 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTARK denoises spatial transcriptomics images via adaptive regularization
Dec 10, 2025We present an approach to denoising spatial transcriptomics images that is particularly effective for uncovering cell identities in the regime of ultra-low sequencing depths, and also allows for interpolation of gene expression. The method -- Spatial Transcriptomics via Adaptive Regularization and Kernels (STARK) -- augments kernel ridge regression with an incrementally adaptive graph Laplacian regularizer. In each iteration, we (1) perform kernel ridge regression with a fixed graph to update the image, and (2) update the graph based on the new image. The kernel ridge regression step involves reducing the infinite dimensional problem on a space of images to finite dimensions via a modified representer theorem. Starting with a purely spatial graph, and updating it as we improve our image makes the graph more robust to noise in low sequencing depth regimes. We show that the aforementioned approach optimizes a block-convex objective through an alternating minimization scheme wherein the sub-problems have closed form expressions that are easily computed. This perspective allows us to prove convergence of the iterates to a stationary point of this non-convex objective. Statistically, such stationary points converge to the ground truth with rate $\mathcal{O}(R^{-1/2})$ where $R$ is the number of reads. In numerical experiments on real spatial transcriptomics data, the denoising performance of STARK, evaluated in terms of label transfer accuracy, shows consistent improvement over the competing methods tested.
Identifying Drift, Diffusion, and Causal Structure from Temporal Snapshots
Oct 30, 2024Stochastic differential equations (SDEs) are a fundamental tool for modelling dynamic processes, including gene regulatory networks (GRNs), contaminant transport, financial markets, and image generation. However, learning the underlying SDE from observational data is a challenging task, especially when individual trajectories are not observable. Motivated by burgeoning research in single-cell datasets, we present the first comprehensive approach for jointly estimating the drift and diffusion of an SDE from its temporal marginals. Assuming linear drift and additive diffusion, we prove that these parameters are identifiable from marginals if and only if the initial distribution is not invariant to a class of generalized rotations, a condition that is satisfied by most distributions. We further prove that the causal graph of any SDE with additive diffusion can be recovered from the SDE parameters. To complement this theory, we adapt entropy-regularized optimal transport to handle anisotropic diffusion, and introduce APPEX (Alternating Projection Parameter Estimation from $X_0$), an iterative algorithm designed to estimate the drift, diffusion, and causal graph of an additive noise SDE, solely from temporal marginals. We show that each of these steps are asymptotically optimal with respect to the Kullback-Leibler divergence, and demonstrate APPEX's effectiveness on simulated data from linear additive noise SDEs.
Efficient Algorithms for Generating Provably Near-Optimal Cluster Descriptors for Explainability
Feb 06, 2020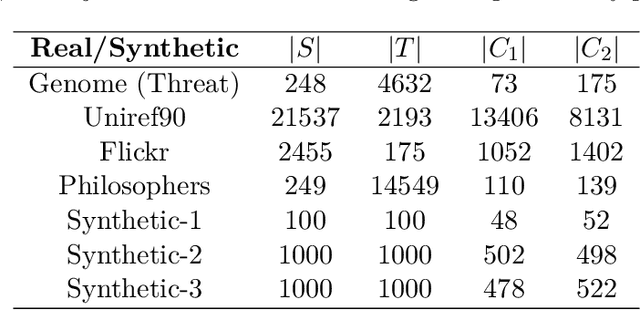

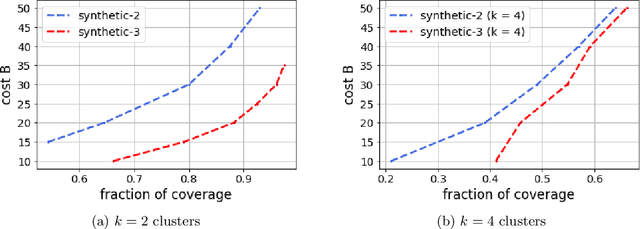
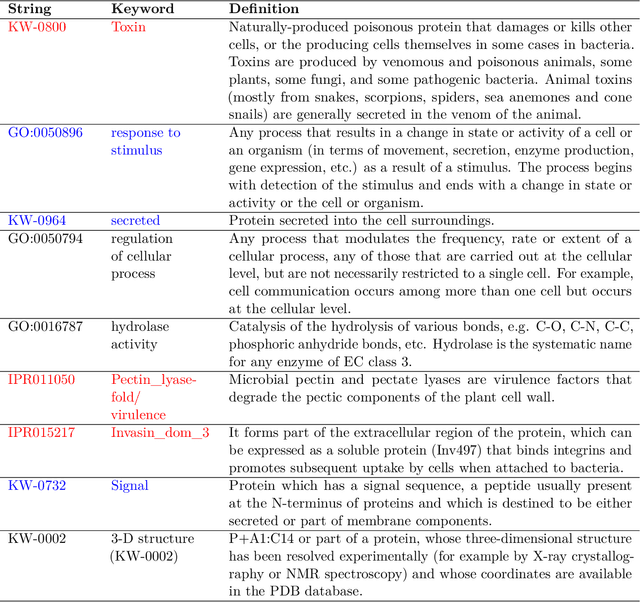
Improving the explainability of the results from machine learning methods has become an important research goal. Here, we study the problem of making clusters more interpretable by extending a recent approach of [Davidson et al., NeurIPS 2018] for constructing succinct representations for clusters. Given a set of objects $S$, a partition $\pi$ of $S$ (into clusters), and a universe $T$ of tags such that each element in $S$ is associated with a subset of tags, the goal is to find a representative set of tags for each cluster such that those sets are pairwise-disjoint and the total size of all the representatives is minimized. Since this problem is NP-hard in general, we develop approximation algorithms with provable performance guarantees for the problem. We also show applications to explain clusters from datasets, including clusters of genomic sequences that represent different threat levels.
