 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of Techniques Enabling Suborbital Small Object Capture Around Low Gravity Asteroids
Dec 18, 2020



The exploration of small body asteroids provides direct access to the primitive building blocks of our solar system. Sample and return missions enable chemical and radioisotope studies which not only provide evidence for the formation of the solar system, but also a basic understanding of where resources might be found for future exploitation. The touch-down and sample techniques established by Hayabusa-2 and OSIRIS-REx accomplish this mission by physically touching down on the asteroid and collecting samples into a basket extended via a probe from the bottom of the spacecraft. This technique has been demonstrated to work, but contains a high cost in both mission operations as well as the size and complexity of the collection mechanism itself. This paper explores an alternative sample and return technique by exploiting the recent discovery of regolith particle ejections from Bennu. Particles ejected from the surface of Bennu are typically 1 cm in size and spend several hours in flight, suggesting the possibility that nanospacecraft deployed from the mother-spacecraft could chase down, collect and return with the sample with minimal sensor and delta-V capability. Key aspects of this mission are developed to reduce risk, and an overall mission concept is developed to establish plausibility.
FemtoSats for Exploring Permanently Shadowed Regions on the Moon
Dec 15, 2020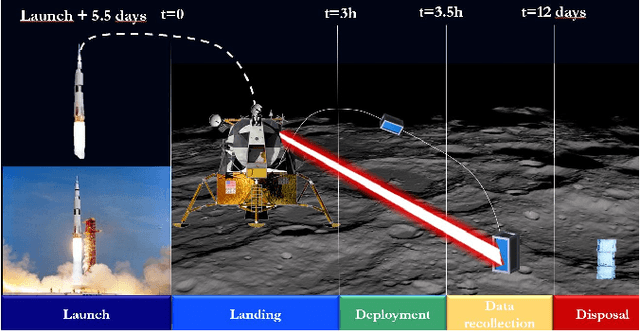
The recent, rapid advancement in space exploration is thanks to the accelerated miniaturization of electronics components on a spacecraft that is reducing the mass, volume and cost of satellites. Yet, access to space remains a distant dream as there is growing complexity in what is required of satellites and increasing space traffic. Interplanetary exploration is even harder and has limited possibilities for low cost mission. All of these factors make even CubeSats, the entry-level standard too expensive for most and therefore a better way needs to be found. The proposed solution in this report is a low-mass, low-cost, disposable solution that exploits the latest advances in electronics and is relatively easy to integrate: FemtoSats. FemtoSats are sub-100-gram spacecraft. The FemtoSat concept is based on launching a swarm where the main tasks are divided between the members of the swarm. This means that if one fails the swarm can take its place and therefore substitute it without risking the whole mission. In this paper we explore the utility of FemtoSats to perform first exploration and mapping of a Lunar PSR. This concept was recognized as finalist for the NASA BIG Competition in 2020. This is an example of a high-risk, high-reward mission where losing one FemtoSat does not mean the mission is in danger as it happens with regular satellite missions.
