 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSSCL-BW: Sample-Specific Clean-Label Backdoor Watermarking for Dataset Ownership Verification
Oct 30, 2025The rapid advancement of deep neural networks (DNNs) heavily relies on large-scale, high-quality datasets. However, unauthorized commercial use of these datasets severely violates the intellectual property rights of dataset owners. Existing backdoor-based dataset ownership verification methods suffer from inherent limitations: poison-label watermarks are easily detectable due to label inconsistencies, while clean-label watermarks face high technical complexity and failure on high-resolution images. Moreover, both approaches employ static watermark patterns that are vulnerable to detection and removal. To address these issues, this paper proposes a sample-specific clean-label backdoor watermarking (i.e., SSCL-BW). By training a U-Net-based watermarked sample generator, this method generates unique watermarks for each sample, fundamentally overcoming the vulnerability of static watermark patterns. The core innovation lies in designing a composite loss function with three components: target sample loss ensures watermark effectiveness, non-target sample loss guarantees trigger reliability, and perceptual similarity loss maintains visual imperceptibility. During ownership verification, black-box testing is employed to check whether suspicious models exhibit predefined backdoor behaviors. Extensive experiments on benchmark datasets demonstrate the effectiveness of the proposed method and its robustness against potential watermark removal attacks.
CertDW: Towards Certified Dataset Ownership Verification via Conformal Prediction
Jun 16, 2025



Deep neural networks (DNNs) rely heavily on high-quality open-source datasets (e.g., ImageNet) for their success, making dataset ownership verification (DOV) crucial for protecting public dataset copyrights. In this paper, we find existing DOV methods (implicitly) assume that the verification process is faithful, where the suspicious model will directly verify ownership by using the verification samples as input and returning their results. However, this assumption may not necessarily hold in practice and their performance may degrade sharply when subjected to intentional or unintentional perturbations. To address this limitation, we propose the first certified dataset watermark (i.e., CertDW) and CertDW-based certified dataset ownership verification method that ensures reliable verification even under malicious attacks, under certain conditions (e.g., constrained pixel-level perturbation). Specifically, inspired by conformal prediction, we introduce two statistical measures, including principal probability (PP) and watermark robustness (WR), to assess model prediction stability on benign and watermarked samples under noise perturbations. We prove there exists a provable lower bound between PP and WR, enabling ownership verification when a suspicious model's WR value significantly exceeds the PP values of multiple benign models trained on watermark-free datasets. If the number of PP values smaller than WR exceeds a threshold, the suspicious model is regarded as having been trained on the protected dataset. Extensive experiments on benchmark datasets verify the effectiveness of our CertDW method and its resistance to potential adaptive attacks. Our codes are at \href{https://github.com/NcepuQiaoTing/CertDW}{GitHub}.
Cert-SSB: Toward Certified Sample-Specific Backdoor Defense
Apr 30, 2025Deep neural networks (DNNs) are vulnerable to backdoor attacks, where an attacker manipulates a small portion of the training data to implant hidden backdoors into the model. The compromised model behaves normally on clean samples but misclassifies backdoored samples into the attacker-specified target class, posing a significant threat to real-world DNN applications. Currently, several empirical defense methods have been proposed to mitigate backdoor attacks, but they are often bypassed by more advanced backdoor techniques. In contrast, certified defenses based on randomized smoothing have shown promise by adding random noise to training and testing samples to counteract backdoor attacks. In this paper, we reveal that existing randomized smoothing defenses implicitly assume that all samples are equidistant from the decision boundary. However, it may not hold in practice, leading to suboptimal certification performance. To address this issue, we propose a sample-specific certified backdoor defense method, termed Cert-SSB. Cert-SSB first employs stochastic gradient ascent to optimize the noise magnitude for each sample, ensuring a sample-specific noise level that is then applied to multiple poisoned training sets to retrain several smoothed models. After that, Cert-SSB aggregates the predictions of multiple smoothed models to generate the final robust prediction. In particular, in this case, existing certification methods become inapplicable since the optimized noise varies across different samples. To conquer this challenge, we introduce a storage-update-based certification method, which dynamically adjusts each sample's certification region to improve certification performance. We conduct extensive experiments on multiple benchmark datasets, demonstrating the effectiveness of our proposed method. Our code is available at https://github.com/NcepuQiaoTing/Cert-SSB.