Using Entropy Estimates for DAG-Based Ontologies
Jun 19, 2017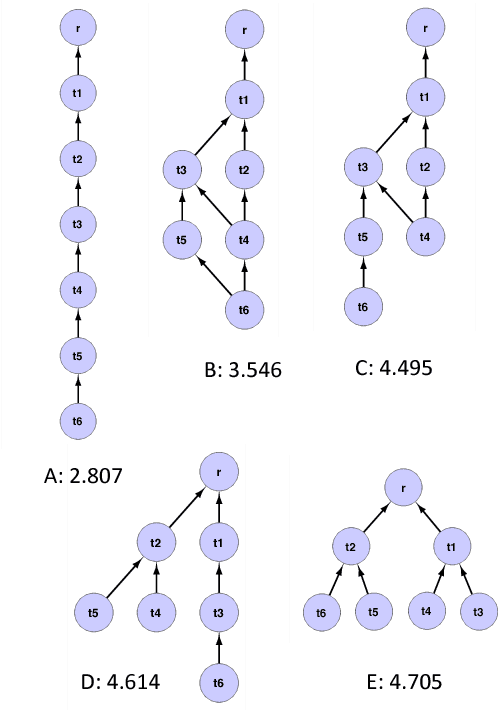
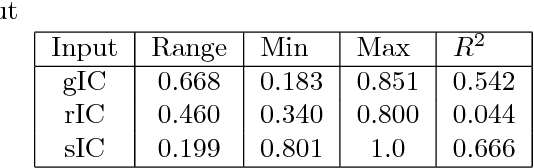
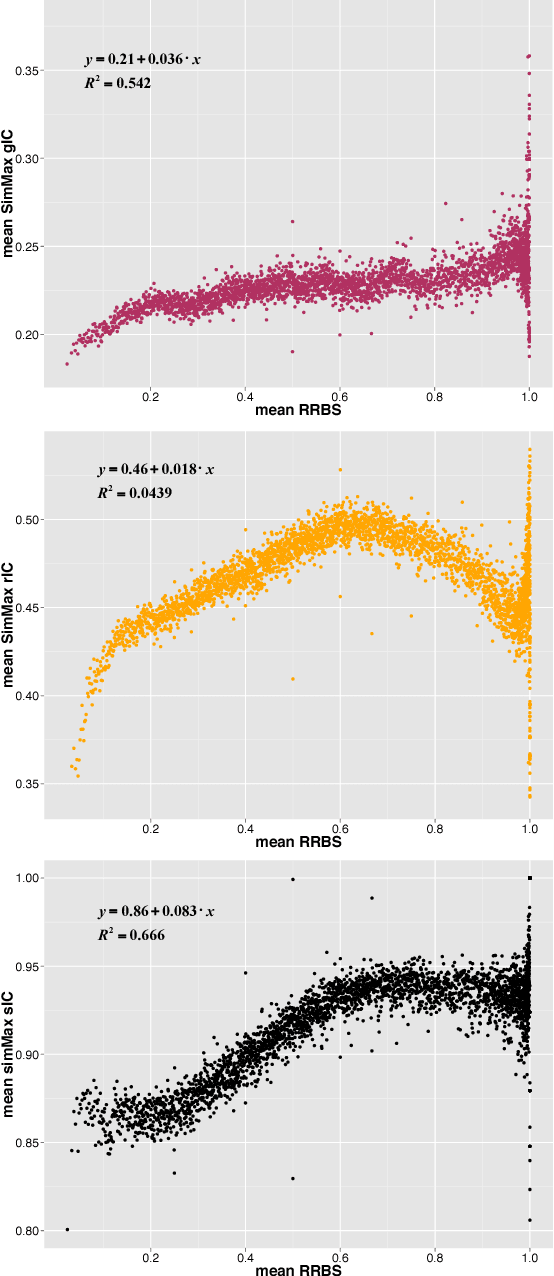
Motivation: Entropy measurements on hierarchical structures have been used in methods for information retrieval and natural language modeling. Here we explore its application to semantic similarity. By finding shared ontology terms, semantic similarity can be established between annotated genes. A common procedure for establishing semantic similarity is to calculate the descriptiveness (information content) of ontology terms and use these values to determine the similarity of annotations. Most often information content is calculated for an ontology term by analyzing its frequency in an annotation corpus. The inherent problems in using these values to model functional similarity motivates our work. Summary: We present a novel calculation for establishing the entropy of a DAG-based ontology, which can be used in an alternative method for establishing the information content of its terms. We also compare our IC metric to two others using semantic and sequence similarity.
