 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPT-4 Generated Narratives of Life Events using a Structured Narrative Prompt: A Validation Study
Feb 08, 2024

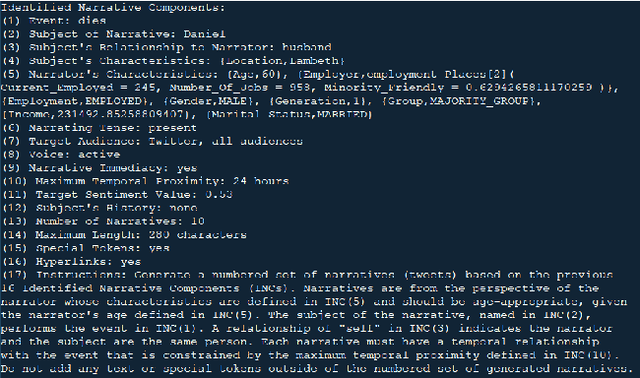

Large Language Models (LLMs) play a pivotal role in generating vast arrays of narratives, facilitating a systematic exploration of their effectiveness for communicating life events in narrative form. In this study, we employ a zero-shot structured narrative prompt to generate 24,000 narratives using OpenAI's GPT-4. From this dataset, we manually classify 2,880 narratives and evaluate their validity in conveying birth, death, hiring, and firing events. Remarkably, 87.43% of the narratives sufficiently convey the intention of the structured prompt. To automate the identification of valid and invalid narratives, we train and validate nine Machine Learning models on the classified datasets. Leveraging these models, we extend our analysis to predict the classifications of the remaining 21,120 narratives. All the ML models excelled at classifying valid narratives as valid, but experienced challenges at simultaneously classifying invalid narratives as invalid. Our findings not only advance the study of LLM capabilities, limitations, and validity but also offer practical insights for narrative generation and natural language processing applications.
Autonomous Multirobot Technologies for Mars Mining Base Construction and Operation
Oct 09, 2019

Beyond space exploration, the next critical step towards living and working in space requires developing a space economy. One important challenge with this space-economy is ensuring the low-cost transport of raw materials from one gravity-well to another. The escape delta-v of 11.2 km/s from Earth makes this proposition very expensive. Transporting materials from the Moon takes 2.4 km/s and from Mars 5.0 km/s. Based on these factors, the Moon and Mars can become colonies to export material into this space economy. One critical question is what are the resources required to sustain a space economy? Water has been identified as a critical resource both to sustain human-life but also for use in propulsion, attitude-control, power, thermal storage and radiation protection systems. Water may be obtained off-world through In-Situ Resource Utilization (ISRU) in the course of human or robotic space exploration. Based upon these important findings, we developed an energy model to determine the feasibility of developing a mining base on Mars that mines and exports water (transports water on a Mars escape trajectory). Our designs for a mining base utilize renewable energy sources namely photovoltaics and solar-thermal concentrators to provide power to construct the base, keep it operational and export the water using a mass driver (electrodynamic railgun). Our studies found the key to keeping the mining base simple and effective is to make it robotic. Teams of robots (consisting of 100 infrastructure robots) would be used to construct the entire base using locally available resources and fully operate the base. This would decrease energy needs by 5-folds. Furthermore, the base can be built 5-times faster using robotics and 3D printing. This shows that automation and robotics is the key to making such a base technologically feasible.