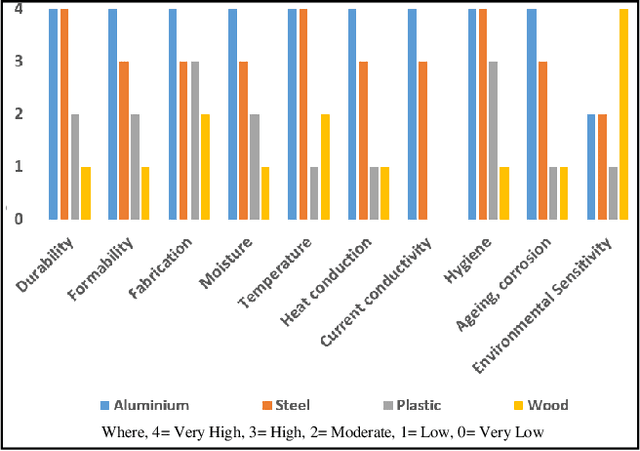
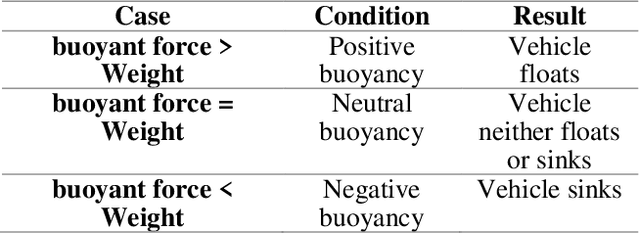
Underwater marine inspections for ship hull or marine debris, etc. are one of the vital measures carried out to ensure the safety of marine structures and underwater species. This work details the design, development and qualification of a compact and economical observation class Remotely Operated Vehicle (ROV) prototype, intended for carrying out scientific research in shallow-waters. The ROV has a real-time processor and controller onboard, which synchronizes the movement of the vehicle based on the commands from the surface station. The vehicle piloting is done using the onboard Raspberry pi camera and the support of some navigation sensors like Global Positioning System (GPS), inertial, temperature, depth and pressure. This prototype of ROV is a compact unit built using a limited number of components and is suitable for underwater inspection using a single camera. The developed ROV is initially tested in a pool.
Kiwifruit detection in challenging conditions
Jun 21, 2020


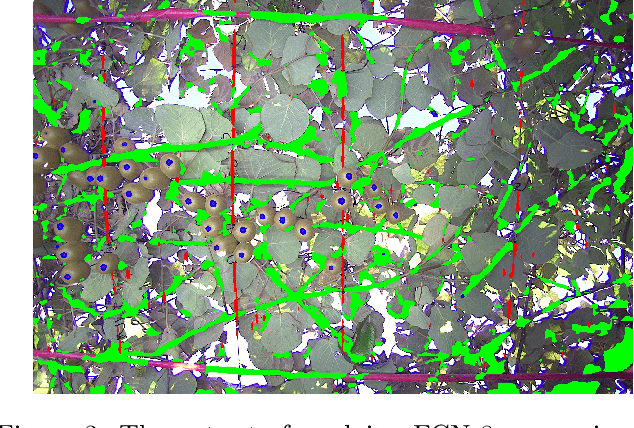
Accurate and reliable kiwifruit detection is one of the biggest challenges in developing a selective fruit harvesting robot. The vision system of an orchard robot faces difficulties such as dynamic lighting conditions and fruit occlusions. This paper presents a semantic segmentation approach with two novel image prepossessing techniques designed to detect kiwifruit under the harsh lighting conditions found in the canopy. The performance of the presented system is evaluated on a 3D real-world image set of kiwifruit under different lighting conditions (typical, glare, and overexposed). Alone the semantic segmentation approach achieves an F1_score of 0.82 on the typical lighting image set, but struggles with harsh lighting with an F1_score of 0.13. Utilising the prepossessing techniques the vision system under harsh lighting improves to an F1_score 0.42. To address the fruit occlusion challenge, the overall approach was found to be capable of detecting 87.0% of non-occluded and 30.0% of occluded kiwifruit across all lighting conditions.
Design of a sensing module for a kiwifruit flower pollinator robot
Jun 14, 2020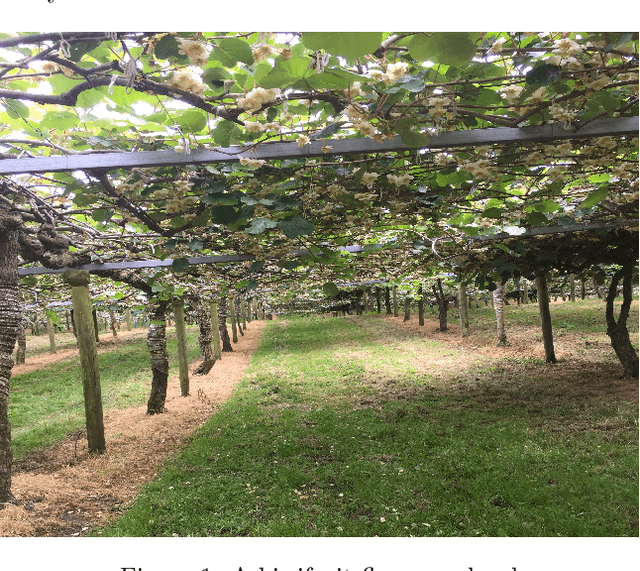

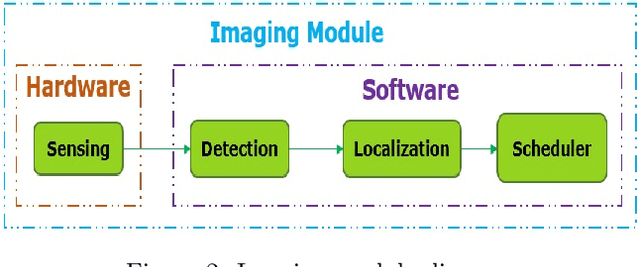

This paper describes steps taken to develop a sensing module for a robotic kiwifruit flower pollinator, which could be integrated into an imaging module and a spray module. The paper described different indicators to present the performance of the sensing module that can be used as a benchmark. The sensing module provides data for the imaging module to detect kiwifruit flower reliably and accurately in the canopy. Four major challenges for a sensing module is the speed, accuracy, visibility, and robustness to variable lighting conditions. Regarding these issues, Basler acA1920-40uc camera with an LM6HC lens were selected from a list of fast cameras and lenses based on different parameters. The sensing module was tested in four orchards and captured 9128 images. According to the saturation rate parameter, the captured images were typical in 96% of conditions and the rest were glare due to the sunny weather and early season. The camera speed and field of view guarantee that in the highest speed of the robot a flower can be seen at least in three images in normal conditions. The sensing module was calibrated with less than 3 mm error and integrated to the spray module. The pollinator module was mounted on a robot and tested in the real world and achieved 79.5% hit rate at an average velocity of 3.5 km/h.
An Overview of Perception Methods for Horticultural Robots: From Pollination to Harvest
Jun 26, 2018


Horticultural enterprises are becoming more sophisticated as the range of the crops they target expands. Requirements for enhanced efficiency and productivity have driven the demand for automating on-field operations. However, various problems remain yet to be solved for their reliable, safe deployment in real-world scenarios. This paper examines major research trends and current challenges in horticultural robotics. Specifically, our work focuses on sensing and perception in the three main horticultural procedures: pollination, yield estimation, and harvesting. For each task, we expose major issues arising from the unstructured, cluttered, and rugged nature of field environments, including variable lighting conditions and difficulties in fruit-specific detection, and highlight promising contemporary studies.