 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Shapeshifter: a Morphing, Multi-Agent,Multi-Modal Robotic Platform for the Exploration of Titan
Mar 16, 2020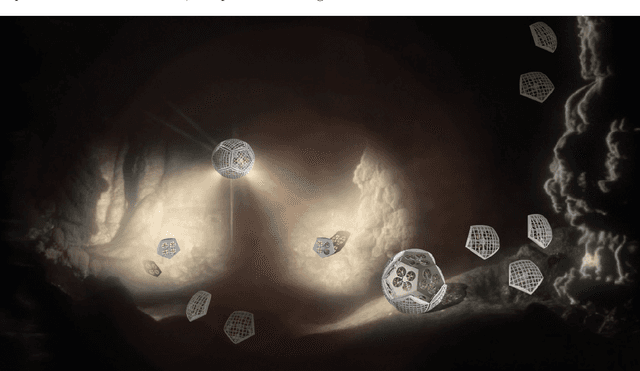
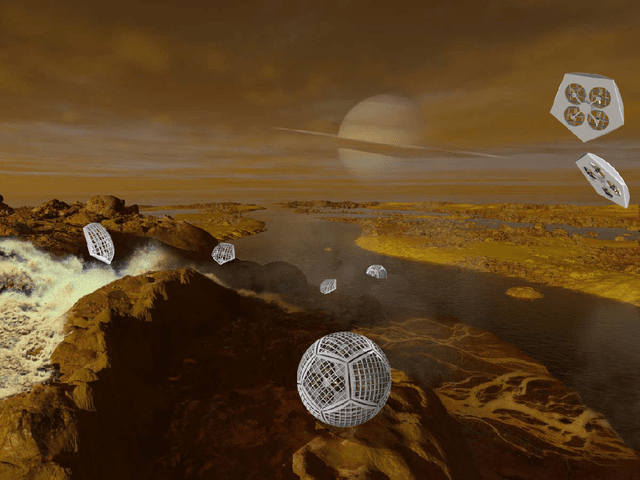
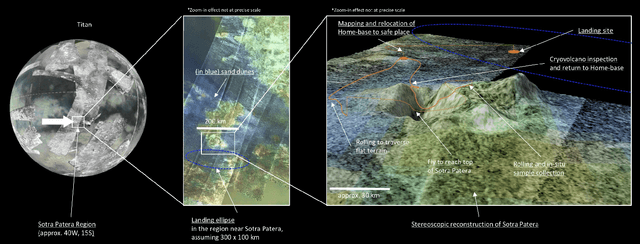
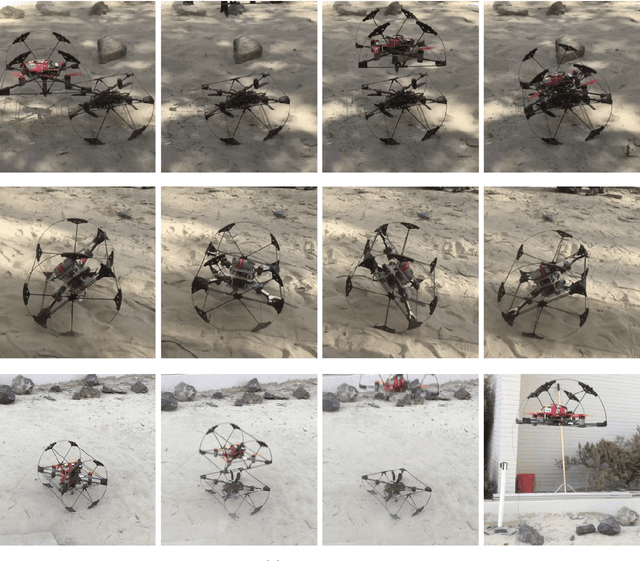
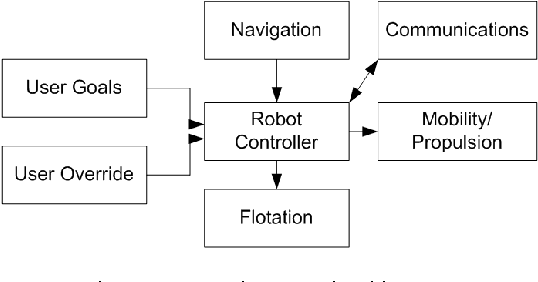
In this report for the Nasa NIAC Phase I study, we present a mission architecture and a robotic platform, the Shapeshifter, that allow multi-domain and redundant mobility on Saturn's moon Titan, and potentially other bodies with atmospheres. The Shapeshifter is a collection of simple and affordable robotic units, called Cobots, comparable to personal palm-size quadcopters. By attaching and detaching with each other, multiple Cobots can shape-shift into novel structures, capable of (a) rolling on the surface, to increase the traverse range, (b) flying in a flight array formation, and (c) swimming on or under liquid. A ground station complements the robotic platform, hosting science instrumentation and providing power to recharge the batteries of the Cobots. Our Phase I study had the objective of providing an initial assessment of the feasibility of the proposed robotic platform architecture, and in particular (a) to characterize the expected science return of a mission to the Sotra-Patera region on Titan; (b) to verify the mechanical and algorithmic feasibility of building a multi-agent platform capable of flying, docking, rolling and un-docking; (c) to evaluate the increased range and efficiency of rolling on Titan w.r.t to flying; (d) to define a case-study of a mission for the exploration of the cryovolcano Sotra-Patera on Titan, whose expected variety of geological features challenges conventional mobility platforms.
An Experimental Platform for Multi-spacecraft Phase-Array Communications