Co-Evolution of Multi-Robot Controllers and Task Cues for Off-World Open Pit Mining
Sep 19, 2020
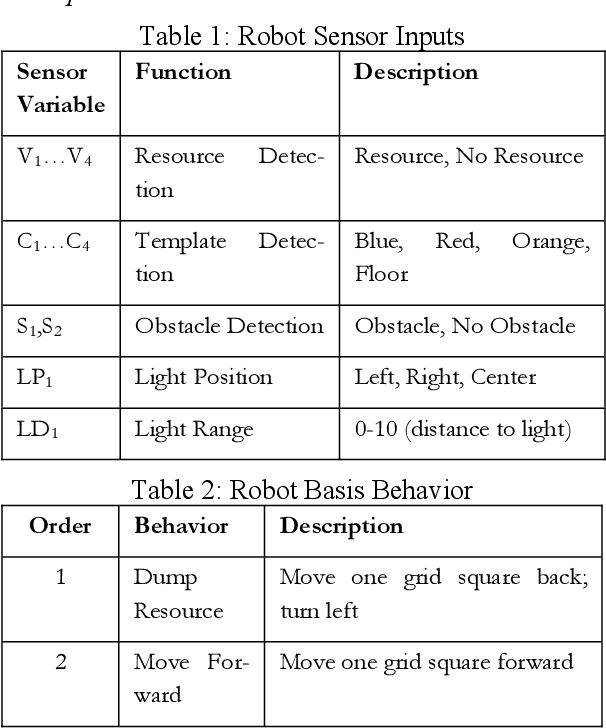
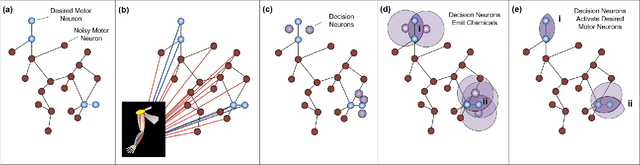
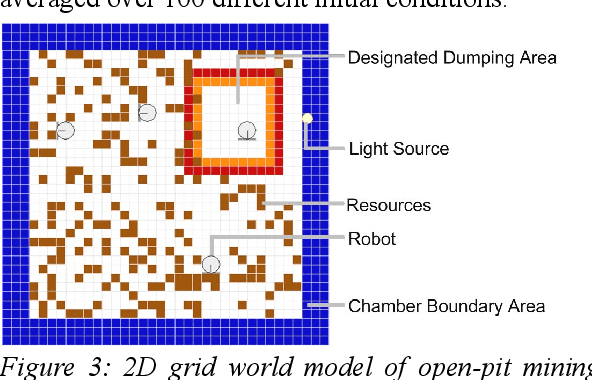
Robots are ideal for open-pit mining on the Moon as its a dull, dirty, and dangerous task. The challenge is to scale up productivity with an ever-increasing number of robots. This paper presents a novel method for developing scalable controllers for use in multi-robot excavation and site-preparation scenarios. The controller starts with a blank slate and does not require human-authored operations scripts nor detailed modeling of the kinematics and dynamics of the excavator. The 'Artificial Neural Tissue' (ANT) architecture is used as a control system for autonomous robot teams to perform resource gathering. This control architecture combines a variable-topology neural-network structure with a coarse-coding strategy that permits specialized areas to develop in the tissue. Our work in this field shows that fleets of autonomous decentralized robots have an optimal operating density. Too few robots result in insufficient labor, while too many robots cause antagonism, where the robots undo each other's work and are stuck in gridlock. In this paper, we explore the use of templates and task cues to improve group performance further and minimize antagonism. Our results show light beacons and task cues are effective in sparking new and innovative solutions at improving robot performance when placed under stressful situations such as severe time-constraint.
The Design of a Space-based Observation and Tracking System for Interstellar Objects
Feb 03, 2020


The recent observation of interstellar objects, 1I/Oumuamua and 2I/Borisov cross the solar system opened new opportunities for planetary science and planetary defense. As the first confirmed objects originating outside of the solar system, there are myriads of origin questions to explore and discuss, including where they came from, how did they get here and what are they composed of. Besides, there is a need to be cognizant especially if such interstellar objects pass by the Earth of potential dangers of impact. Specifically, in the case of Oumuamua, which was detected after its perihelion, passed by the Earth at around 0.2 AU, with an estimated excess speed of 60 km/s relative to the Earth. Without enough forewarning time, a collision with such high-speed objects can pose a catastrophic danger to all life Earth. Such challenges underscore the importance of detection and exploration systems to study these interstellar visitors. The detection system can include a spacecraft constellation with zenith-pointing telescope spacecraft. After an event is detected, a spacecraft swarm can be deployed from Earth to flyby past the visitor. The flyby can then be designed to perform a proximity operation of interest. This work aims to develop algorithms to design these swarm missions through the IDEAS (Integrated Design Engineering & Automation of Swarms) architecture. Specifically, we develop automated algorithms to design an Earth-based detection constellation and a spacecraft swarm that generates detailed surface maps of the visitor during the rendezvous, along with their heliocentric cruise trajectories.
