 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust width: A lightweight and certifiable adversarial defense
May 24, 2024Deep neural networks are vulnerable to so-called adversarial examples: inputs which are intentionally constructed to cause the model to make incorrect predictions or classifications. Adversarial examples are often visually indistinguishable from natural data samples, making them hard to detect. As such, they pose significant threats to the reliability of deep learning systems. In this work, we study an adversarial defense based on the robust width property (RWP), which was recently introduced for compressed sensing. We show that a specific input purification scheme based on the RWP gives theoretical robustness guarantees for images that are approximately sparse. The defense is easy to implement and can be applied to any existing model without additional training or finetuning. We empirically validate the defense on ImageNet against $L^\infty$ perturbations at perturbation budgets ranging from $4/255$ to $32/255$. In the black-box setting, our method significantly outperforms the state-of-the-art, especially for large perturbations. In the white-box setting, depending on the choice of base classifier, we closely match the state of the art in robust ImageNet classification while avoiding the need for additional data, larger models or expensive adversarial training routines. Our code is available at https://github.com/peck94/robust-width-defense.
BotanicGarden: A high-quality and large-scale robot navigation dataset in challenging natural environments
Jun 25, 2023



The rapid developments of mobile robotics and autonomous navigation over the years are largely empowered by public datasets for testing and upgrading, such as SLAM and localization tasks. Impressive demos and benchmark results have arisen, indicating the establishment of a mature technical framework. However, from the view point of real-world deployments, there are still critical defects of robustness in challenging environments, especially in large-scale, GNSS-denied, textural-monotonous, and unstructured scenarios. To meet the pressing validation demands in such scope, we