May 24, 2017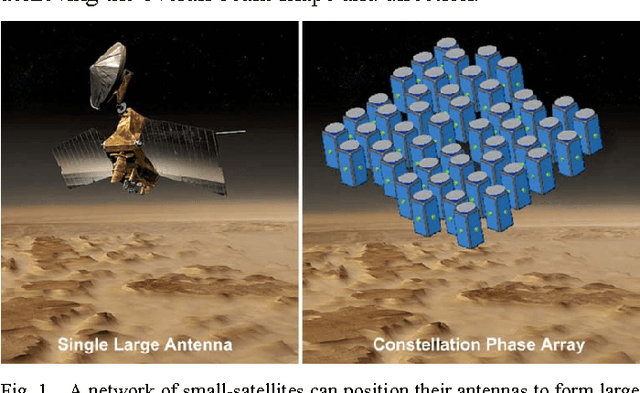
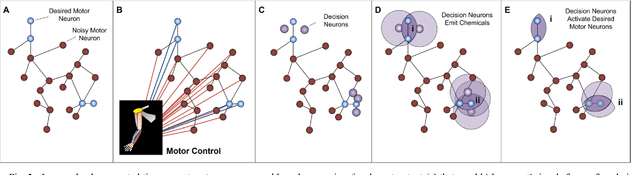

The emergence of small satellites and CubeSats for interplanetary exploration will mean hundreds if not thousands of spacecraft exploring every corner of the solar-system. Current methods for communication and tracking of deep space probes use ground based systems such as the Deep Space Network (DSN). However, the increased communication demand will require radically new methods to ease communication congestion. Networks of communication relay satellites located at strategic locations such as geostationary orbit and Lagrange points are potential solutions. Instead of one large communication relay satellite, we could have scores of small satellites that utilize phase arrays to effectively operate as one large satellite. Excess payload capacity on rockets can be used to warehouse more small satellites in the communication network. The advantage of this network is that even if one or a few of the satellites are damaged or destroyed, the network still operates but with degraded performance. The satellite network would operate in a distributed architecture and some satellites maybe dynamically repurposed to split and communicate with multiple targets at once. The potential for this alternate communication architecture is significant, but this requires development of satellite formation flying and networking technologies. Our research has found neural-network control approaches such as the Artificial Neural Tissue can be effectively used to control multirobot/multi-spacecraft systems and can produce human competitive controllers. We have been developing a laboratory experiment platform called Athena to develop critical spacecraft control algorithms and cognitive communication methods. We briefly report on the development of the platform and our plans to gain insight into communication phase arrays for space.