Autonomous Robot Swarms for Off-World Construction and Resource Mining
Dec 03, 2019
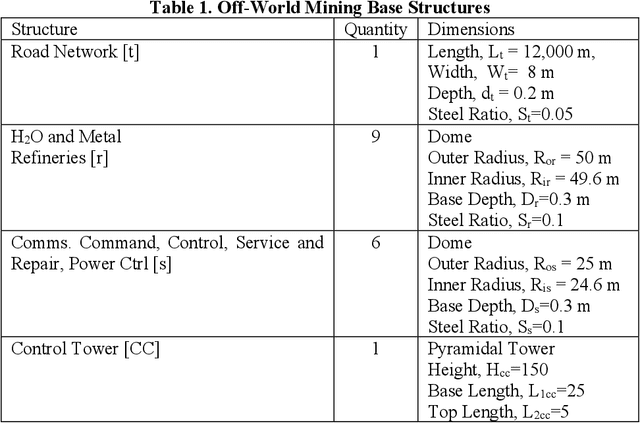
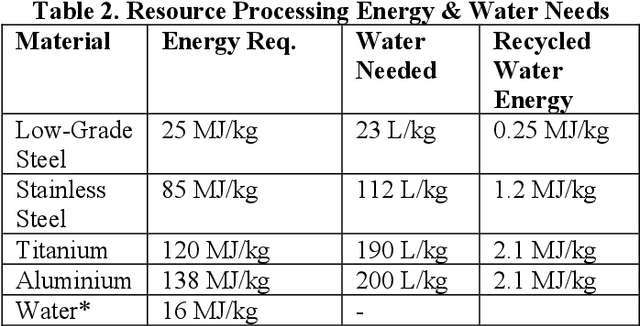
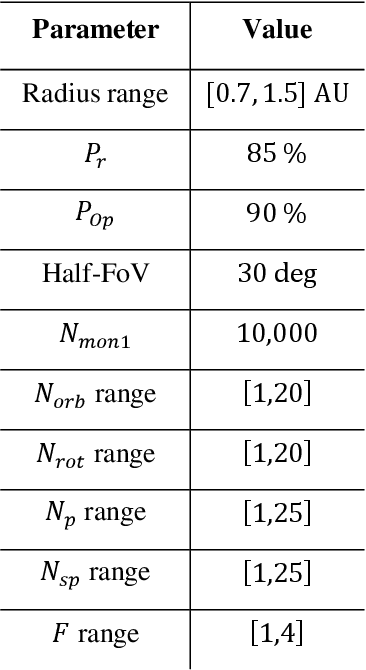
Kick-starting the space economy requires identification of critical resources that can lower the cost of space transport, sustain logistic bases and communication relay networks between major nodes in the network. One important challenge with this space-economy is ensuring the low-cost transport of raw materials from one gravity-well to another. The escape delta-v of 11.2 km/s from Earth makes this proposition very expensive. Transporting materials from the Moon takes 2.4 km/s and from Mars 5.0 km/s. Based on these factors, the Moon and Mars have the potential to export material into this space economy. Water has been identified as a critical resource both to sustain human-life but also for use in propulsion, attitude-control, power, thermal storage and radiation protection systems.There is also important need for construction materials such as aluminum, iron/steel, and titanium. Based upon these important findings, we have developed an energy model to determine the feasibility of developing a mining base on the Moon and Mars. These mining base mine and principally exports water, aluminum, titanium and steel. Our designs for a mining base utilize renewable energy sources namely photovoltaics and solar-thermal concentrators to provide power to construct the base, keep it operational and export water and other resources using a Mass Driver. Using the energy model developed, we will determine the energy per Earth-day to export 100 tons each of water, titanium, aluminum and low-grade steel into escape velocity of the Moon and Mars. We perform a detailed comparison of the energy required for construction of similar bases on the Moon and Mars, in addition to the operating energy required for regolith excavation, processing, refining and finally transport off-the-body.
