 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Deepfake Detection, NTIRE 2026 Challenge: Report
Apr 27, 2026Robustness is a long-overlooked problem in deepfake detection. However, detection performance is nearly worthless in the real world if it suffers under exposure to even slight image degradation. In addition to weaker degradations that can accidentally occur in the image processing pipeline, there is another risk of malicious deepfakes that specifically introduce degradations, purposefully exploiting the detector's weaknesses in that regard. Here, we present an overview of the NTIRE 2026 Robust Deepfake Detection Challenge, which specifically addresses that problem. Participants were tasked with building a detector that would later be tested on an unknown test-set, which included both common and uncommon degradations of various strengths. With a total number of 337 participants and 57 submissions to the final leaderboard, the first edition of the challenge was well received. To ensure the reliability of the results, participants were given only 24h to complete the test run with no labels provided, limiting the possibility of training on the test data. Furthermore, the top solutions were scored on a private test-set to detect any such overfitting. This report presents the competition setting, dataset preparation, as well as details and performance of methods. Top methods rely on large foundation models, ensembles, and degradation training to combine generality and robustness.
Trust-SSL: Additive-Residual Selective Invariance for Robust Aerial Self-Supervised Learning
Apr 23, 2026Self-supervised learning (SSL) is a standard approach for representation learning in aerial imagery. Existing methods enforce invariance between augmented views, which works well when augmentations preserve semantic content. However, aerial images are frequently degraded by haze, motion blur, rain, and occlusion that remove critical evidence. Enforcing alignment between a clean and a severely degraded view can introduce spurious structure into the latent space. This study proposes a training strategy and architectural modification to enhance SSL robustness to such corruptions. It introduces a per-sample, per-factor trust weight into the alignment objective, combined with the base contrastive loss as an additive residual. A stop-gradient is applied to the trust weight instead of a multiplicative gate. While a multiplicative gate is a natural choice, experiments show it impairs the backbone, whereas our additive-residual approach improves it. Using a 200-epoch protocol on a 210,000-image corpus, the method achieves the highest mean linear-probe accuracy among six backbones on EuroSAT, AID, and NWPU-RESISC45 (90.20% compared to 88.46% for SimCLR and 89.82% for VICReg). It yields the largest improvements under severe information-erasing corruptions on EuroSAT (+19.9 points on haze at s=5 over SimCLR). The method also demonstrates consistent gains of +1 to +3 points in Mahalanobis AUROC on a zero-shot cross-domain stress test using BDD100K weather splits. Two ablations (scalar uncertainty and cosine gate) indicate the additive-residual formulation is the primary source of these improvements. An evidential variant using Dempster-Shafer fusion introduces interpretable signals of conflict and ignorance. These findings offer a concrete design principle for uncertainty-aware SSL. Code is publicly available at https://github.com/WadiiBoulila/trust-ssl.
Low Light Image Enhancement Challenge at NTIRE 2026
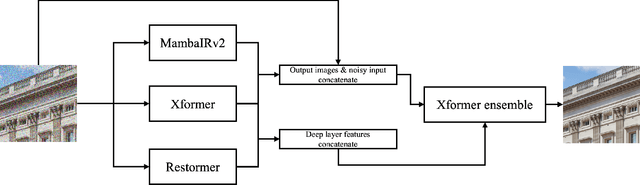
Apr 19, 2026This paper presents a comprehensive review of the NTIRE 2026 Low Light Image Enhancement Challenge, highlighting the proposed solutions and final results. The objective of this challenge is to identify effective networks capable of producing clearer and visually compelling images in diverse and challenging conditions by learning representative visual cues with the purpose of restoring information loss due to low-contrast and noisy images. A total of 195 participants registered for the first track and 153 for the second track of the competition, and 22 teams ultimately submitted valid entries. This paper thoroughly evaluates the state-of-the-art advances in (joint denoising and) low-light image enhancement, showcasing the significant progress in the field, while leveraging samples of our novel dataset.
The Fourth Challenge on Image Super-Resolution ($\times$4) at NTIRE 2026: Benchmark Results and Method Overview
Apr 16, 2026This paper presents the NTIRE 2026 image super-resolution ($\times$4) challenge, one of the associated competitions of the NTIRE 2026 Workshop at CVPR 2026. The challenge aims to reconstruct high-resolution (HR) images from low-resolution (LR) inputs generated through bicubic downsampling with a $\times$4 scaling factor. The objective is to develop effective super-resolution solutions and analyze recent advances in the field. To reflect the evolving objectives of image super-resolution, the challenge includes two tracks: (1) a restoration track, which emphasizes pixel-wise fidelity and ranks submissions based on PSNR; and (2) a perceptual track, which focuses on visual realism and evaluates results using a perceptual score. A total of 194 participants registered for the challenge, with 31 teams submitting valid entries. This report summarizes the challenge design, datasets, evaluation protocol, main results, and methods of participating teams. The challenge provides a unified benchmark and offers insights into current progress and future directions in image super-resolution.
