 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Branch-to-Tool Distance Estimation for Autonomous UAV Pruning: Benchmarking Five DEFOM-Stereo Variants from Simulation to Jetson Deployment
Mar 27, 2026Autonomous tree pruning with unmanned aerial vehicles (UAVs) is a safety-critical real-world task: the onboard perception system must estimate the metric distance from a cutting tool to thin tree branches in real time so that the UAV can approach, align, and actuate the pruner without collision. We address this problem by training five variants of DEFOM-Stereo - a recent foundation-model-based stereo matcher - on a task-specific synthetic dataset and deploying the checkpoints on an NVIDIA Jetson Orin Super 16 GB. The training corpus is built in Unreal Engine 5 with a simulated ZED Mini stereo camera capturing 5,520 stereo pairs across 115 tree instances from three viewpoints at 2m distance; dense EXR depth maps provide exact, spatially complete supervision for thin branches. On the synthetic test set, DEFOM-Stereo ViT-S achieves the best depth-domain accuracy (EPE 1.74 px, D1-all 5.81%, delta-1 95.90%, depth MAE 23.40 cm) but its Jetson inference speed of ~2.2 FPS (~450 ms per frame) remains too slow for responsive closed-loop tool control. A newly introduced balanced variant, DEFOM-PrunePlus (~21M backbone, ~3.3 FPS on Jetson), offers the best deployable accuracy-speed trade-off (EPE 5.87 px, depth MAE 64.26 cm, delta-1 87.59%): its frame rate is sufficient for real-time guidance and its depth accuracy supports safe branch approach planning at the 2m operating range. The lightweight DEFOM-PruneStereo (~6.9 FPS) and DEFOM-PruneNano (~8.5 FPS) run fast but sacrifice substantial accuracy (depth MAE > 57 cm), making estimates too unreliable for safe actuation. Zero-shot inference on real photographs confirms that full-capacity models preserve branch geometry, validating the sim-to-real transfer. We conclude that DEFOM-PrunePlus provides the most practical accuracy-latency balance for onboard distance estimation, while ViT-S serves as the reference for future hardware.
UE5-Forest: A Photorealistic Synthetic Stereo Dataset for UAV Forestry Depth Estimation
Mar 13, 2026Dense ground-truth disparity maps are practically unobtainable in forestry environments, where thin overlapping branches and complex canopy geometry defeat conventional depth sensors -- a critical bottleneck for training supervised stereo matching networks for autonomous UAV-based pruning. We present UE5-Forest, a photorealistic synthetic stereo dataset built entirely in Unreal Engine 5 (UE5). One hundred and fifteen photogrammetry-scanned trees from the Quixel Megascans library are placed in virtual scenes and captured by a simulated stereo rig whose intrinsics -- 63 mm baseline, 2.8 mm focal length, 3.84 mm sensor width -- replicate the ZED Mini camera mounted on our drone. Orbiting each tree at up to 2 m across three elevation bands (horizontal, +45 degrees, -45 degrees) yields 5,520 rectified 1920 x 1080 stereo pairs with pixel-perfect disparity labels. We provide a statistical characterisation of the dataset -- covering disparity distributions, scene diversity, and visual fidelity -- and a qualitative comparison with real-world Canterbury Tree Branches imagery that confirms the photorealistic quality and geometric plausibility of the rendered data. The dataset will be publicly released to provide the community with a ready-to-use benchmark and training resource for stereo-based forestry depth estimation.