Development and Testing of an Engineering Model for an Asteroid Hopping Robot
Oct 09, 2019
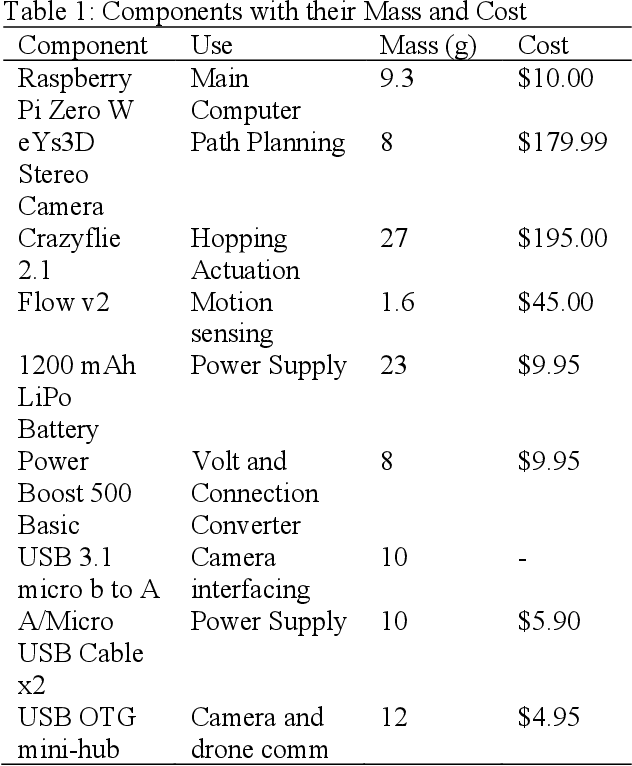
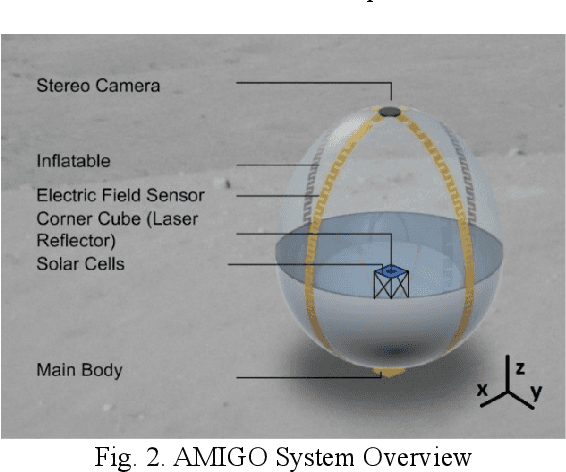
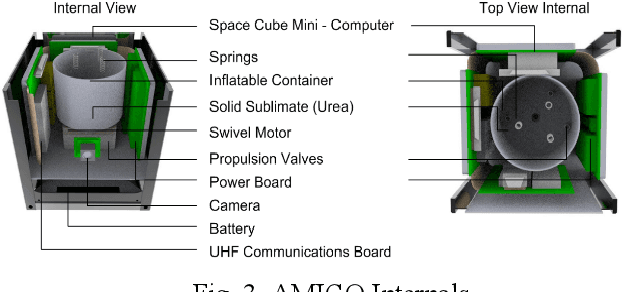
The science and origins of asteroids is deemed high priority in the Planetary Science Decadal Survey. Two of the main questions from the Decadal Survey pertain to what the "initial stages, conditions, and processes of solar system formation and the nature of the interstellar matter" that was present in the protoplanetary disk, as well as determining the "primordial sources for organic matter." Major scientific goals for the study of planetesimals are to decipher geological processes in SSSBs not determinable from investigation via in situ experimentation, and to understand how planetesimals contribute to the formation of planets. Ground based observations are not sufficient to examine SSSBs, as they are only able to measure what is on the surface of the body; however, in situ analysis allows for further, close up investigation as to the surface characteristics and the inner composure of the body. The Asteroid Mobile Imager and Geologic Observer (AMIGO) is a 1U stowed autonomous robot that can perform surface hopping on an asteroid with an inflatable structure. It contains science instruments to provide stereo context imaging, micro-imaging, seismic sensing, and electric field measurements. Multiple hopping robots are deployed as a team to eliminate single-point failure and add robustness to data collection. An on-board attitude control system consists of a thruster chip of discretized micro-nozzles that provides hopping thrust and a reaction wheel for controlling the third axis. For the continued development of the robot, an engineering model is developed to test various components and algorithms.