build a novel challenging robot navigation dataset in a large botanic garden of more than 48000m2. Comprehensive sensors are employed, including high-res/rate stereo Gray&RGB cameras, rotational and forward 3D LiDARs, and low-cost and industrial-grade IMUs, all of which are well calibrated and accurately hardware-synchronized. An all-terrain wheeled robot is configured to mount the sensor suite and provide odometry data. A total of 32 long and short sequences of 2.3 million images are collected, covering scenes of thick woods, riversides, narrow paths, bridges, and grasslands that rarely appeared in previous resources. Excitedly, both highly-accurate ego-motions and 3D map ground truth are provided, along with fine-annotated vision semantics. Our goal is to contribute a high-quality dataset to advance robot navigation and sensor fusion research to a higher level.
Resolution based Feature Distillation for Cross Resolution Person Re-Identification
Sep 16, 2021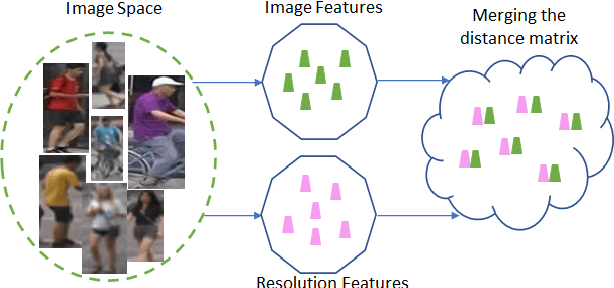
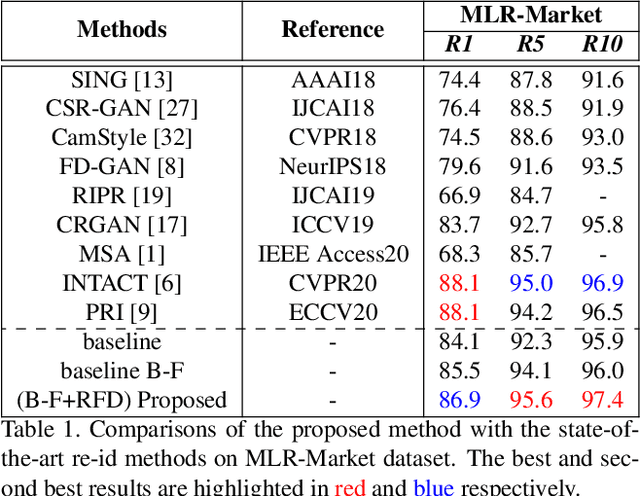
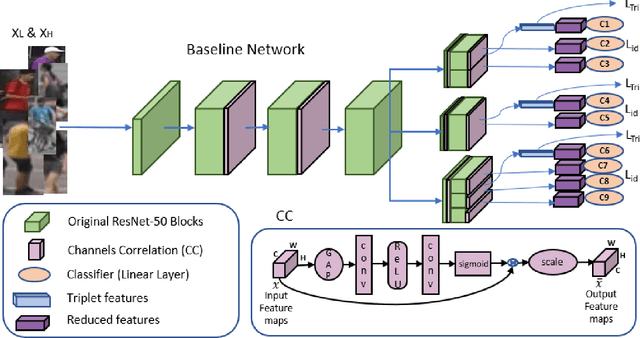
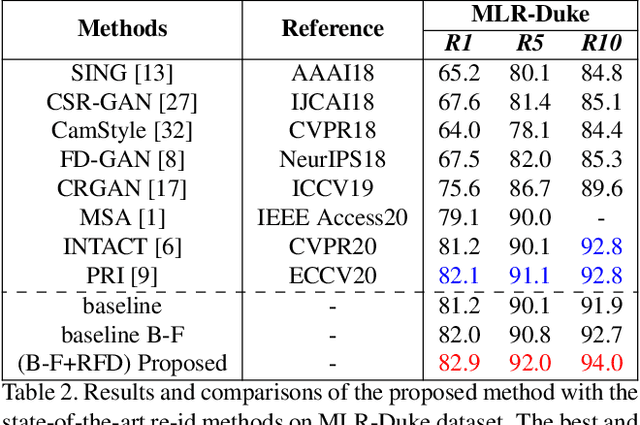
Person re-identification (re-id) aims to retrieve images of same identities across different camera views. Resolution mismatch occurs due to varying distances between person of interest and cameras, this significantly degrades the performance of re-id in real world scenarios. Most of the existing approaches resolve the re-id task as low resolution problem in which a low resolution query image is searched in a high resolution images gallery. Several approaches apply image super resolution techniques to produce high resolution images but ignore the multiple resolutions of gallery images which is a better realistic scenario. In this paper, we introduce channel correlations to improve the learning of features from the degraded data. In addition, to overcome the problem of multiple resolutions we propose a Resolution based Feature Distillation (RFD) approach. Such an approach learns resolution invariant features by filtering the resolution related features from the final feature vectors that are used to compute the distance matrix. We tested the proposed approach on two synthetically created datasets and on one original multi resolution dataset with real degradation. Our approach improves the performance when multiple resolutions occur in the gallery and have comparable results in case of single resolution (low resolution re-id).
