 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGood SFT Optimizes for SFT, Better SFT Prepares for Reinforcement Learning
Feb 01, 2026Post-training of reasoning LLMs is a holistic process that typically consists of an offline SFT stage followed by an online reinforcement learning (RL) stage. However, SFT is often optimized in isolation to maximize SFT performance alone. We show that, after identical RL training, models initialized from stronger SFT checkpoints can significantly underperform those initialized from weaker ones. We attribute this to a mismatch typical in current SFT-RL pipelines: the distribution that generates the offline SFT data can differ substantially from the policy optimized during online RL, which learns from its own rollouts. We propose PEAR (Policy Evaluation-inspired Algorithm for Offline Learning Loss Re-weighting), an SFT-stage method that corrects this mismatch and better prepares the model for RL. PEAR uses importance sampling to reweight the SFT loss, with three variants operating at the token, block, and sequence levels. It can be used to augment standard SFT objectives and incurs little additional training overhead once probabilities for the offline data are collected. We conduct controlled experiments on verifiable reasoning games and mathematical reasoning tasks on Qwen 2.5 and 3 and DeepSeek-distilled models. PEAR consistently improves post-RL performance over canonical SFT, with pass at 8 gains up to a 14.6 percent on AIME2025. Our results suggest that PEAR is an effective step toward more holistic LLM post-training by designing and evaluating SFT with downstream RL in mind rather than in isolation.
Tokensome: Towards a Genetic Vision-Language GPT for Explainable and Cognitive Karyotyping
Mar 17, 2024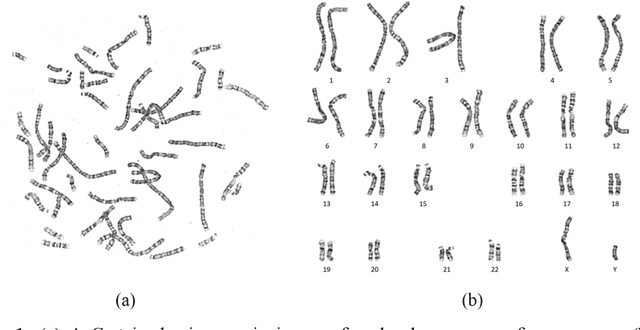

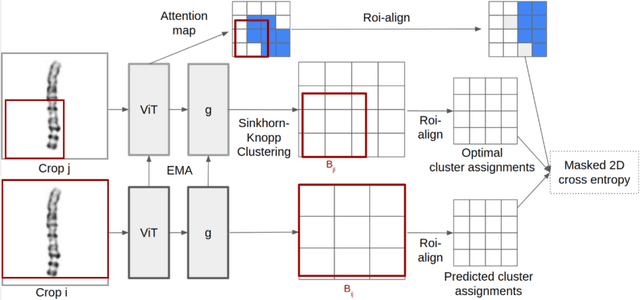

Automatic karyotype analysis is often defined as a visual perception task focused solely on chromosomal object-level modeling. This definition has led most existing methods to overlook componential and holistic information, significantly constraining model performance. Moreover, the lack of interpretability in current technologies hinders clinical adoption. In this paper, we introduce Tokensome, a novel vision-language model based on chromosome tokenization for explainable and cognitive karyotyping. Tokensome elevates the method from the conventional visual perception layer to the cognitive decision-making layer. This elevation enables the integration of domain knowledge and cognitive reasoning via knowledge graphs and LLMs, markedly enhancing model's explainability and facilitating abnormality detection.
Cross Entropy versus Label Smoothing: A Neural Collapse Perspective
Feb 07, 2024Label smoothing loss is a widely adopted technique to mitigate overfitting in deep neural networks. This paper studies label smoothing from the perspective of Neural Collapse (NC), a powerful empirical and theoretical framework which characterizes model behavior during the terminal phase of training. We first show empirically that models trained with label smoothing converge faster to neural collapse solutions and attain a stronger level of neural collapse. Additionally, we show that at the same level of NC1, models under label smoothing loss exhibit intensified NC2. These findings provide valuable insights into the performance benefits and enhanced model calibration under label smoothing loss. We then leverage the unconstrained feature model to derive closed-form solutions for the global minimizers for both loss functions and further demonstrate that models under label smoothing have a lower conditioning number and, therefore, theoretically converge faster. Our study, combining empirical evidence and theoretical results, not only provides nuanced insights into the differences between label smoothing and cross-entropy losses, but also serves as an example of how the powerful neural collapse framework can be used to improve our understanding of DNNs.
BotanicGarden: A high-quality and large-scale robot navigation dataset in challenging natural environments
Jun 25, 2023



The rapid developments of mobile robotics and autonomous navigation over the years are largely empowered by public datasets for testing and upgrading, such as SLAM and localization tasks. Impressive demos and benchmark results have arisen, indicating the establishment of a mature technical framework. However, from the view point of real-world deployments, there are still critical defects of robustness in challenging environments, especially in large-scale, GNSS-denied, textural-monotonous, and unstructured scenarios. To meet the pressing validation demands in such scope, we build a novel challenging robot navigation dataset in a large botanic garden of more than 48000m2. Comprehensive sensors are employed, including high-res/rate stereo Gray&RGB cameras, rotational and forward 3D LiDARs, and low-cost and industrial-grade IMUs, all of which are well calibrated and accurately hardware-synchronized. An all-terrain wheeled robot is configured to mount the sensor suite and provide odometry data. A total of 32 long and short sequences of 2.3 million images are collected, covering scenes of thick woods, riversides, narrow paths, bridges, and grasslands that rarely appeared in previous resources. Excitedly, both highly-accurate ego-motions and 3D map ground truth are provided, along with fine-annotated vision semantics. Our goal is to contribute a high-quality dataset to advance robot navigation and sensor fusion research to a higher level.