Autonomous Multirobot Technologies for Mars Mining Base Construction and Operation
Oct 09, 2019

Beyond space exploration, the next critical step towards living and working in space requires developing a space economy. One important challenge with this space-economy is ensuring the low-cost transport of raw materials from one gravity-well to another. The escape delta-v of 11.2 km/s from Earth makes this proposition very expensive. Transporting materials from the Moon takes 2.4 km/s and from Mars 5.0 km/s. Based on these factors, the Moon and Mars can become colonies to export material into this space economy. One critical question is what are the resources required to sustain a space economy? Water has been identified as a critical resource both to sustain human-life but also for use in propulsion, attitude-control, power, thermal storage and radiation protection systems. Water may be obtained off-world through In-Situ Resource Utilization (ISRU) in the course of human or robotic space exploration. Based upon these important findings, we developed an energy model to determine the feasibility of developing a mining base on Mars that mines and exports water (transports water on a Mars escape trajectory). Our designs for a mining base utilize renewable energy sources namely photovoltaics and solar-thermal concentrators to provide power to construct the base, keep it operational and export the water using a mass driver (electrodynamic railgun). Our studies found the key to keeping the mining base simple and effective is to make it robotic. Teams of robots (consisting of 100 infrastructure robots) would be used to construct the entire base using locally available resources and fully operate the base. This would decrease energy needs by 5-folds. Furthermore, the base can be built 5-times faster using robotics and 3D printing. This shows that automation and robotics is the key to making such a base technologically feasible.