NTIRE 2026 Challenge on Robust AI-Generated Image Detection in the Wild
Apr 13, 2026This paper presents an overview of the NTIRE 2026 Challenge on Robust AI-Generated Image Detection in the Wild, held in conjunction with the NTIRE workshop at CVPR 2026. The goal of this challenge was to develop detection models capable of distinguishing real images from generated ones in realistic scenarios: the images are often transformed (cropped, resized, compressed, blurred) for practical usage, and therefore, the detection models should be robust to such transformations. The challenge is based on a novel dataset consisting of 108,750 real and 185,750 AI-generated images from 42 generators comprising a large variety of open-source and closed-source models of various architectures, augmented with 36 image transformations. Methods were evaluated using ROC AUC on the full test set, including both transformed and untransformed images. A total of 511 participants registered, with 20 teams submitting valid final solutions. This report provides a comprehensive overview of the challenge, describes the proposed solutions, and can be used as a valuable reference for researchers and practitioners in increasing the robustness of the detection models to real-world transformations.
NTIRE 2026 The Second Challenge on Day and Night Raindrop Removal for Dual-Focused Images: Methods and Results
Apr 12, 2026This paper presents an overview of the NTIRE 2026 Second Challenge on Day and Night Raindrop Removal for Dual-Focused Images. Building upon the success of the first edition, this challenge attracted a wide range of impressive solutions, all developed and evaluated on our real-world Raindrop Clarity dataset~\cite{jin2024raindrop}. For this edition, we adjust the dataset with 14,139 images for training, 407 images for validation, and 593 images for testing. The primary goal of this challenge is to establish a strong and practical benchmark for the removal of raindrops under various illumination and focus conditions. In total, 168 teams have registered for the competition, and 17 teams submitted valid final solutions and fact sheets for the testing phase. The submitted methods achieved strong performance on the Raindrop Clarity dataset, demonstrating the growing progress in this challenging task.
NTIRE 2026 Challenge on Single Image Reflection Removal in the Wild: Datasets, Results, and Methods
Apr 11, 2026In this paper, we review the NTIRE 2026 challenge on single-image reflection removal (SIRR) in the Wild. SIRR is a fundamental task in image restoration. Despite progress in academic research, most methods are tested on synthetic images or limited real-world images, creating a gap in real-world applications. In this challenge, we provide participants with the OpenRR-5k dataset, which requires them to process real-world images that cover a range of reflection scenarios and intensities, with the goal of generating clean images without reflections. The challenge attracted more than 100 registrations, with 11 of them participating in the final testing phase. The top-ranked methods advanced the state-of-the-art reflection removal performance and earned unanimous recognition from the five experts in the field. The proposed OpenRR-5k dataset is available at https://huggingface.co/datasets/qiuzhangTiTi/OpenRR-5k, and the homepage of this challenge is at https://github.com/caijie0620/OpenRR-5k. Due to page limitations, this article only presents partial content; the full report and detailed analyses are available in the extended arXiv version.