An Experimental Platform for Multi-spacecraft Phase-Array Communications
May 24, 2017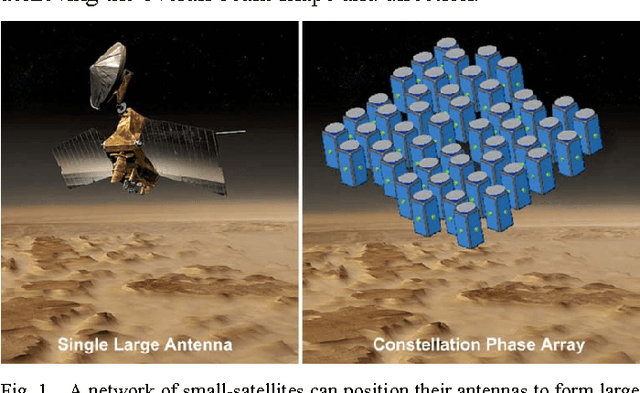

The emergence of small satellites and CubeSats for interplanetary exploration will mean hundreds if not thousands of spacecraft exploring every corner of the solar-system. Current methods for communication and tracking of deep space probes use ground based systems such as the Deep Space Network (DSN). However, the increased communication demand will require radically new methods to ease communication congestion. Networks of communication relay satellites located at strategic locations such as geostationary orbit and Lagrange points are potential solutions. Instead of one large communication relay satellite, we could have scores of small satellites that utilize phase arrays to effectively operate as one large satellite. Excess payload capacity on rockets can be used to warehouse more small satellites in the communication network. The advantage of this network is that even if one or a few of the satellites are damaged or destroyed, the network still operates but with degraded performance. The satellite network would operate in a distributed architecture and some satellites maybe dynamically repurposed to split and communicate with multiple targets at once. The potential for this alternate communication architecture is significant, but this requires development of satellite formation flying and networking technologies. Our research has found neural-network control approaches such as the Artificial Neural Tissue can be effectively used to control multirobot/multi-spacecraft systems and can produce human competitive controllers. We have been developing a laboratory experiment platform called Athena to develop critical spacecraft control algorithms and cognitive communication methods. We briefly report on the development of the platform and our plans to gain insight into communication phase arrays for space.
Guidance, Navigation and Control of Multirobot Systems in Cooperative Cliff Climbing
Feb 21, 2017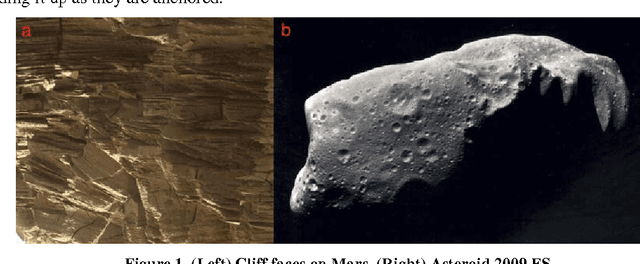

The application of GNC devices on small robots is a game-changer that enables these robots to be mobile on low-gravity planetary surfaces and small bodies. Use of reaction wheels enables these robots to roll, hop, summersault and rest on precarious/sloped surfaces that would otherwise not be possible with conven-tional wheeled robots. We are extending this technology to enable robots to climb off-world canyons, cliffs and caves. A single robot may slip and fall, however, a multirobot system can work cooperatively by being interlinked using spring-tethers and work much like a team of mountaineers to systematically climb a slope. A multirobot system as we will show in this paper can climb sur-faces not possible with a single robot alone. We consider a team of four robots that are interlinked with tethers in an 'x' configuration. Each robot secures itself to a slope using spiny gripping actuators, and one by one each robot moves up-wards by crawling, rolling or hopping up the slope. If any one of the robots loses grip, slips or falls, the remaining robots will be holding it up as they are anchored. This distributed controls approach to cliff climbing enables the system to reconfigure itself where possible and avoid getting stuck at one hard to reach location. Instead, the risk is distributed and through close cooperation, the robots can identify multiple trajectories to climb a cliff or rugged surface. The benefits can also be realized on milligravity surfaces such as asteroids. Too fast a jump can result in the robot flying off the surface into space. Having multiple robots anchored to the surface keeps the entire system secure. Our work combines dynamics and control simulation to evaluate the feasibility of our approach. The simulation results show a promising pathway towards advanced development of this technology on a team of real robots.
