 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccurate 3D Grapevine Structure Extraction from High-Resolution Point Clouds
Feb 26, 2025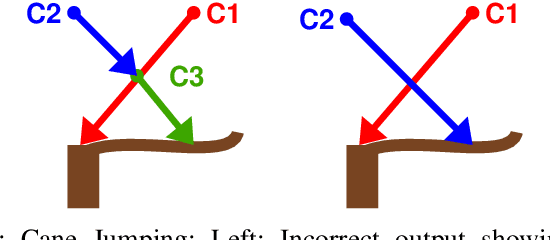
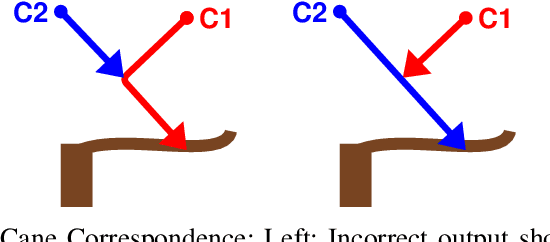
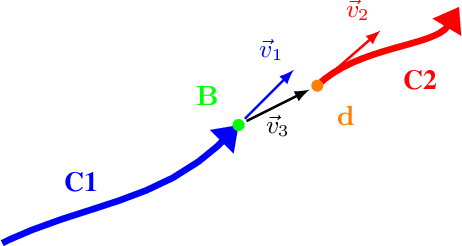
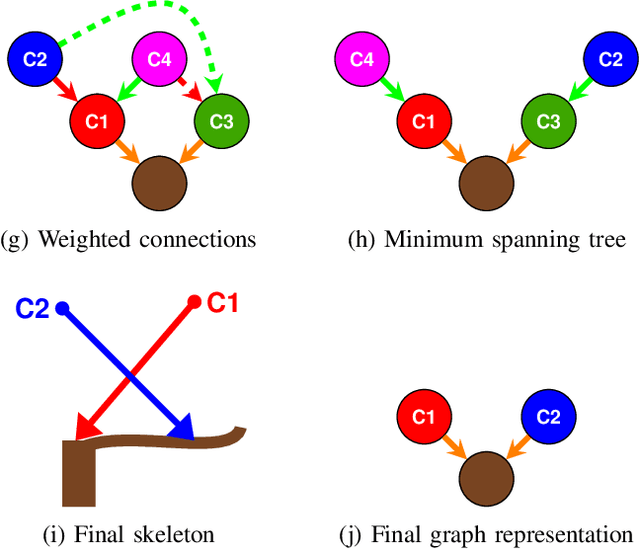
Accurate 3D modelling of grapevines is crucial for precision viticulture, particularly for informed pruning decisions and automated management techniques. However, the intricate structure of grapevines poses significant challenges for traditional skeletonization algorithms. This paper presents an adaptation of the Smart-Tree algorithm for 3D grapevine modelling, addressing the unique characteristics of grapevine structures. We introduce a graph-based method for disambiguating skeletonization. Our method delineates individual cane skeletons, which are crucial for precise analysis and management. We validate our approach using annotated real-world grapevine point clouds, demonstrating improvement of 15.8% in the F1 score compared to the original Smart-Tree algorithm. This research contributes to advancing 3D grapevine modelling techniques, potentially enhancing both the sustainability and profitability of grape production through more precise and automated viticulture practices
Smart-Tree: Neural Medial Axis Approximation of Point Clouds for 3D Tree Skeletonization
Mar 21, 2023



In this paper, we present Smart-Tree, a supervised method for approximating the medial axes of branch skeletons from a tree's point cloud. A sparse voxel convolutional neural network extracts each input point's radius and direction towards the medial axis. A greedy algorithm performs robust skeletonization using the estimated medial axis. The proposed method provides robustness to complex tree structures and improves fidelity when dealing with self-occlusions, complex geometry, touching branches, and varying point densities. We train and test the method using a multi-species synthetic tree data set and perform qualitative analysis on a real-life tree point cloud. Experimentation with synthetic and real-world datasets demonstrates the robustness of our approach over the current state-of-the-art method. Further research will focus on training the method on a broader range of tree species and improving robustness to point cloud gaps. The details to obtain the dataset are at https://github.com/uc-vision/synthetic-trees.
Zero NeRF: Registration with Zero Overlap
Nov 22, 2022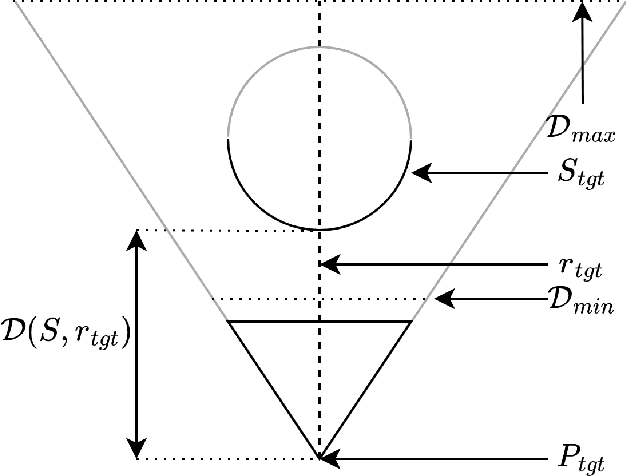
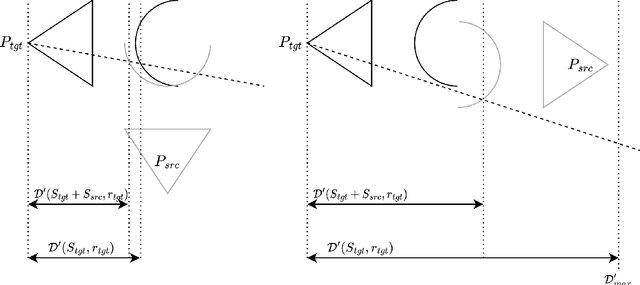
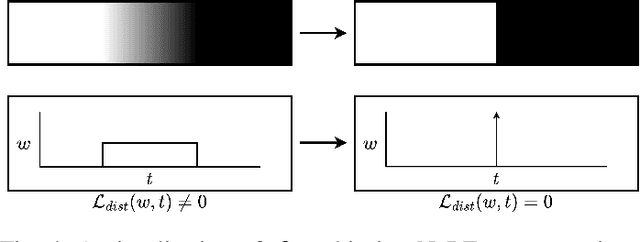
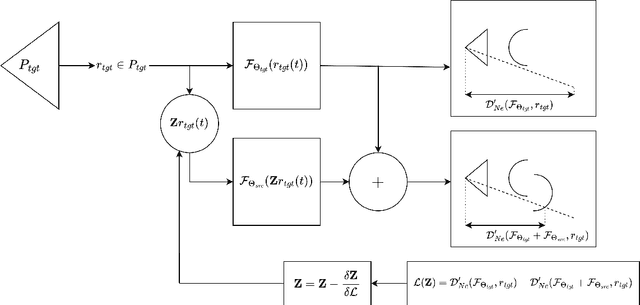
We present Zero-NeRF, a projective surface registration method that, to the best of our knowledge, offers the first general solution capable of alignment between scene representations with minimal or zero visual correspondence. To do this, we enforce consistency between visible surfaces of partial and complete reconstructions, which allows us to constrain occluded geometry. We use a NeRF as our surface representation and the NeRF rendering pipeline to perform this alignment. To demonstrate the efficacy of our method, we register real-world scenes from opposite sides with infinitesimal overlaps that cannot be accurately registered using prior methods, and we compare these results against widely used registration methods.