 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCG-fusion CAM: Online segmentation of laser-induced damage on large-aperture optics
Jul 18, 2023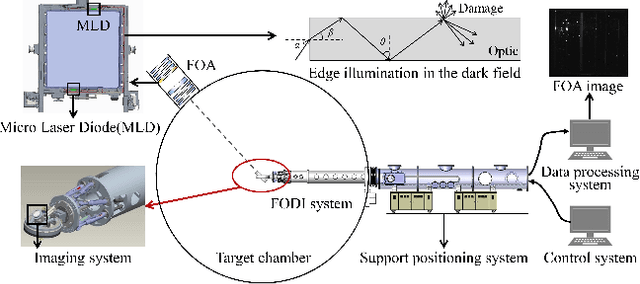
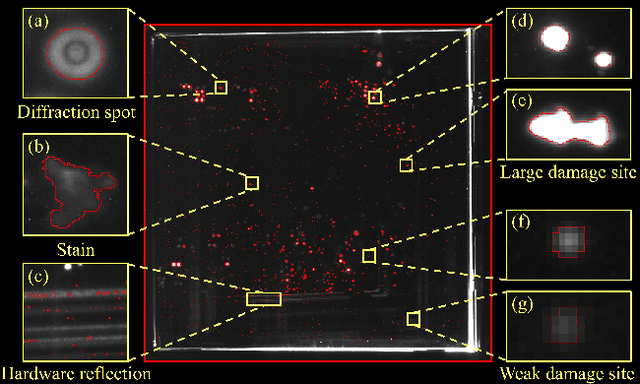
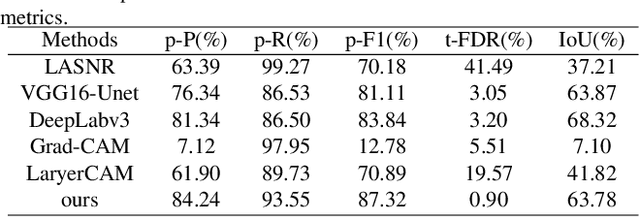
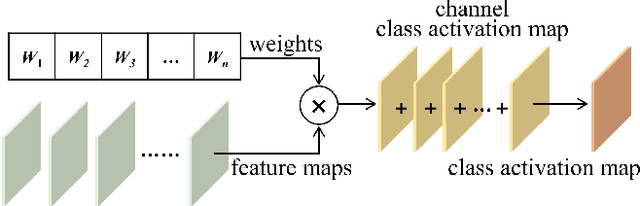
Online segmentation of laser-induced damage on large-aperture optics in high-power laser facilities is challenged by complicated damage morphology, uneven illumination and stray light interference. Fully supervised semantic segmentation algorithms have achieved state-of-the-art performance, but rely on plenty of pixel-level labels, which are time-consuming and labor-consuming to produce. LayerCAM, an advanced weakly supervised semantic segmentation algorithm, can generate pixel-accurate results using only image-level labels, but its scattered and partially under-activated class activation regions degrade segmentation performance. In this paper, we propose a weakly supervised semantic segmentation method with Continuous Gradient CAM and its nonlinear multi-scale fusion (CG-fusion CAM). The method redesigns the way of back-propagating gradients and non-linearly activates the multi-scale fused heatmaps to generate more fine-grained class activation maps with appropriate activation degree for different sizes of damage sites. Experiments on our dataset show that the proposed method can achieve segmentation performance comparable to that of fully supervised algorithms.