Automated Multidisciplinary Design and Control of Hopping Robots for Exploration of Extreme Environments on the Moon and Mars
Oct 09, 2019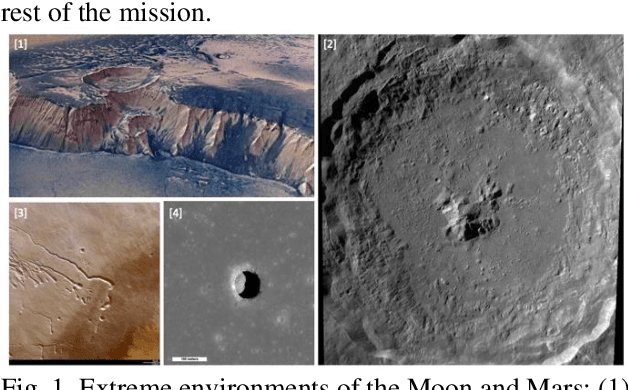
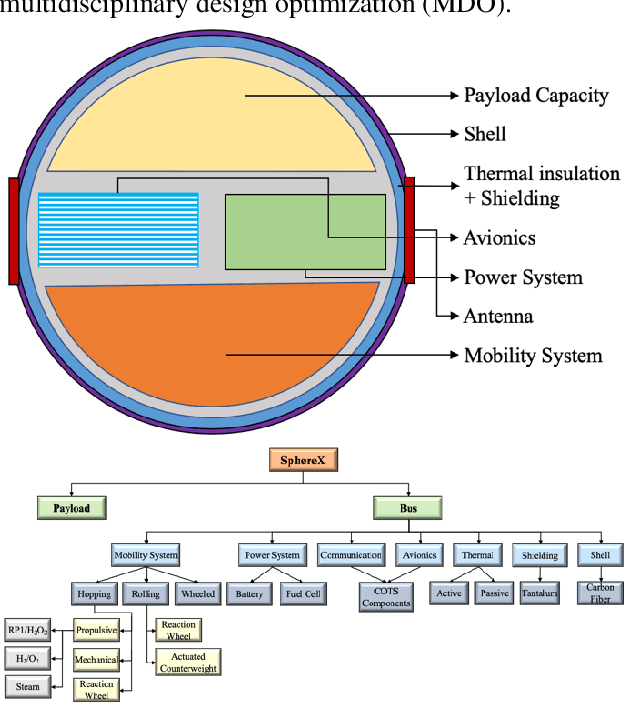
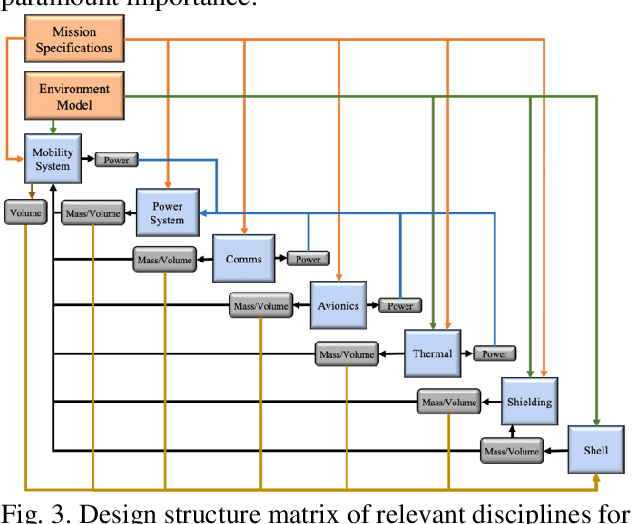
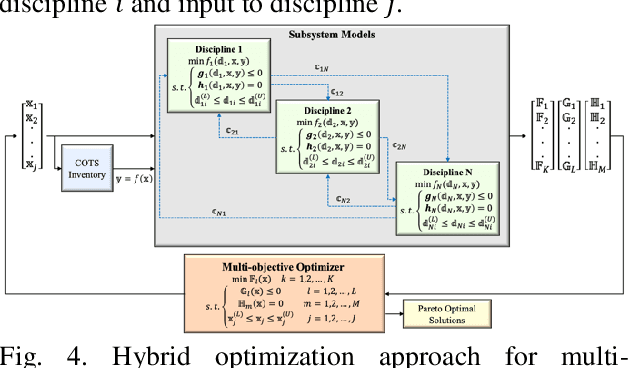
The next frontier in solar system exploration will be missions targeting extreme and rugged environments such as caves, canyons, cliffs and crater rims of the Moon, Mars and icy moons. These environments are time capsules into early formation of the solar system and will provide vital clues of how our early solar system gave way to the current planets and moons. These sites will also provide vital clues to the past and present habitability of these environments. Current landers and rovers are unable to access these areas of high interest due to limitations in precision landing techniques, need for large and sophisticated science instruments and a mission assurance and operations culture where risks are minimized at all costs. Our past work has shown the advantages of using multiple spherical hopping robots called SphereX for exploring these extreme environments. Our previous work was based on performing exploration with a human-designed baseline design of a SphereX robot. However, the design of SphereX is a complex task that involves a large number of design variables and multiple engineering disciplines. In this work we propose to use Automated Multidisciplinary Design and Control Optimization (AMDCO) techniques to find near optimal design solutions in terms of mass, volume, power, and control for SphereX for different mission scenarios.
Building Small-Satellites to Live Through the Kessler Effect