Datasets and Evaluation for Simultaneous Localization and Mapping Related Problems: A Comprehensive Survey
Feb 08, 2021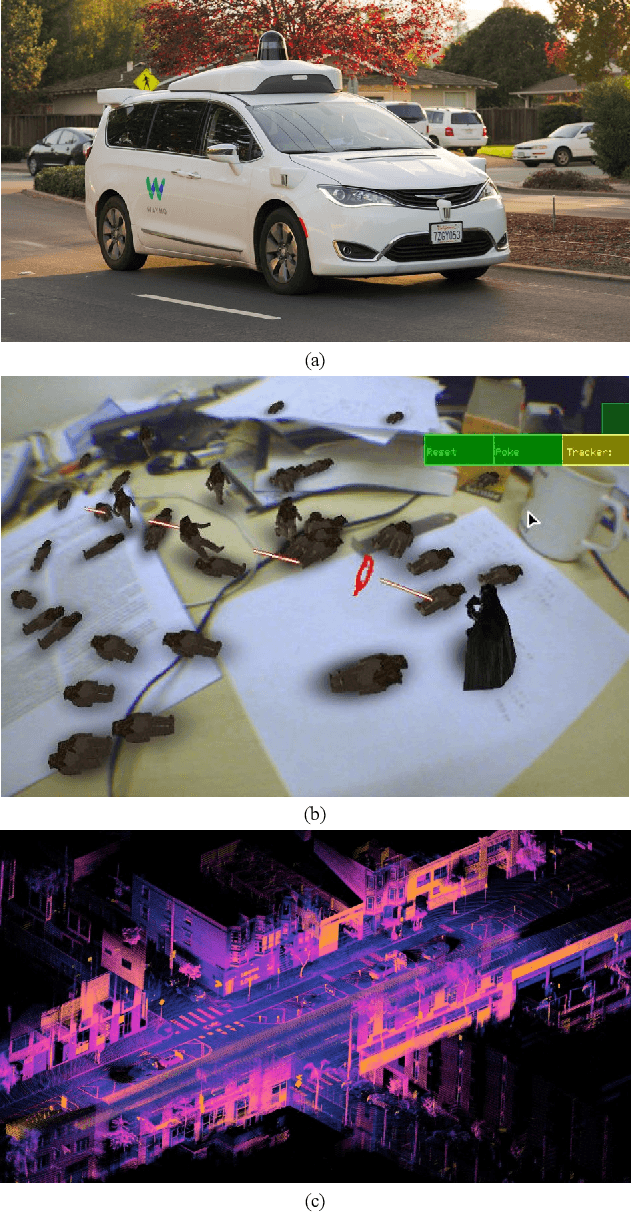
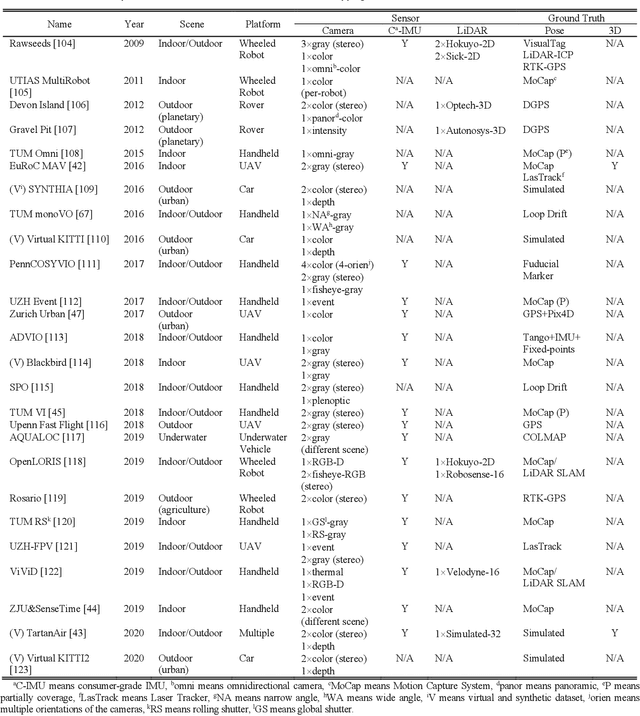
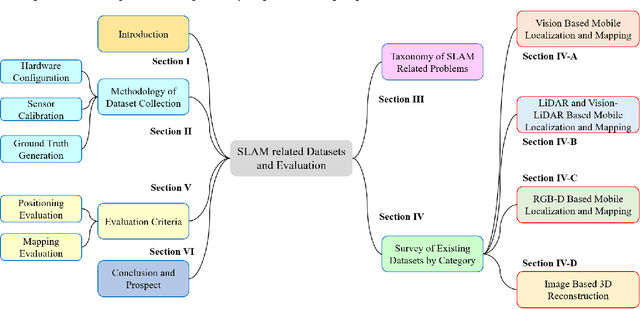
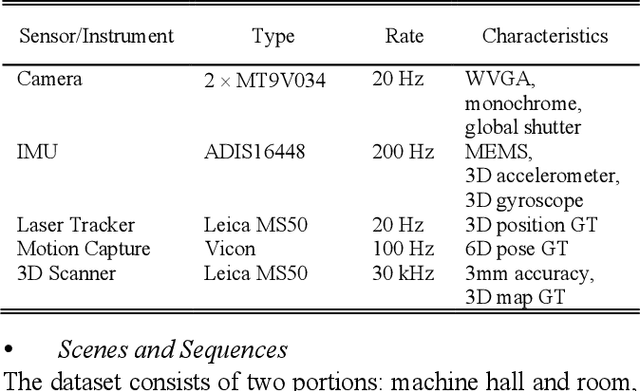
Simultaneous Localization and Mapping (SLAM) has found an increasing utilization lately, such as self-driving cars, robot navigation, 3D mapping, virtual reality (VR) and augmented reality (AR), etc., empowering both industry and daily life. Although the state-of-the-art algorithms where developers have spared no effort are source of intelligence, it is the datasets that dedicate behind and raise us higher. The employment of datasets is essentially a kind of simulation but profits many aspects - capacity of drilling algorithm hourly, exemption of costly hardware and ground truth system, and equitable benchmark for evaluation. However, as a branch of great significance, still the datasets have not drawn wide attention nor been reviewed thoroughly. Hence in this article, we strive to give a comprehensive and open access review of SLAM related datasets and evaluation, which are scarcely surveyed while highly demanded by researchers and engineers, looking forward to serving as not only a dictionary but also a development proposal. The paper starts with the methodology of dataset collection, and a taxonomy of SLAM related tasks. Then followed with the main portion - comprehensively survey the existing SLAM related datasets by category with our considerate introductions and insights. Furthermore, we talk about the evaluation criteria, which are necessary to quantify the algorithm performance on the dataset and inspect the defects. At the end, we summarize the weakness of datasets and evaluation - which could well result in the weakness of topical algorithms - to promote bridging the gap fundamentally.