BotanicGarden: A high-quality and large-scale robot navigation dataset in challenging natural environments
Jun 25, 2023



The rapid developments of mobile robotics and autonomous navigation over the years are largely empowered by public datasets for testing and upgrading, such as SLAM and localization tasks. Impressive demos and benchmark results have arisen, indicating the establishment of a mature technical framework. However, from the view point of real-world deployments, there are still critical defects of robustness in challenging environments, especially in large-scale, GNSS-denied, textural-monotonous, and unstructured scenarios. To meet the pressing validation demands in such scope, we build a novel challenging robot navigation dataset in a large botanic garden of more than 48000m2. Comprehensive sensors are employed, including high-res/rate stereo Gray&RGB cameras, rotational and forward 3D LiDARs, and low-cost and industrial-grade IMUs, all of which are well calibrated and accurately hardware-synchronized. An all-terrain wheeled robot is configured to mount the sensor suite and provide odometry data. A total of 32 long and short sequences of 2.3 million images are collected, covering scenes of thick woods, riversides, narrow paths, bridges, and grasslands that rarely appeared in previous resources. Excitedly, both highly-accurate ego-motions and 3D map ground truth are provided, along with fine-annotated vision semantics. Our goal is to contribute a high-quality dataset to advance robot navigation and sensor fusion research to a higher level.
How to Explain Neural Networks: A perspective of data space division
May 17, 2021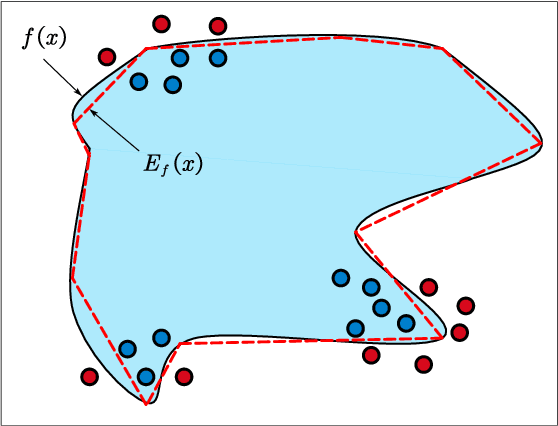
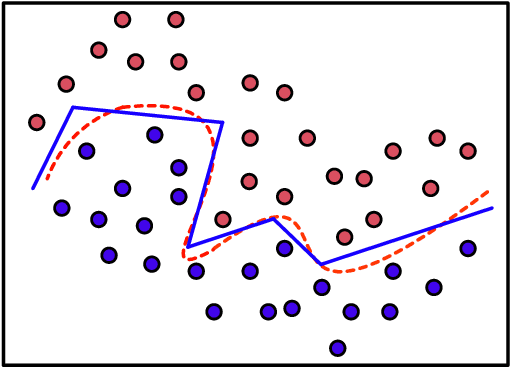
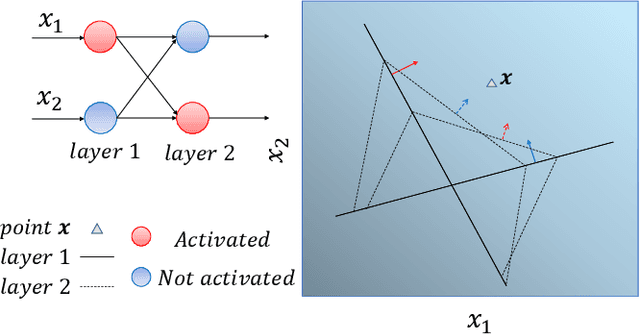
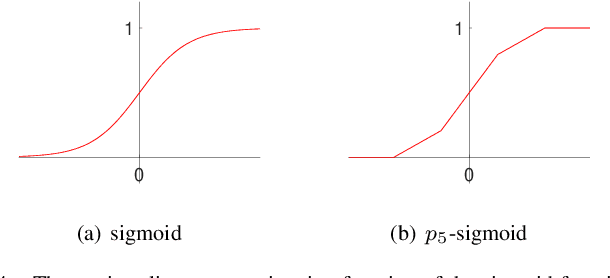
Interpretability of intelligent algorithms represented by deep learning has been yet an open problem. We discuss the shortcomings of the existing explainable method based on the two attributes of explanation, which are called completeness and explicitness. Furthermore, we point out that a model that completely relies on feed-forward mapping is extremely easy to cause inexplicability because it is hard to quantify the relationship between this mapping and the final model. Based on the perspective of the data space division, the principle of complete local interpretable model-agnostic explanations (CLIMEP) is proposed in this paper. To study the classification problems, we further discussed the equivalence of the CLIMEP and the decision boundary. As a matter of fact, it is also difficult to implementation of CLIMEP. To tackle the challenge, motivated by the fact that a fully-connected neural network (FCNN) with piece-wise linear activation functions (PWLs) can partition the input space into several linear regions, we extend this result to arbitrary FCNNs by the strategy of linearizing the activation functions. Applying this technique to solving classification problems, it is the first time that the complete decision boundary of FCNNs has been able to be obtained. Finally, we propose the DecisionNet (DNet), which divides the input space by the hyper-planes of the decision boundary. Hence, each linear interval of the DNet merely contains samples of the same label. Experiments show that the surprising model compression efficiency of the DNet with an arbitrary controlled precision.
