 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of a sensing module for a kiwifruit flower pollinator robot
Paper and Code
Jun 14, 2020

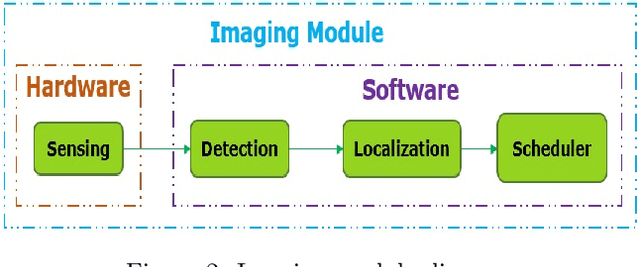

This paper describes steps taken to develop a sensing module for a robotic kiwifruit flower pollinator, which could be integrated into an imaging module and a spray module. The paper described different indicators to present the performance of the sensing module that can be used as a benchmark. The sensing module provides data for the imaging module to detect kiwifruit flower reliably and accurately in the canopy. Four major challenges for a sensing module is the speed, accuracy, visibility, and robustness to variable lighting conditions. Regarding these issues, Basler acA1920-40uc camera with an LM6HC lens were selected from a list of fast cameras and lenses based on different parameters. The sensing module was tested in four orchards and captured 9128 images. According to the saturation rate parameter, the captured images were typical in 96% of conditions and the rest were glare due to the sunny weather and early season. The camera speed and field of view guarantee that in the highest speed of the robot a flower can be seen at least in three images in normal conditions. The sensing module was calibrated with less than 3 mm error and integrated to the spray module. The pollinator module was mounted on a robot and tested in the real world and achieved 79.5% hit rate at an average velocity of 3.5 km/h.