 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNTIRE 2025 Image Shadow Removal Challenge Report
Jun 18, 2025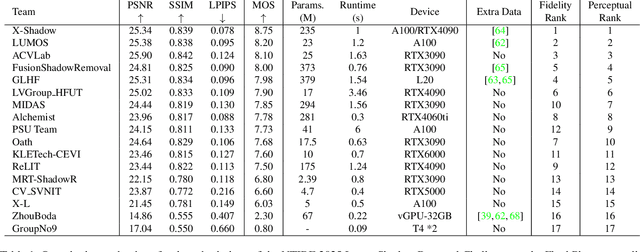

This work examines the findings of the NTIRE 2025 Shadow Removal Challenge. A total of 306 participants have registered, with 17 teams successfully submitting their solutions during the final evaluation phase. Following the last two editions, this challenge had two evaluation tracks: one focusing on reconstruction fidelity and the other on visual perception through a user study. Both tracks were evaluated with images from the WSRD+ dataset, simulating interactions between self- and cast-shadows with a large number of diverse objects, textures, and materials.
NTIRE 2025 Challenge on Image Super-Resolution ($\times$4): Methods and Results
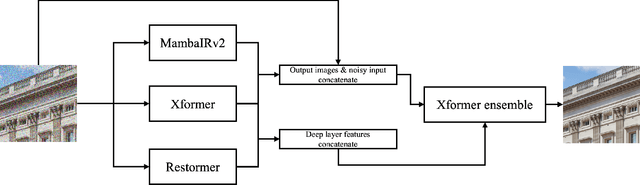
Apr 20, 2025This paper presents the NTIRE 2025 image super-resolution ($\times$4) challenge, one of the associated competitions of the 10th NTIRE Workshop at CVPR 2025. The challenge aims to recover high-resolution (HR) images from low-resolution (LR) counterparts generated through bicubic downsampling with a $\times$4 scaling factor. The objective is to develop effective network designs or solutions that achieve state-of-the-art SR performance. To reflect the dual objectives of image SR research, the challenge includes two sub-tracks: (1) a restoration track, emphasizes pixel-wise accuracy and ranks submissions based on PSNR; (2) a perceptual track, focuses on visual realism and ranks results by a perceptual score. A total of 286 participants registered for the competition, with 25 teams submitting valid entries. This report summarizes the challenge design, datasets, evaluation protocol, the main results, and methods of each team. The challenge serves as a benchmark to advance the state of the art and foster progress in image SR.
The Tenth NTIRE 2025 Image Denoising Challenge Report
Apr 16, 2025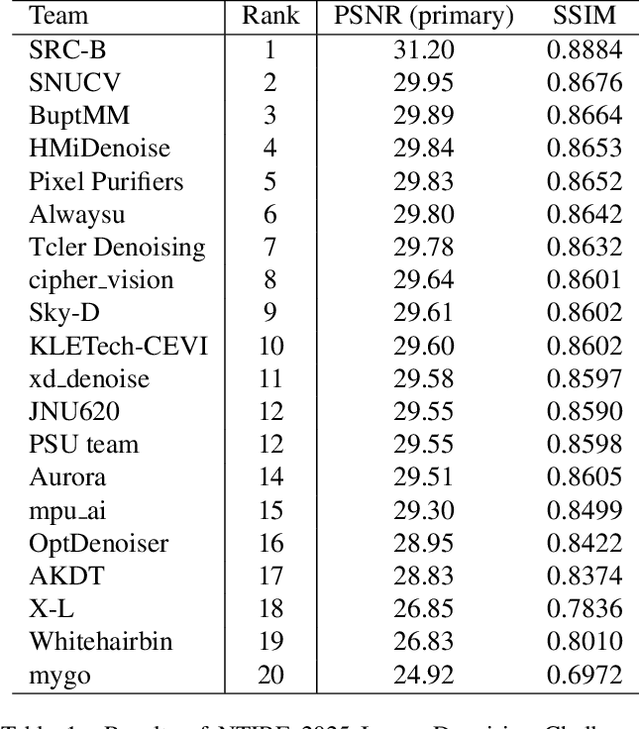