Regional Image Perturbation Reduces $L_p$ Norms of Adversarial Examples While Maintaining Model-to-model Transferability
Jul 07, 2020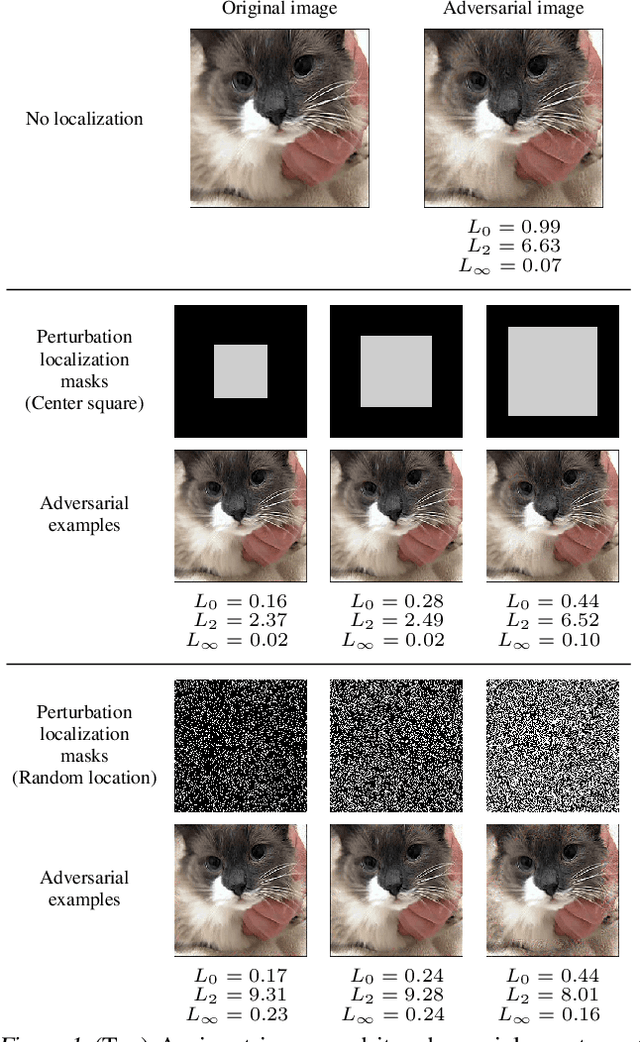
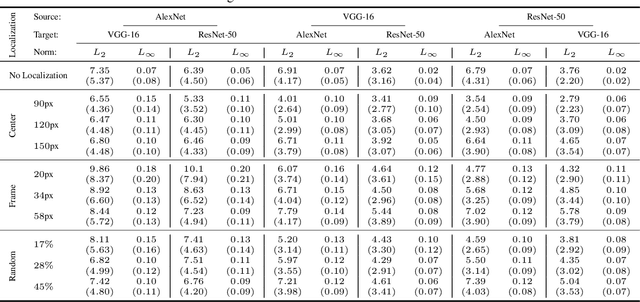
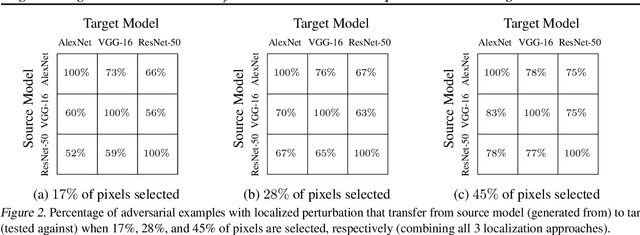
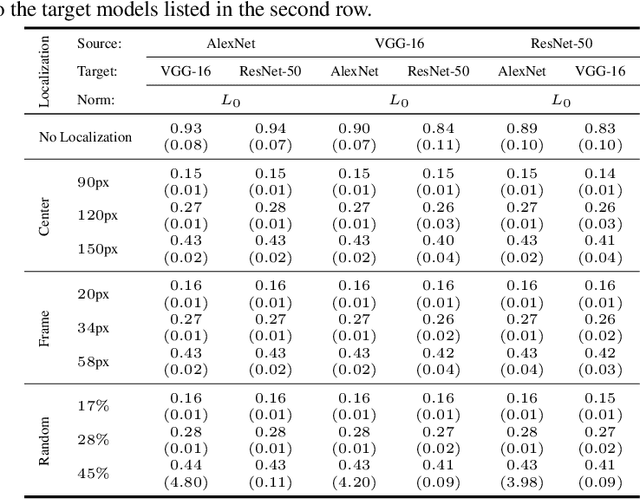
Regional adversarial attacks often rely on complicated methods for generating adversarial perturbations, making it hard to compare their efficacy against well-known attacks. In this study, we show that effective regional perturbations can be generated without resorting to complex methods. We develop a very simple regional adversarial perturbation attack method using cross-entropy sign, one of the most commonly used losses in adversarial machine learning. Our experiments on ImageNet with multiple models reveal that, on average, $76\%$ of the generated adversarial examples maintain model-to-model transferability when the perturbation is applied to local image regions. Depending on the selected region, these localized adversarial examples require significantly less $L_p$ norm distortion (for $p \in \{0, 2, \infty\}$) compared to their non-local counterparts. These localized attacks therefore have the potential to undermine defenses that claim robustness under the aforementioned norms.