Bounded Exploration with World Model Uncertainty in Soft Actor-Critic Reinforcement Learning Algorithm
Dec 09, 2024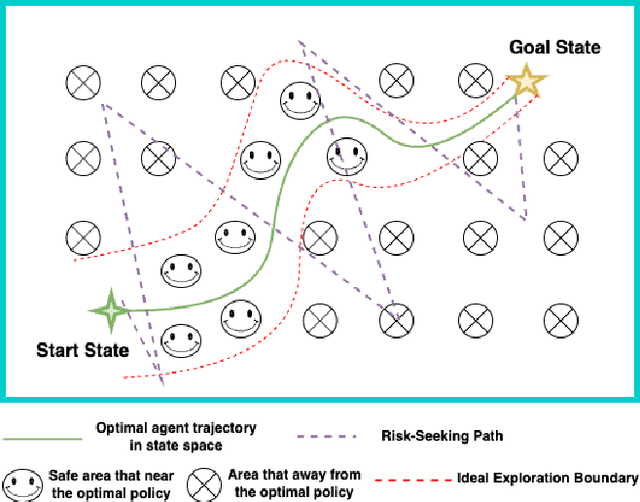
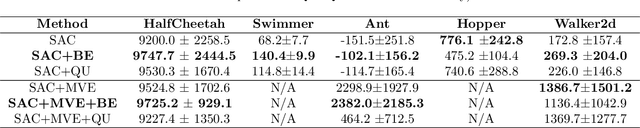
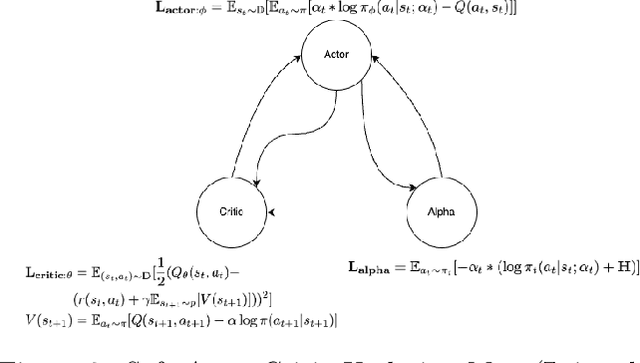
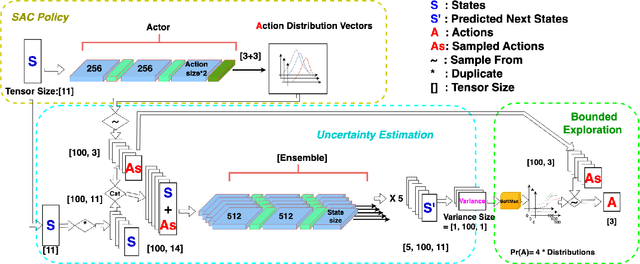
One of the bottlenecks preventing Deep Reinforcement Learning algorithms (DRL) from real-world applications is how to explore the environment and collect informative transitions efficiently. The present paper describes bounded exploration, a novel exploration method that integrates both 'soft' and intrinsic motivation exploration. Bounded exploration notably improved the Soft Actor-Critic algorithm's performance and its model-based extension's converging speed. It achieved the highest score in 6 out of 8 experiments. Bounded exploration presents an alternative method to introduce intrinsic motivations to exploration when the original reward function has strict meanings.
* 8 pages, 7 figures. Accepted as a poster presentation in the Australian Robotics and Automation Association (2023)