Progressive Per-Branch Depth Optimization for DEFOM-Stereo and SAM3 Joint Analysis in UAV Forestry Applications
Feb 24, 2026Accurate per-branch 3D reconstruction is a prerequisite for autonomous UAV-based tree pruning; however, dense disparity maps from modern stereo matchers often remain too noisy for individual branch analysis in complex forest canopies. This paper introduces a progressive pipeline integrating DEFOM-Stereo foundation-model disparity estimation, SAM3 instance segmentation, and multi-stage depth optimization to deliver robust per-branch point clouds. Starting from a naive baseline, we systematically identify and resolve three error families through successive refinements. Mask boundary contamination is first addressed through morphological erosion and subsequently refined via a skeleton-preserving variant to safeguard thin-branch topology. Segmentation inaccuracy is then mitigated using LAB-space Mahalanobis color validation coupled with cross-branch overlap arbitration. Finally, depth noise - the most persistent error source - is initially reduced by outlier removal and median filtering, before being superseded by a robust five-stage scheme comprising MAD global detection, spatial density consensus, local MAD filtering, RGB-guided filtering, and adaptive bilateral filtering. Evaluated on 1920x1080 stereo imagery of Radiata pine (Pinus radiata) acquired with a ZED Mini camera (63 mm baseline) from a UAV in Canterbury, New Zealand, the proposed pipeline reduces the average per-branch depth standard deviation by 82% while retaining edge fidelity. The result is geometrically coherent 3D point clouds suitable for autonomous pruning tool positioning. All code and processed data are publicly released to facilitate further UAV forestry research.
Training Deep Stereo Matching Networks on Tree Branch Imagery: A Benchmark Study for Real-Time UAV Forestry Applications
Feb 23, 2026Autonomous drone-based tree pruning needs accurate, real-time depth estimation from stereo cameras. Depth is computed from disparity maps using $Z = f B/d$, so even small disparity errors cause noticeable depth mistakes at working distances. Building on our earlier work that identified DEFOM-Stereo as the best reference disparity generator for vegetation scenes, we present the first study to train and test ten deep stereo matching networks on real tree branch images. We use the Canterbury Tree Branches dataset -- 5,313 stereo pairs from a ZED Mini camera at 1080P and 720P -- with DEFOM-generated disparity maps as training targets. The ten methods cover step-by-step refinement, 3D convolution, edge-aware attention, and lightweight designs. Using perceptual metrics (SSIM, LPIPS, ViTScore) and structural metrics (SIFT/ORB feature matching), we find that BANet-3D produces the best overall quality (SSIM = 0.883, LPIPS = 0.157), while RAFT-Stereo scores highest on scene-level understanding (ViTScore = 0.799). Testing on an NVIDIA Jetson Orin Super (16 GB, independently powered) mounted on our drone shows that AnyNet reaches 6.99 FPS at 1080P -- the only near-real-time option -- while BANet-2D gives the best quality-speed balance at 1.21 FPS. We also compare 720P and 1080P processing times to guide resolution choices for forestry drone systems.
Towards Gold-Standard Depth Estimation for Tree Branches in UAV Forestry: Benchmarking Deep Stereo Matching Methods
Jan 27, 2026Autonomous UAV forestry operations require robust depth estimation with strong cross-domain generalization, yet existing evaluations focus on urban and indoor scenarios, leaving a critical gap for vegetation-dense environments. We present the first systematic zero-shot evaluation of eight stereo methods spanning iterative refinement, foundation model, diffusion-based, and 3D CNN paradigms. All methods use officially released pretrained weights (trained on Scene Flow) and are evaluated on four standard benchmarks (ETH3D, KITTI 2012/2015, Middlebury) plus a novel 5,313-pair Canterbury Tree Branches dataset ($1920 \times 1080$). Results reveal scene-dependent patterns: foundation models excel on structured scenes (BridgeDepth: 0.23 px on ETH3D; DEFOM: 4.65 px on Middlebury), while iterative methods show variable cross-benchmark performance (IGEV++: 0.36 px on ETH3D but 6.77 px on Middlebury; IGEV: 0.33 px on ETH3D but 4.99 px on Middlebury). Qualitative evaluation on the Tree Branches dataset establishes DEFOM as the gold-standard baseline for vegetation depth estimation, with superior cross-domain consistency (consistently ranking 1st-2nd across benchmarks, average rank 1.75). DEFOM predictions will serve as pseudo-ground-truth for future benchmarking.