Datasets and Evaluation for Simultaneous Localization and Mapping Related Problems: A Comprehensive Survey
Feb 08, 2021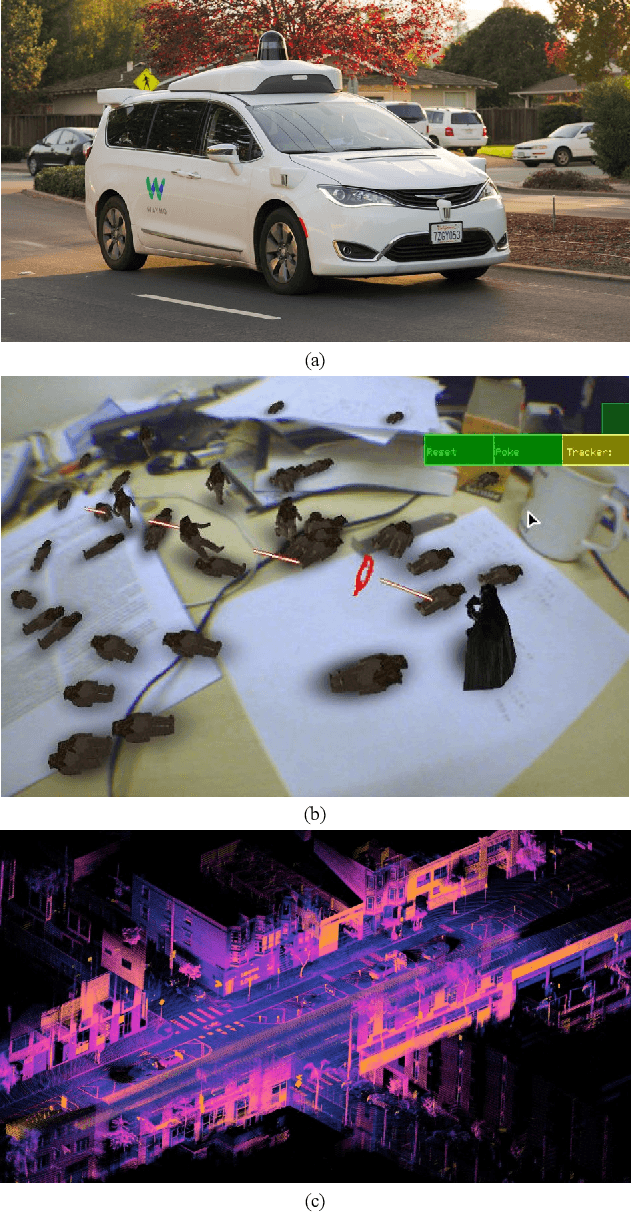
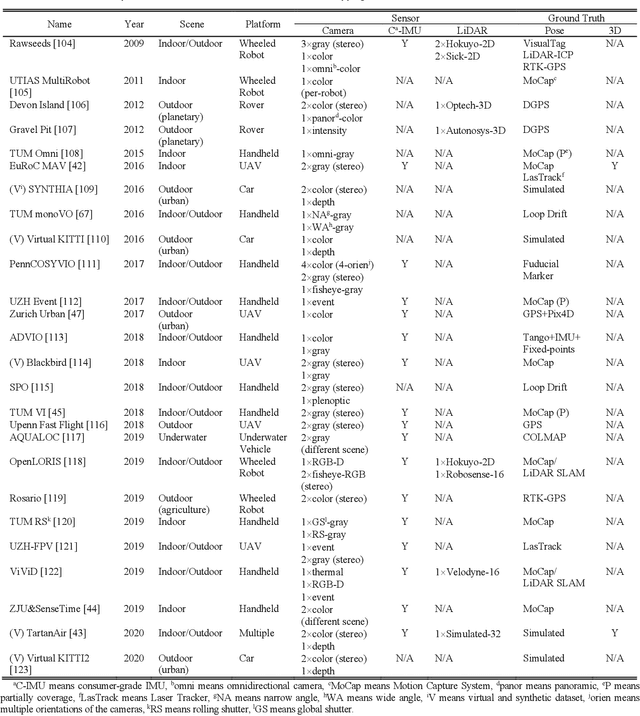
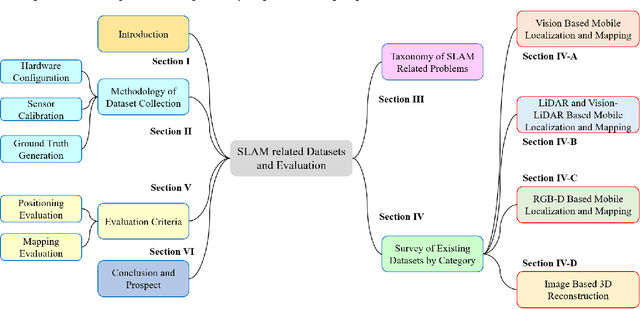
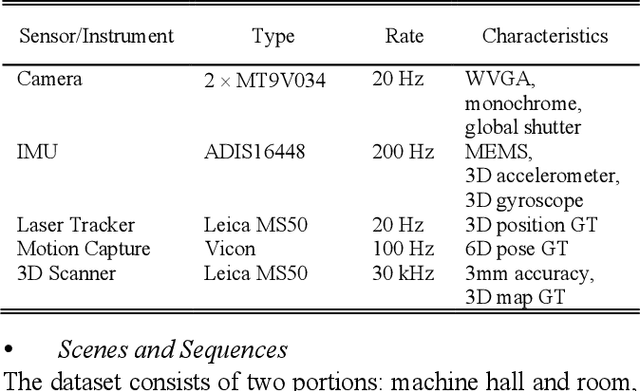
Simultaneous Localization and Mapping (SLAM) has found an increasing utilization lately, such as self-driving cars, robot navigation, 3D mapping, virtual reality (VR) and augmented reality (AR), etc., empowering both industry and daily life. Although the state-of-the-art algorithms where developers have spared no effort are source of intelligence, it is the datasets that dedicate behind and raise us higher. The employment of datasets is essentially a kind of simulation but profits many aspects - capacity of drilling algorithm hourly, exemption of costly hardware and ground truth system, and equitable benchmark for evaluation. However, as a branch of great significance, still the datasets have not drawn wide attention nor been reviewed thoroughly. Hence in this article, we strive to give a comprehensive and open access review of SLAM related datasets and evaluation, which are scarcely surveyed while highly demanded by researchers and engineers, looking forward to serving as not only a dictionary but also a development proposal. The paper starts with the methodology of dataset collection, and a taxonomy of SLAM related tasks. Then followed with the main portion - comprehensively survey the existing SLAM related datasets by category with our considerate introductions and insights. Furthermore, we talk about the evaluation criteria, which are necessary to quantify the algorithm performance on the dataset and inspect the defects. At the end, we summarize the weakness of datasets and evaluation - which could well result in the weakness of topical algorithms - to promote bridging the gap fundamentally.