Sep 02, 2019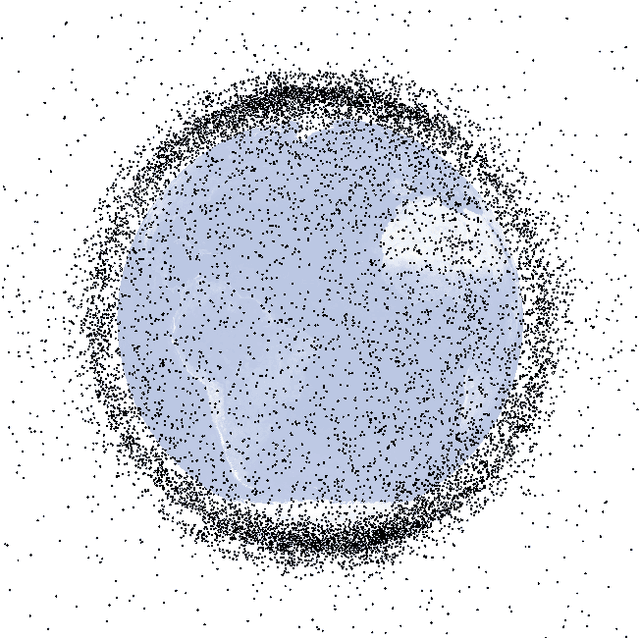
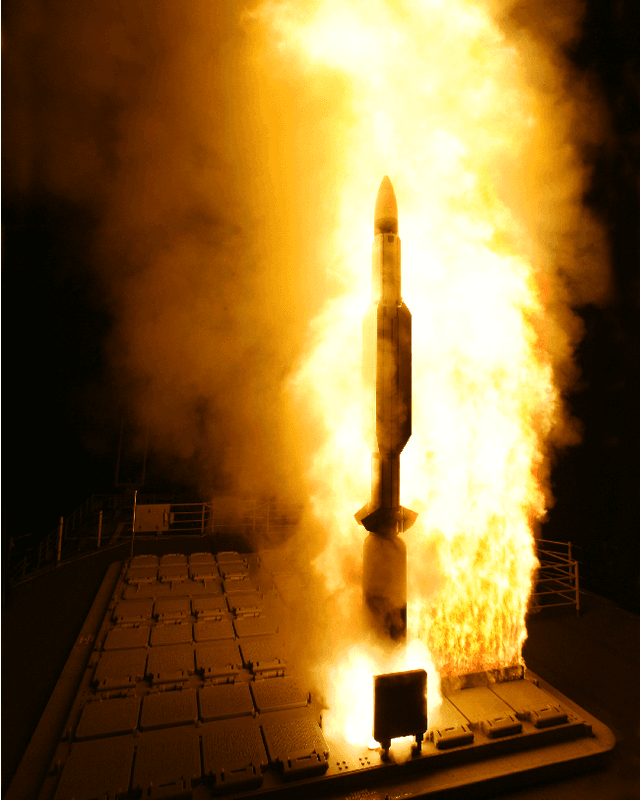
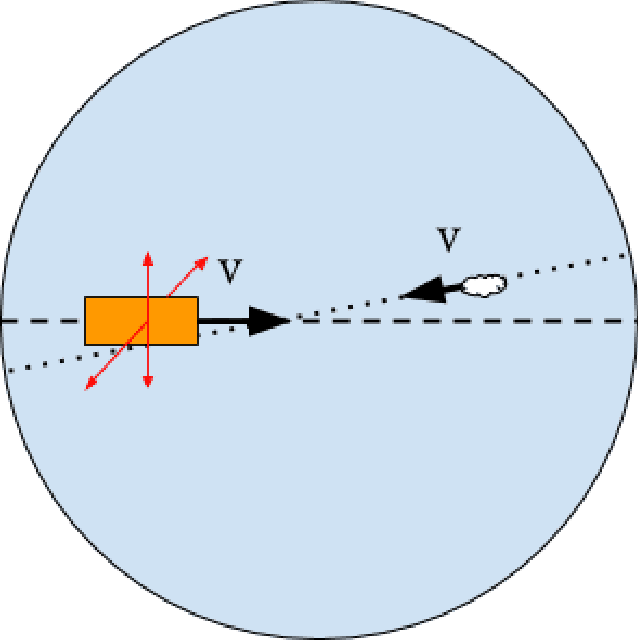
The rapid advancement and miniaturization of spacecraft electronics, sensors, actuators, and power systems have resulted in growing proliferation of small-spacecraft. Coupled with this is the growing number of rocket launches, with left-over debris marking their trail. The space debris problem has also been compounded by test of several satellite killer missiles that have left large remnant debris fields. In this paper, we assume a future in which the Kessler Effect has taken hold and analyze the implications on the design of small-satellites and CubeSats. We use a multiprong approach of surveying the latest technologies, including the ability to sense space debris in orbit, perform obstacle avoidance, have sufficient shielding to take on small impacts and other techniques to mitigate the problem. Detecting and tracking space debris threats on-orbit is expected to be an important approach and we will analyze the latest vision algorithms to perform the detection, followed by quick reaction control systems to perform the avoidance. Alternately there may be scenarios where the debris is too small to track and avoid. In this case, the spacecraft will need passive mitigation measures to survive the impact. Based on these conditions, we develop a strawman design of a small spacecraft to mitigate these challenges. Based upon this study, we identify if there is sufficient present-day COTS technology to mitigate or shield satellites from the problem. We conclude by outlining technology pathways that need to be advanced now to best prepare ourselves for the worst-case eventuality of Kessler Effect taking hold in the upper altitudes of Low Earth Orbit.