NTIRE 2025 Image Shadow Removal Challenge Report
Jun 18, 2025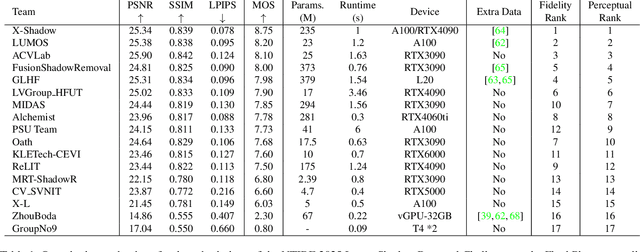

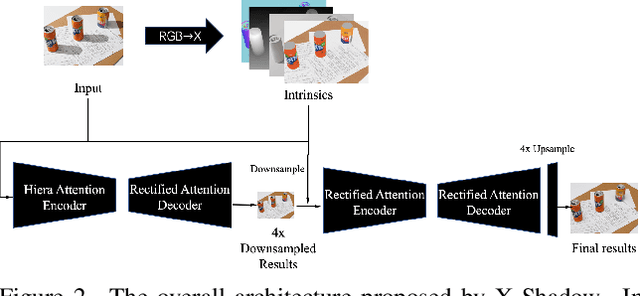
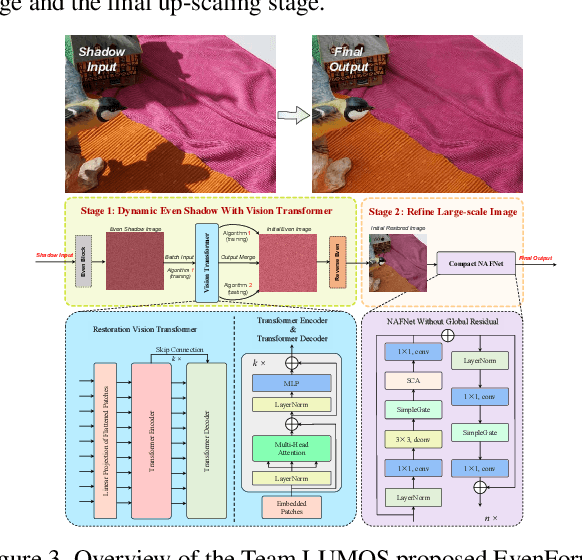
This work examines the findings of the NTIRE 2025 Shadow Removal Challenge. A total of 306 participants have registered, with 17 teams successfully submitting their solutions during the final evaluation phase. Following the last two editions, this challenge had two evaluation tracks: one focusing on reconstruction fidelity and the other on visual perception through a user study. Both tracks were evaluated with images from the WSRD+ dataset, simulating interactions between self- and cast-shadows with a large number of diverse objects, textures, and materials.
NTIRE 2025 Challenge on Image Super-Resolution ($\times$4): Methods and Results
Apr 20, 2025This paper presents the NTIRE 2025 image super-resolution ($\times$4) challenge, one of the associated competitions of the 10th NTIRE Workshop at CVPR 2025. The challenge aims to recover high-resolution (HR) images from low-resolution (LR) counterparts generated through bicubic downsampling with a $\times$4 scaling factor. The objective is to develop effective network designs or solutions that achieve state-of-the-art SR performance. To reflect the dual objectives of image SR research, the challenge includes two sub-tracks: (1) a restoration track, emphasizes pixel-wise accuracy and ranks submissions based on PSNR; (2) a perceptual track, focuses on visual realism and ranks results by a perceptual score. A total of 286 participants registered for the competition, with 25 teams submitting valid entries. This report summarizes the challenge design, datasets, evaluation protocol, the main results, and methods of each team. The challenge serves as a benchmark to advance the state of the art and foster progress in image SR.
The Tenth NTIRE 2025 Image Denoising Challenge Report
Apr 16, 2025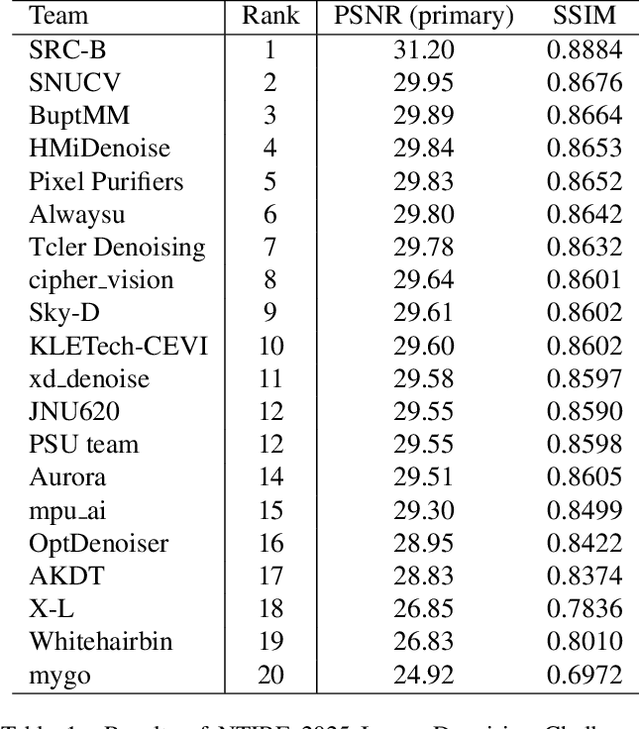


This paper presents an overview of the NTIRE 2025 Image Denoising Challenge ({\sigma} = 50), highlighting the proposed methodologies and corresponding results. The primary objective is to develop a network architecture capable of achieving high-quality denoising performance, quantitatively evaluated using PSNR, without constraints on computational complexity or model size. The task assumes independent additive white Gaussian noise (AWGN) with a fixed noise level of 50. A total of 290 participants registered for the challenge, with 20 teams successfully submitting valid results, providing insights into the current state-of-the-art in image denoising.