Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding shorter paths for robot arms using their redundancy
Paper and Code
Aug 21, 2017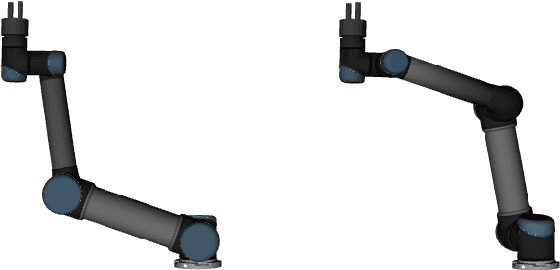
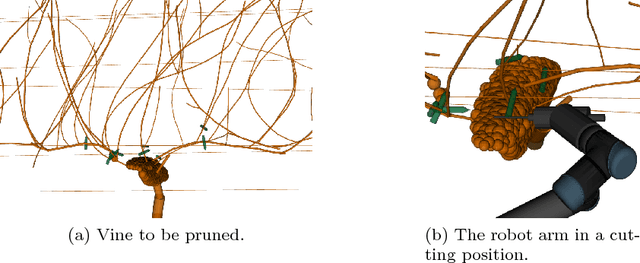
Many robot arms can accomplish one task using many different joint configurations. Often only one of these configurations is used as a goal by the path planner. Ideally the robot's path planner would be able to use the extra configurations to find higher quality paths. In this paper we use the extra goal configurations to find significantly shorter paths that are faster to execute compared to a planner that chooses one goal configuration arbitrarily. In a grape vine pruning robot arm experiment our proposed approach reduced execution times by 58%.
View paper on