Accurate 3D Grapevine Structure Extraction from High-Resolution Point Clouds
Feb 26, 2025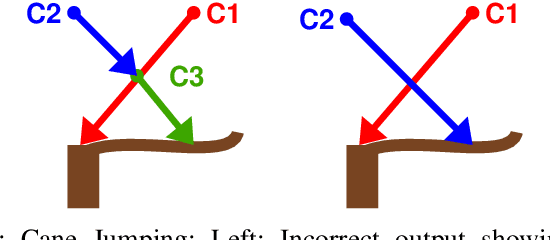
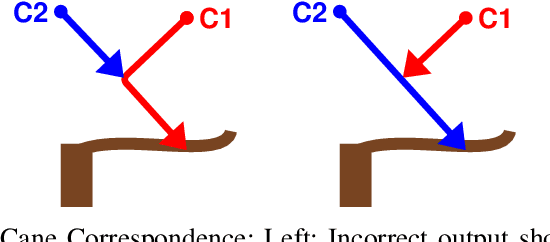
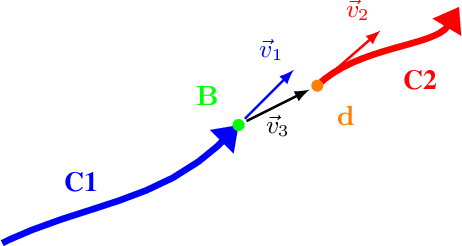
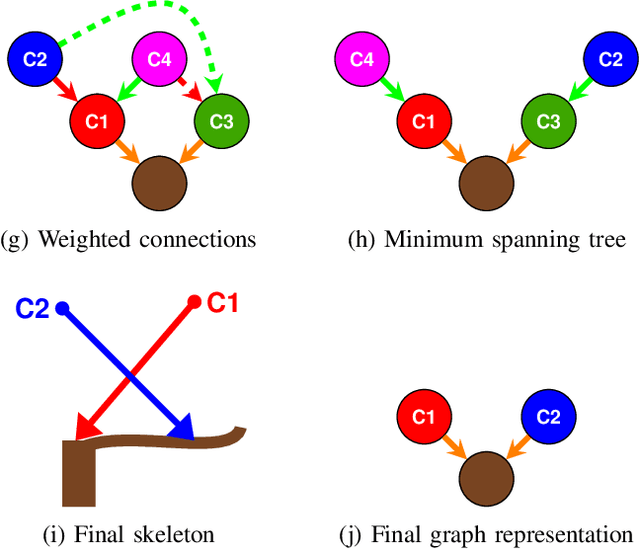
Accurate 3D modelling of grapevines is crucial for precision viticulture, particularly for informed pruning decisions and automated management techniques. However, the intricate structure of grapevines poses significant challenges for traditional skeletonization algorithms. This paper presents an adaptation of the Smart-Tree algorithm for 3D grapevine modelling, addressing the unique characteristics of grapevine structures. We introduce a graph-based method for disambiguating skeletonization. Our method delineates individual cane skeletons, which are crucial for precise analysis and management. We validate our approach using annotated real-world grapevine point clouds, demonstrating improvement of 15.8% in the F1 score compared to the original Smart-Tree algorithm. This research contributes to advancing 3D grapevine modelling techniques, potentially enhancing both the sustainability and profitability of grape production through more precise and automated viticulture practices
Drone Stereo Vision for Radiata Pine Branch Detection and Distance Measurement: Integrating SGBM and Segmentation Models
Sep 26, 2024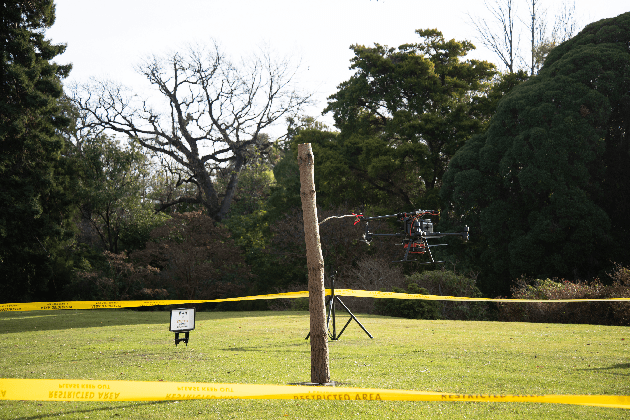
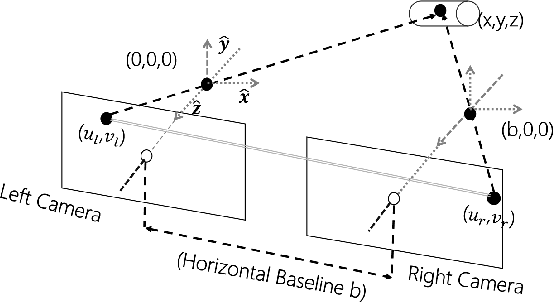
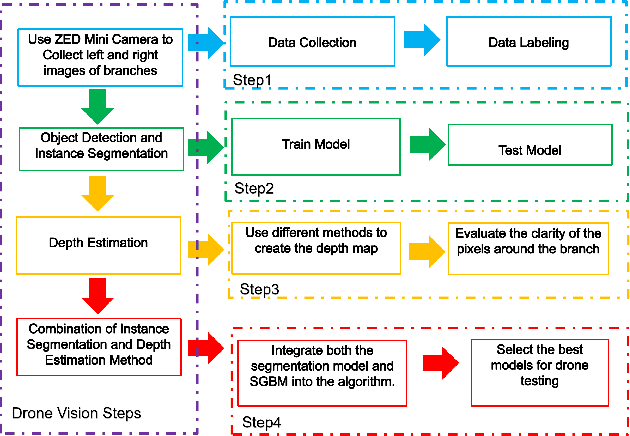
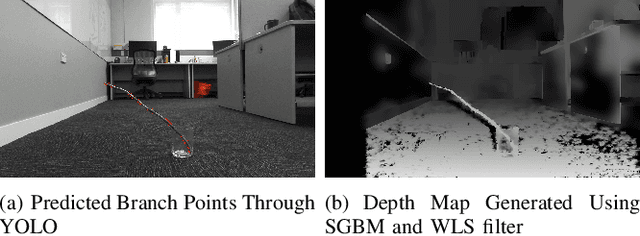
Manual pruning of radiata pine trees presents significant safety risks due to their substantial height and the challenging terrains in which they thrive. To address these risks, this research proposes the development of a drone-based pruning system equipped with specialized pruning tools and a stereo vision camera, enabling precise detection and trimming of branches. Deep learning