 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Gold-Standard Depth Estimation for Tree Branches in UAV Forestry: Benchmarking Deep Stereo Matching Methods
Jan 27, 2026Autonomous UAV forestry operations require robust depth estimation with strong cross-domain generalization, yet existing evaluations focus on urban and indoor scenarios, leaving a critical gap for vegetation-dense environments. We present the first systematic zero-shot evaluation of eight stereo methods spanning iterative refinement, foundation model, diffusion-based, and 3D CNN paradigms. All methods use officially released pretrained weights (trained on Scene Flow) and are evaluated on four standard benchmarks (ETH3D, KITTI 2012/2015, Middlebury) plus a novel 5,313-pair Canterbury Tree Branches dataset ($1920 \times 1080$). Results reveal scene-dependent patterns: foundation models excel on structured scenes (BridgeDepth: 0.23 px on ETH3D; DEFOM: 4.65 px on Middlebury), while iterative methods show variable cross-benchmark performance (IGEV++: 0.36 px on ETH3D but 6.77 px on Middlebury; IGEV: 0.33 px on ETH3D but 4.99 px on Middlebury). Qualitative evaluation on the Tree Branches dataset establishes DEFOM as the gold-standard baseline for vegetation depth estimation, with superior cross-domain consistency (consistently ranking 1st-2nd across benchmarks, average rank 1.75). DEFOM predictions will serve as pseudo-ground-truth for future benchmarking.
Drone Stereo Vision for Radiata Pine Branch Detection and Distance Measurement: Integrating SGBM and Segmentation Models
Sep 26, 2024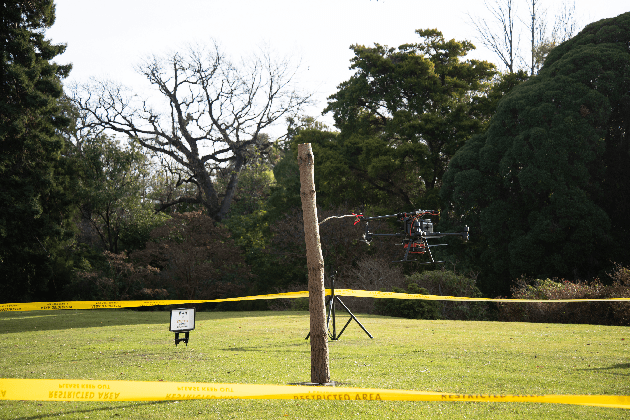
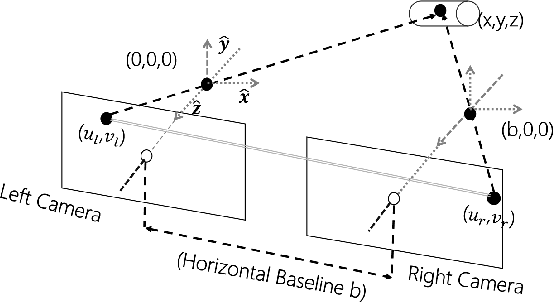
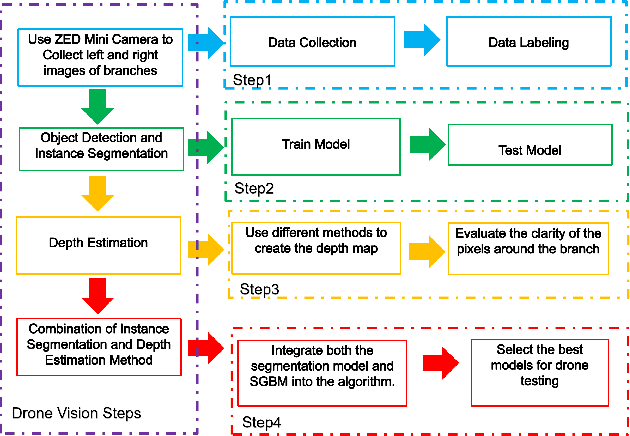
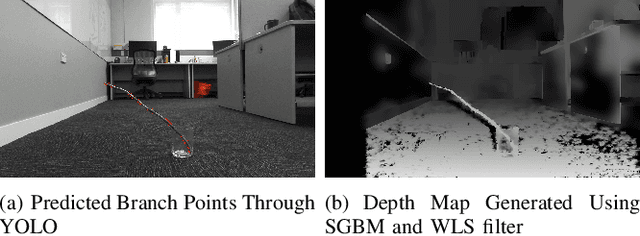
Manual pruning of radiata pine trees presents significant safety risks due to their substantial height and the challenging terrains in which they thrive. To address these risks, this research proposes the development of a drone-based pruning system equipped with specialized pruning tools and a stereo vision camera, enabling precise detection and trimming of branches. Deep learning algorithms, including YOLO and Mask R-CNN, are employed to ensure accurate branch detection, while the Semi-Global Matching algorithm is integrated to provide reliable distance estimation. The synergy between these techniques facilitates the precise identification of branch locations and enables efficient, targeted pruning. Experimental results demonstrate that the combined implementation of YOLO and SGBM enables the drone to accurately detect branches and measure their distances from the drone. This research not only improves the safety and efficiency of pruning operations but also makes a significant contribution to the advancement of drone technology in the automation of agricultural and forestry practices, laying a foundational framework for further innovations in environmental management.