This paper presents an overview of the NTIRE 2025 Image Denoising Challenge ({\sigma} = 50), highlighting the proposed methodologies and corresponding results. The primary objective is to develop a network architecture capable of achieving high-quality denoising performance, quantitatively evaluated using PSNR, without constraints on computational complexity or model size. The task assumes independent additive white Gaussian noise (AWGN) with a fixed noise level of 50. A total of 290 participants registered for the challenge, with 20 teams successfully submitting valid results, providing insights into the current state-of-the-art in image denoising.
License Plate Super-Resolution Using Diffusion Models
Sep 21, 2023



In surveillance, accurately recognizing license plates is hindered by their often low quality and small dimensions, compromising recognition precision. Despite advancements in AI-based image super-resolution, methods like Convolutional Neural Networks (CNNs) and Generative Adversarial Networks (GANs) still fall short in enhancing license plate images. This study leverages the cutting-edge diffusion model, which has consistently outperformed other deep learning techniques in image restoration. By training this model using a curated dataset of Saudi license plates, both in low and high resolutions, we discovered the diffusion model's superior efficacy. The method achieves a 12.55\% and 37.32% improvement in Peak Signal-to-Noise Ratio (PSNR) over SwinIR and ESRGAN, respectively. Moreover, our method surpasses these techniques in terms of Structural Similarity Index (SSIM), registering a 4.89% and 17.66% improvement over SwinIR and ESRGAN, respectively. Furthermore, 92% of human evaluators preferred our images over those from other algorithms. In essence, this research presents a pioneering solution for license plate super-resolution, with tangible potential for surveillance systems.
ROSGPT_Vision: Commanding Robots Using Only Language Models' Prompts
Aug 23, 2023In this paper, we argue that the next generation of robots can be commanded using only Language Models' prompts. Every prompt interrogates separately a specific Robotic Modality via its Modality Language Model (MLM). A central Task Modality mediates the whole communication to execute the robotic mission via a Large Language Model (LLM). This paper gives this new robotic design pattern the name of: Prompting Robotic Modalities (PRM). Moreover, this paper applies this PRM design pattern in building a new robotic framework named ROSGPT_Vision. ROSGPT_Vision allows the execution of a robotic task using only two prompts: a Visual and an LLM prompt. The Visual Prompt extracts, in natural language, the visual semantic features related to the task under consideration (Visual Robotic Modality). Meanwhile, the LLM Prompt regulates the robotic reaction to the visual description (Task Modality). The framework automates all the mechanisms behind these two prompts. The framework enables the robot to address complex real-world scenarios by processing visual data, making informed decisions, and carrying out actions automatically. The framework comprises one generic vision module and two independent ROS nodes. As a test application, we used ROSGPT_Vision to develop CarMate, which monitors the driver's distraction on the roads and makes real-time vocal notifications to the driver. We showed how ROSGPT_Vision significantly reduced the development cost compared to traditional methods. We demonstrated how to improve the quality of the application by optimizing the prompting strategies, without delving into technical details. ROSGPT_Vision is shared with the community (link: https://github.com/bilel-bj/ROSGPT_Vision) to advance robotic research in this direction and to build more robotic frameworks that implement the PRM design pattern and enables controlling robots using only prompts.
Streamlined Global and Local Features Combinator (SGLC) for High Resolution Image Dehazing
Apr 26, 2023



Image Dehazing aims to remove atmospheric fog or haze from an image. Although the Dehazing models have evolved a lot in recent years, few have precisely tackled the problem of High-Resolution hazy images. For this kind of image, the model needs to work on a downscaled version of the image or on cropped patches from it. In both cases, the accuracy will drop. This is primarily due to the inherent failure to combine global and local features when the image size increases. The Dehazing model requires global features to understand the general scene peculiarities and the local features to work better with fine and pixel details. In this study, we propose the Streamlined Global and Local Features Combinator (SGLC) to solve these issues and to optimize the application of any Dehazing model to High-Resolution images. The SGLC contains two successive blocks. The first is the Global Features Generator (GFG) which generates the first version of the Dehazed image containing strong global features. The second block is the Local Features Enhancer (LFE) which improves the local feature details inside the previously generated image. When tested on the Uformer architecture for Dehazing, SGLC increased the PSNR metric by a significant margin. Any other model can be incorporated inside the SGLC process to improve its efficiency on High-Resolution input data.