 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards an Optimal Hybrid Algorithm for EV Charging Stations Placement using Quantum Annealing and Genetic Algorithms
Nov 02, 2021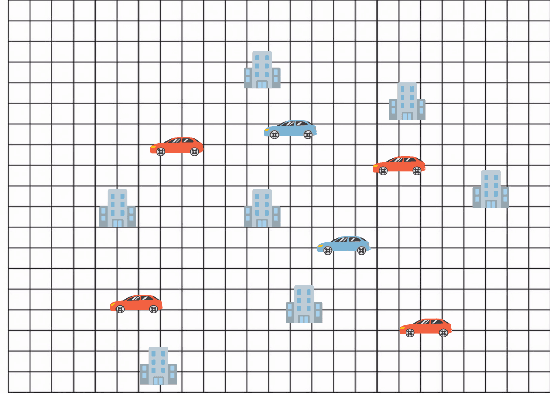
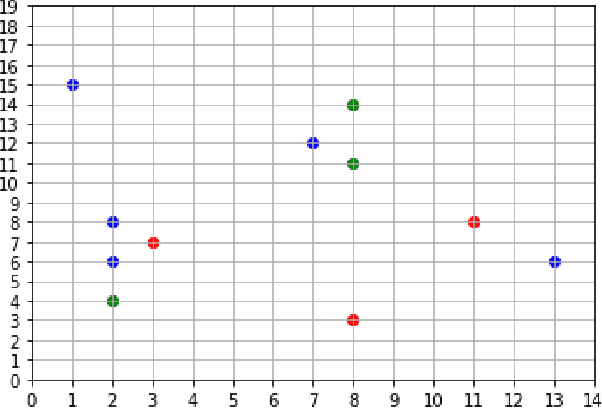
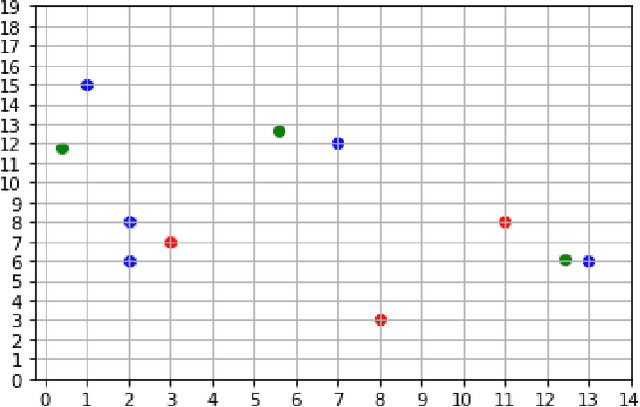
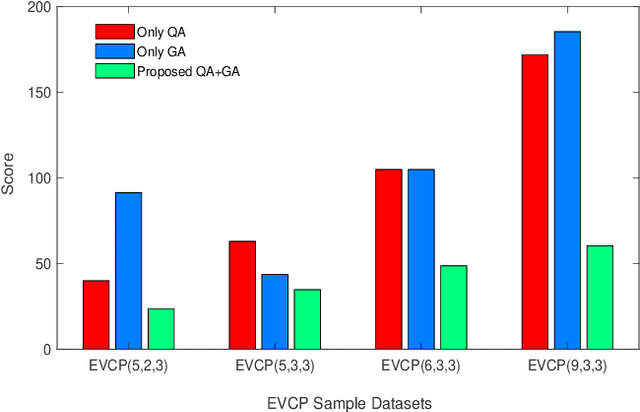
Quantum Annealing is a heuristic for solving optimization problems that have seen a recent surge in usage owing to the success of D-Wave Systems. This paper aims to find a good heuristic for solving the Electric Vehicle Charger Placement (EVCP) problem, a problem that stands to be very important given the costs of setting up an electric vehicle (EV) charger and the expected surge in electric vehicles across the world. The same problem statement can also be generalised to the optimal placement of any entity in a grid and can be explored for further uses. Finally, the authors introduce a novel heuristic combining Quantum Annealing and Genetic Algorithms to solve the problem. The proposed hybrid approach entails seeding the genetic algorithm with the results of a quantum annealer. Our experiments show this method decreases the minimum distance from POIs by 42.89% compared to vanilla quantum annealing over our sample EVCP datasets.