Spherical Planetary Robot for Rugged Terrain Traversal
Feb 09, 2017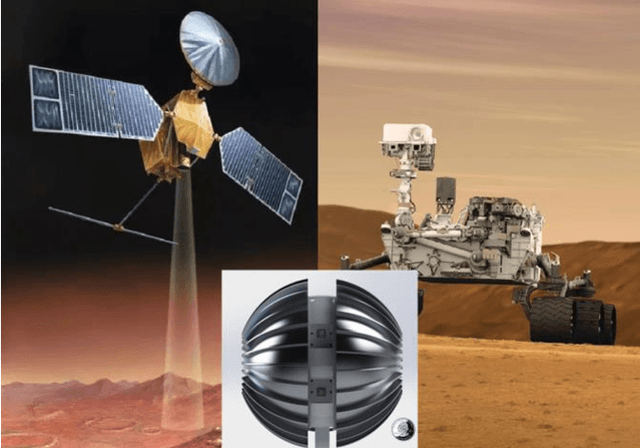
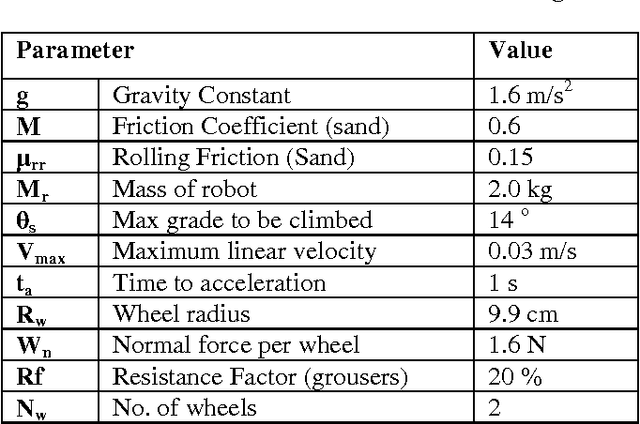
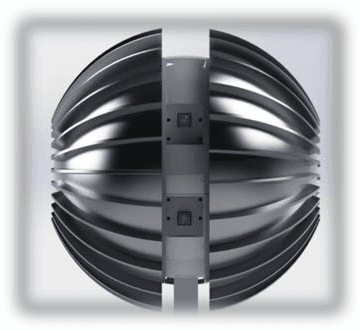
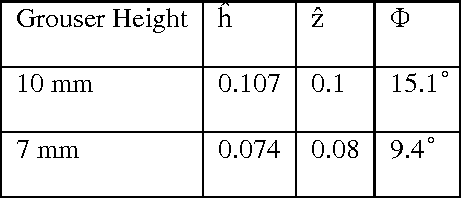
Wheeled planetary rovers such as the Mars Exploration Rovers (MERs) and Mars Science Laboratory (MSL) have provided unprecedented, detailed images of the Mars surface. However, these rovers are large and are of high-cost as they need to carry sophisticated instruments and science laboratories. We propose the development of low-cost planetary rovers that are the size and shape of cantaloupes and that can be deployed from a larger rover. The rover named SphereX is 2 kg in mass, is spherical, holonomic and contains a hopping mechanism to jump over rugged terrain. A small low-cost rover complements a larger rover, particularly to traverse rugged terrain or roll down a canyon, cliff or crater to obtain images and science data. While it may be a one-way journey for these small robots, they could be used tactically to obtain high-reward science data. The robot is equipped with a pair of stereo cameras to perform visual navigation and has room for a science payload. In this paper, we analyze the design and development of a laboratory prototype. The results show a promising pathway towards development of a field system.