algorithms, including YOLO and Mask R-CNN, are employed to ensure accurate branch detection, while the Semi-Global Matching algorithm is integrated to provide reliable distance estimation. The synergy between these techniques facilitates the precise identification of branch locations and enables efficient, targeted pruning. Experimental results demonstrate that the combined implementation of YOLO and SGBM enables the drone to accurately detect branches and measure their distances from the drone. This research not only improves the safety and efficiency of pruning operations but also makes a significant contribution to the advancement of drone technology in the automation of agricultural and forestry practices, laying a foundational framework for further innovations in environmental management.
Smart-Tree: Neural Medial Axis Approximation of Point Clouds for 3D Tree Skeletonization
Mar 21, 2023



In this paper, we present Smart-Tree, a supervised method for approximating the medial axes of branch skeletons from a tree's point cloud. A sparse voxel convolutional neural network extracts each input point's radius and direction towards the medial axis. A greedy algorithm performs robust skeletonization using the estimated medial axis. The proposed method provides robustness to complex tree structures and improves fidelity when dealing with self-occlusions, complex geometry, touching branches, and varying point densities. We train and test the method using a multi-species synthetic tree data set and perform qualitative analysis on a real-life tree point cloud. Experimentation with synthetic and real-world datasets demonstrates the robustness of our approach over the current state-of-the-art method. Further research will focus on training the method on a broader range of tree species and improving robustness to point cloud gaps. The details to obtain the dataset are at https://github.com/uc-vision/synthetic-trees.