A Spring Propelled Extreme Environment Robot for Off-World Cave Exploration
Mar 19, 2019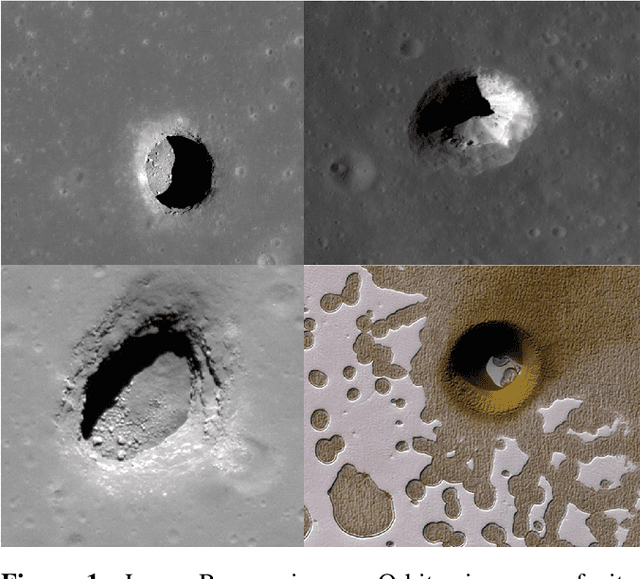

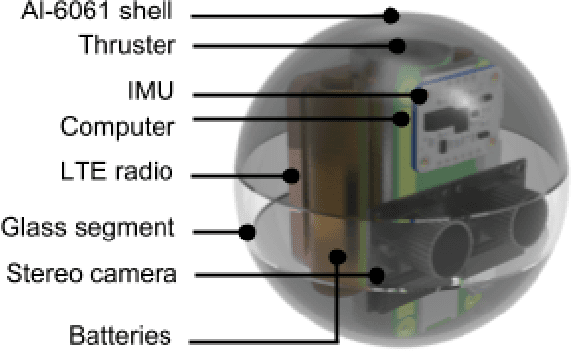
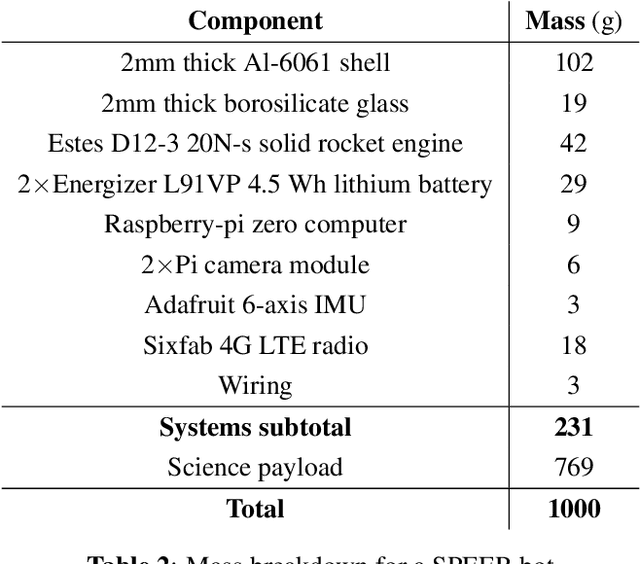
Pits on the Moon and Mars are intriguing geological formations that have yet to be explored. These geological formations can provide protection from harsh diurnal temperature variations, ionizing radiation, and meteorite impacts. Some have proposed that these underground formations are well-suited as human outposts. Some theorize that the Martian pits may harbor remnants of past life. Unfortunately, these geo-logical formations have been off-limits to conventional wheeled rovers and lander systems due to their collapsed ceiling or 'skylight' entrances. In this paper, a new low-cost method to explore these pits is presented using the Spring Propelled Extreme Environment Robot (SPEER). The SPEER consists of a launch system that flings disposable spherical microbots through skylights into the pits. The microbots are low-cost and composed of aluminium Al-6061 disposable spheres with an array of adapted COTS sensors and a solid rocket motor for soft landing.By moving most control authority to the launcher, the microbots become very simple, lightweight, and low-cost. We present a preliminary design of the microbots that can be built today using commercial components for under 500 USD. The microbots have a total mass of 1 kg, with more than 750 g available for a science instrument. In this paper, we present the design, dynamics and control, and operation of these microbots. This is followed by initial feasibility studies of the SPEER system by simulating exploration of a known Lunar pit in Mare Tranquillitatis.