Autonomous Multirobot Technologies for Mars Mining Base Construction and Operation
Oct 09, 2019
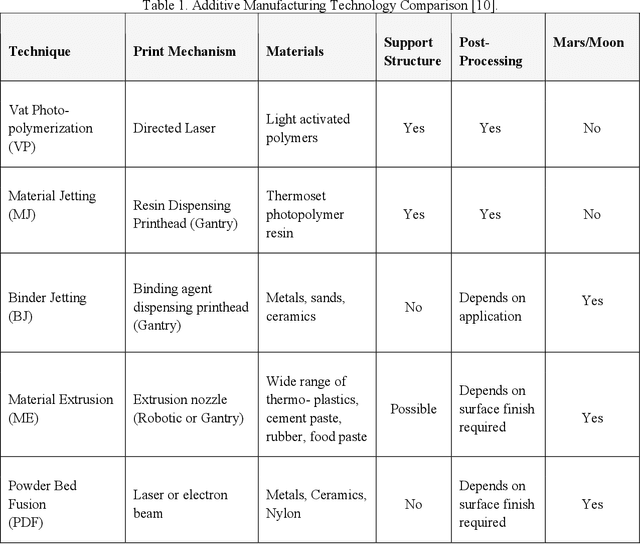
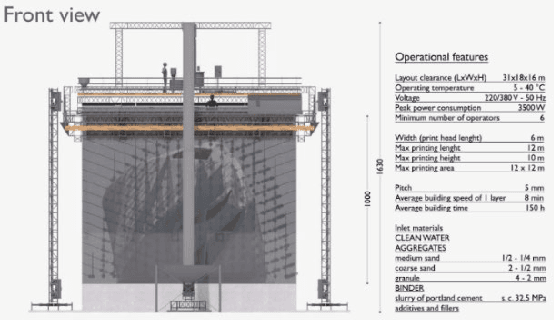

Beyond space exploration, the next critical step towards living and working in space requires developing a space economy. One important challenge with this space-economy is ensuring the low-cost transport of raw materials from one gravity-well to another. The escape delta-v of 11.2 km/s from Earth makes this proposition very expensive. Transporting materials from the Moon takes 2.4 km/s and from Mars 5.0 km/s. Based on these factors, the Moon and Mars can become colonies to export material into this space economy. One critical question is what are the resources required to sustain a space economy? Water has been identified as a critical resource both to sustain human-life but also for use in propulsion, attitude-control, power, thermal storage and radiation protection systems. Water may be obtained off-world through In-Situ Resource Utilization (ISRU) in the course of human or robotic space exploration. Based upon these important findings, we developed an energy model to determine the feasibility of developing a mining base on Mars that mines and exports water (transports water on a Mars escape trajectory). Our designs for a mining base utilize renewable energy sources namely photovoltaics and solar-thermal concentrators to provide power to construct the base, keep it operational and export the water using a mass driver (electrodynamic railgun). Our studies found the key to keeping the mining base simple and effective is to make it robotic. Teams of robots (consisting of 100 infrastructure robots) would be used to construct the entire base using locally available resources and fully operate the base. This would decrease energy needs by 5-folds. Furthermore, the base can be built 5-times faster using robotics and 3D printing. This shows that automation and robotics is the key to making such a base technologically feasible.
