 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetection of Spider Mites on Labrador Beans through Machine Learning Approaches Using Custom Datasets
Feb 12, 2024
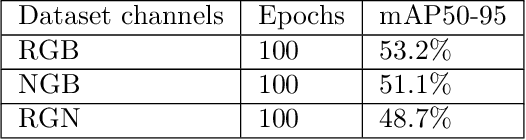
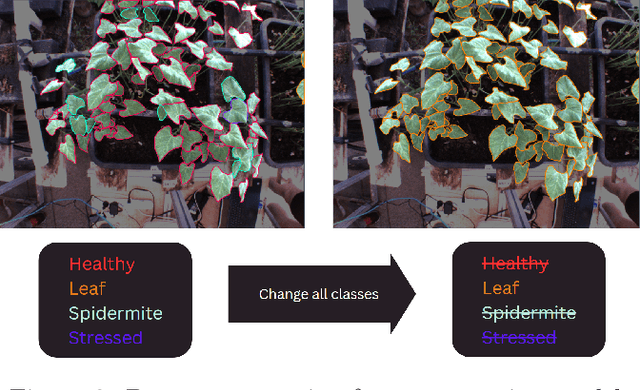
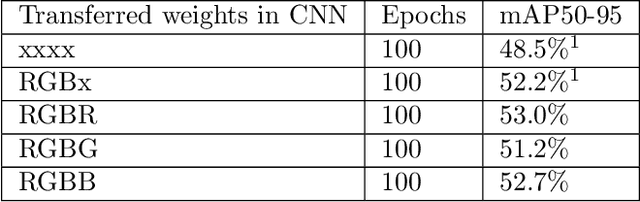
Amidst growing food production demands, early plant disease detection is essential to safeguard crops; this study proposes a visual machine learning approach for plant disease detection, harnessing RGB and NIR data collected in real-world conditions through a JAI FS-1600D-10GE camera to build an RGBN dataset. A two-stage early plant disease detection model with YOLOv8 and a sequential CNN was used to train on a dataset with partial labels, which showed a 3.6% increase in mAP compared to a single-stage end-to-end segmentation model. The sequential CNN model achieved 90.62% validation accuracy utilising RGBN data. An average of 6.25% validation accuracy increase is found using RGBN in classification compared to RGB using ResNet15 and the sequential CNN models. Further research and dataset improvements are needed to meet food production demands.
Seeing the Fruit for the Leaves: Robotically Mapping Apple Fruitlets in a Commercial Orchard
Aug 15, 2023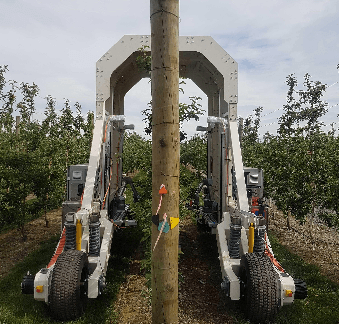

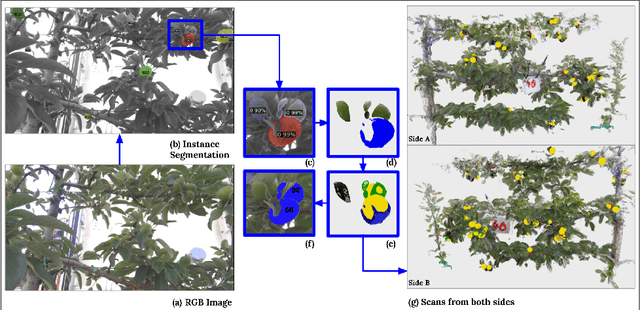
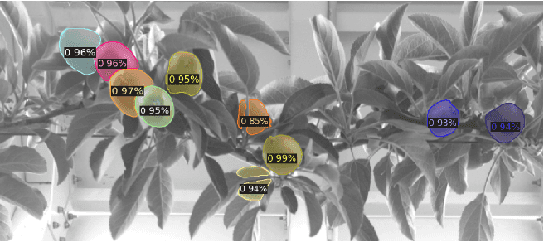
Aotearoa New Zealand has a strong and growing apple industry but struggles to access workers to complete skilled, seasonal tasks such as thinning. To ensure effective thinning and make informed decisions on a per-tree basis, it is crucial to accurately measure the crop load of individual apple trees. However, this task poses challenges due to the dense foliage that hides the fruitlets within the tree structure. In this paper, we introduce the vision system of an automated apple fruitlet thinning robot, developed to tackle the labor shortage issue. This paper presents the initial design, implementation,and evaluation specifics of the system. The platform straddles the 3.4 m tall 2D apple canopy structures to create an accurate map of the fruitlets on each tree. We show that this platform can measure the fruitlet load on an apple tree by scanning through both sides of the branch. The requirement of an overarching platform was justified since two-sided scans had a higher counting accuracy of 81.17 % than one-sided scans at 73.7 %. The system was also demonstrated to produce size estimates within 5.9% RMSE of their true size.
Seeing the Fruit for the Leaves: Towards Automated Apple Fruitlet Thinning
Feb 20, 2023



Following a global trend, the lack of reliable access to skilled labour is causing critical issues for the effective management of apple orchards. One of the primary challenges is maintaining skilled human operators capable of making precise fruitlet thinning decisions. Thinning requires accurately measuring the true crop load for individual apple trees to provide optimal thinning decisions on an individual basis. A challenging task due to the dense foliage obscuring the fruitlets within the tree structure. This paper presents the initial design, implementation, and evaluation details of the vision system for an automatic apple fruitlet thinning robot to meet this need. The platform consists of a UR5 robotic arm and stereo cameras which enable it to look around the leaves to map the precise number and size of the fruitlets on the apple branches. We show that this platform can measure the fruitlet load on the apple tree to with 84% accuracy in a real-world commercial apple orchard while being 87% precise.