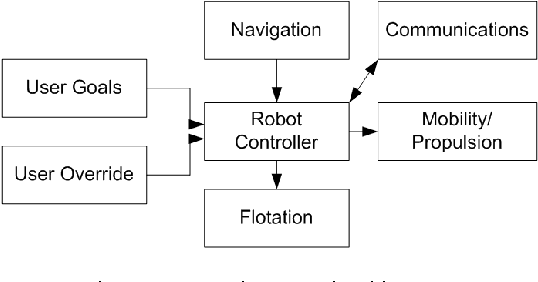
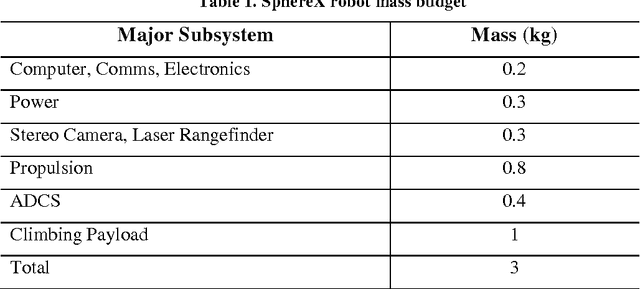
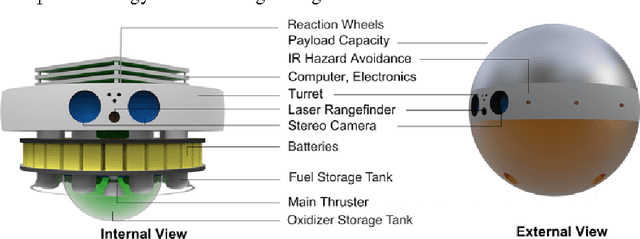
GNC of the SphereX Robot for Extreme Environment Exploration on Mars
Jan 31, 2017
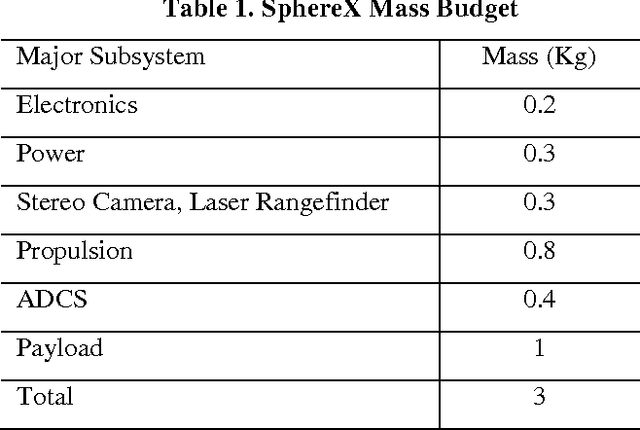

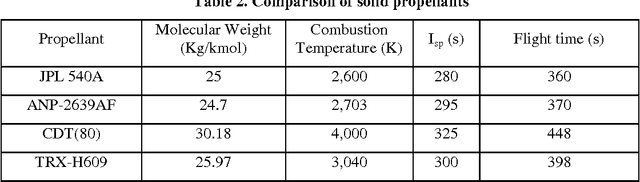
Wheeled ground robots are limited from exploring extreme environments such as caves, lava tubes and skylights. Small robots that can utilize unconventional mobility through hopping, flying or rolling can overcome these limitations. Mul-tiple robots operating as a team offer significant benefits over a single large ro-bot, as they are not prone to single-point failure, enable distributed command and control and enable execution of tasks in parallel. These robots can complement large rovers and landers, helping to explore inaccessible sites, obtaining samples and for planning future exploration missions. Our robots, the SphereX, are 3-kg in mass, spherical and contain computers equivalent to current smartphones. They contain an array of guidance, navigation and control sensors and electronics. SphereX contains room for a 1-kg science payload, including for sample return. Our work in this field has recognized the need for miniaturized chemical mobility systems that provide power and propulsion. Our research explored the use of miniature rockets, including solid rockets, bi-propellants including RP1/hydrogen-peroxide and polyurethane/ammonium-perchlorate. These propulsion options provide maximum flight times of 10 minutes on Mars. Flying, especially hovering consumes significant fuel; hence, we have been developing our robots to perform ballistic hops that enable the robots to travel efficiently over long distances. Techniques are being developed to enable mid-course correction during a ballistic hop. Using multiple cameras, it is possible to reconstitute an image scene from motion blur. Hence our approach is to enable photo mapping as the robots travel on a ballistic hop. The same images would also be used for navigation and path planning. Using our proposed design approach, we are developing low-cost methods for surface exploration of planetary bodies using a network of small robots.