Grid-based Localization Stack for Inspection Drones towards Automation of Large Scale Warehouse Systems
Jun 04, 2019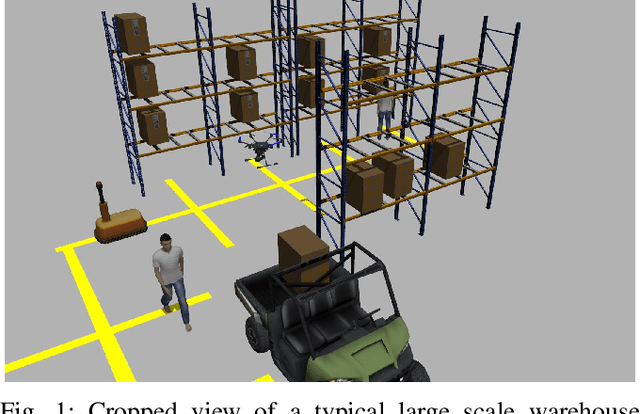
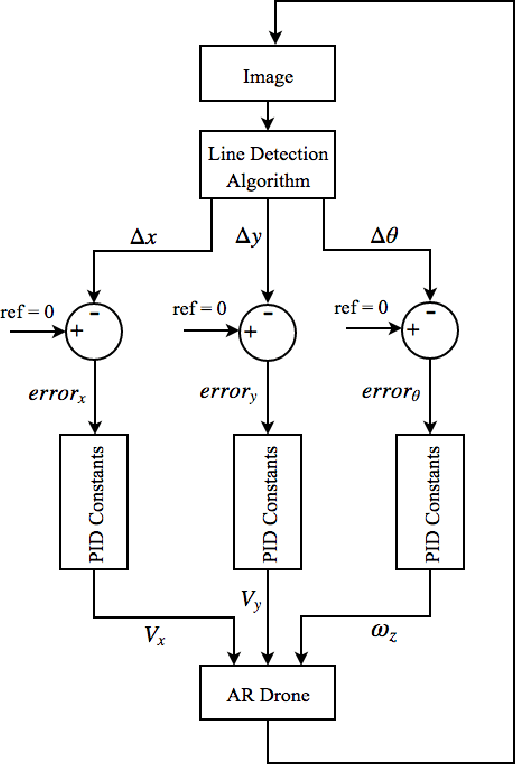
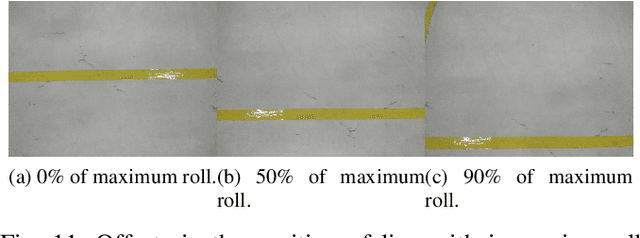
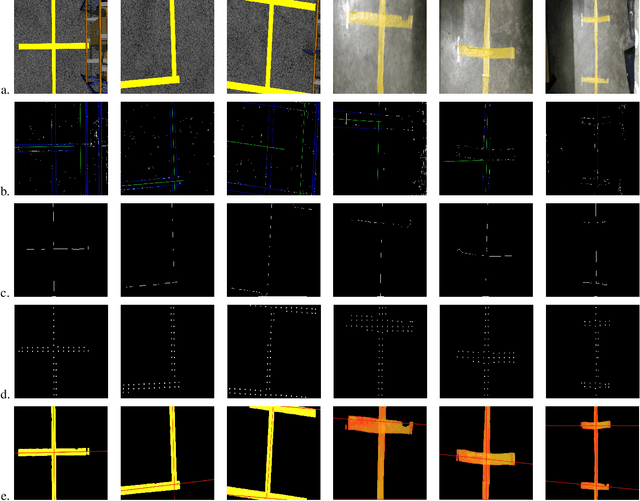
SLAM based techniques are often adopted for solving the navigation problem for the drones in GPS denied environment. Despite the widespread success of these approaches, they have not yet been fully exploited for automation in a warehouse system due to expensive sensors and setup requirements. This paper focuses on the use of low-cost monocular camera-equipped drones for performing warehouse management tasks like inventory scanning and position update. The methods introduced are at par with the existing state of warehouse environment present today, that is, the existence of a grid network for the ground vehicles, hence eliminating any additional infrastructure requirement for drone deployment. As we lack scale information, that in itself forbids us to use any 3D techniques, we focus more towards optimizing standard image processing algorithms like the thick line detection and further developing it into a fast and robust grid localization framework. In this paper, we show different line detection algorithms, their significance in grid localization and their limitations. We further extend our proposed implementation towards a real-time navigation stack for an actual warehouse inspection case scenario. Our line detection method using skeletonization and centroid strategy works considerably even with varying light conditions, line thicknesses, colors, orientations, and partial occlusions. A simple yet effective Kalman Filter has been used for smoothening the {\rho} and {\theta} outputs of the two different line detection methods for better drone control while grid following. A generic strategy that handles the navigation of the drone on a grid for completion of the allotted task is also developed. Based on the simulation and real-life experiments, the final developments on the drone localization and navigation in a structured environment are discussed.
