Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBounded Exploration with World Model Uncertainty in Soft Actor-Critic Reinforcement Learning Algorithm
Paper and Code
Dec 09, 2024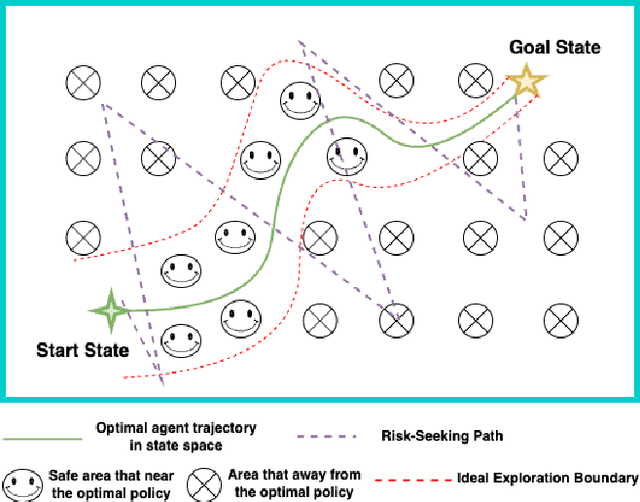
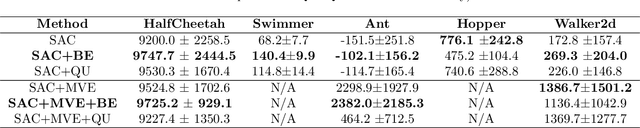
One of the bottlenecks preventing Deep Reinforcement Learning algorithms (DRL) from real-world applications is how to explore the environment and collect informative transitions efficiently. The present paper describes bounded exploration, a novel exploration method that integrates both 'soft' and intrinsic motivation exploration. Bounded exploration notably improved the Soft Actor-Critic algorithm's performance and its model-based extension's converging speed. It achieved the highest score in 6 out of 8 experiments. Bounded exploration presents an alternative method to introduce intrinsic motivations to exploration when the original reward function has strict meanings.
* ISBN: 978-0-6455655-2-2 ISSN: 1448-2053 * 8 pages, 7 figures. Accepted as a poster presentation in the
Australian Robotics and Automation Association (2023)
View paper on