Seeing the Fruit for the Leaves: Towards Automated Apple Fruitlet Thinning
Feb 20, 2023



Following a global trend, the lack of reliable access to skilled labour is causing critical issues for the effective management of apple orchards. One of the primary challenges is maintaining skilled human operators capable of making precise fruitlet thinning decisions. Thinning requires accurately measuring the true crop load for individual apple trees to provide optimal thinning decisions on an individual basis. A challenging task due to the dense foliage obscuring the fruitlets within the tree structure. This paper presents the initial design, implementation, and evaluation details of the vision system for an automatic apple fruitlet thinning robot to meet this need. The platform consists of a UR5 robotic arm and stereo cameras which enable it to look around the leaves to map the precise number and size of the fruitlets on the apple branches. We show that this platform can measure the fruitlet load on the apple tree to with 84% accuracy in a real-world commercial apple orchard while being 87% precise.
Zero NeRF: Registration with Zero Overlap
Nov 22, 2022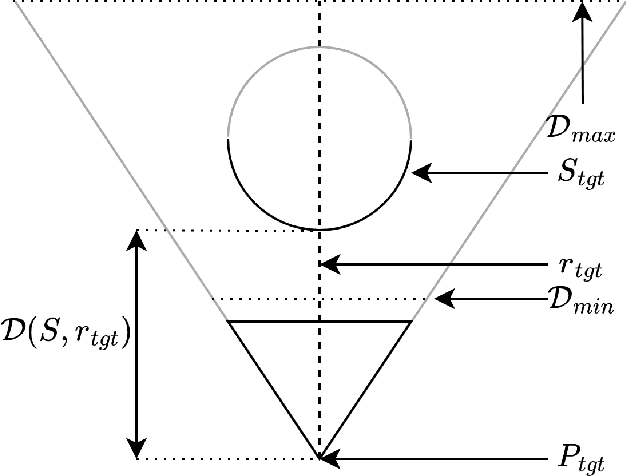
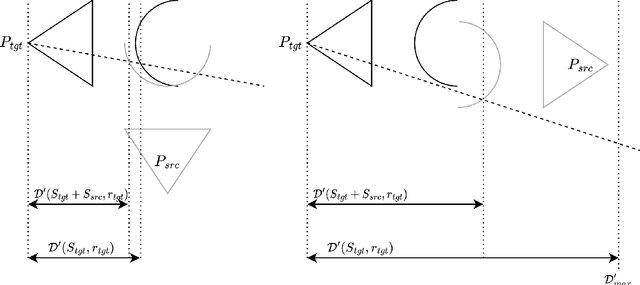
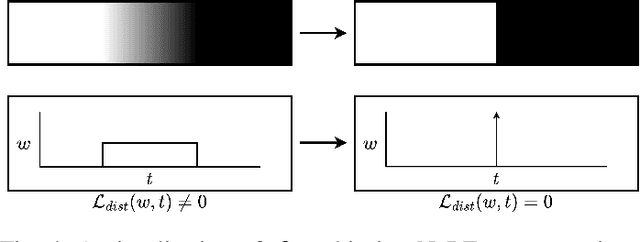
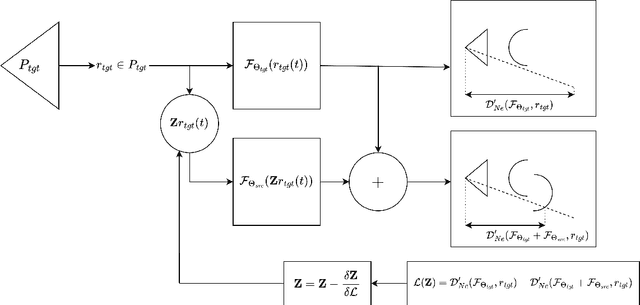
We present Zero-NeRF, a projective surface registration method that, to the best of our knowledge, offers the first general solution capable of alignment between scene representations with minimal or zero visual correspondence. To do this, we enforce consistency between visible surfaces of partial and complete reconstructions, which allows us to constrain occluded geometry. We use a NeRF as our surface representation and the NeRF rendering pipeline to perform this alignment. To demonstrate the efficacy of our method, we register real-world scenes from opposite sides with infinitesimal overlaps that cannot be accurately registered using prior methods, and we compare these results against widely used registration methods.