End to End Satellite Servicing and Space Debris Management
Feb 18, 2019


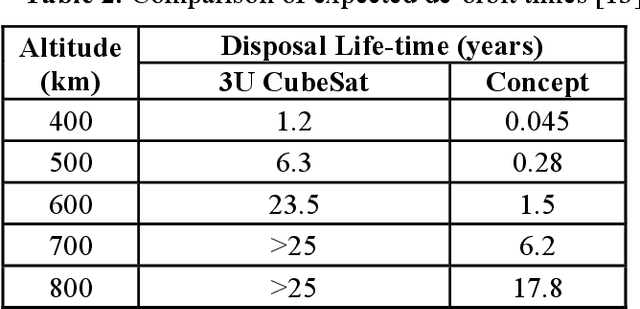
There is growing demand for satellite swarms and constellations for global positioning, remote sensing and relay communication in higher LEO orbits. This will result in many obsolete, damaged and abandoned satellites that will remain on-orbit beyond 25 years. These abandoned satellites and space debris maybe economically valuable orbital real-estate and resources that can be reused, repaired or upgraded for future use. Space traffic management is critical to repair damaged satellites, divert satellites into warehouse orbits and effectively de-orbit satellites and space debris that are beyond repair and salvage. Current methods for on-orbit capture, servicing and repair require a large service satellite. However, by accessing abandoned satellites and space debris, there is an inherent heightened risk of damage to a servicing spacecraft. Sending multiple small-robots with each robot specialized in a specific task is a credible alternative, as the system is simple and cost-effective and where loss of one or more robots does not end the mission. In this work, we outline an end to end multirobot system to capture damaged and abandoned spacecraft for salvaging, repair and for de-orbiting. We analyze the feasibility of sending multiple, decentralized robots that can work cooperatively to perform capture of the target satellite as a first step, followed by crawling onto damage satellites to perform detailed mapping. After obtaining a detailed map of the satellite, the robots will proceed to either repair and replace or dismantle components for salvage operations. Finally, the remaining components will be packaged with a de-orbit device for accelerated de-orbit.
Attitude Control of an Inflatable Sailplane for Mars Exploration
Feb 15, 2019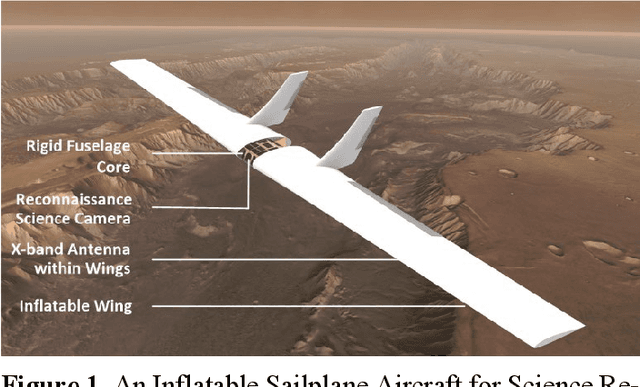
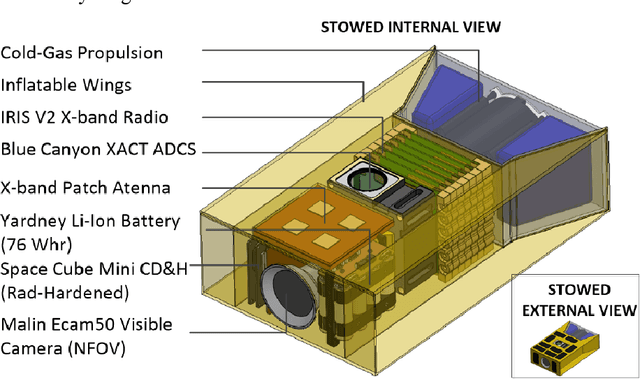
Exploration of Mars has been made possible using a series of landers, rovers and orbiters. The HiRise camera on the Mars Reconnaissance Orbiter (MRO) has captured high-resolution images covering large tracts of the surface. However, orbital images lack the depth and rich detail obtained from in-situ exploration. Rovers such as Mars Science Laboratory and upcoming Mars 2020 carry state-of-the-art science laboratories to perform in-situ exploration and analysis. However, they can only cover a small area of Mars through the course of their mission. A critical capability gap exists in our ability to image, provide services and explore large tracts of the surface of Mars required for enabling a future human mission. A promising solution is to develop a reconnaissance sailplane that travels tens to hundreds of kilometers per sol. The aircraft would be equipped with imagers that provide that in-situ depth of field, with coverage comparable to orbital assets such as MRO. A major challenge is that the Martian carbon dioxide atmosphere is thin, with a pres-sure of 1% of Earth at sea level. To compensate, the aircraft needs to fly at high-velocities and have sufficiently large wing area to generate the required lift. Inflatable wings are an excellent choice as they have the lowest mass and can be used to change shape (morph) depending on aerodynamic or con-trol requirements. In this paper, we present our design of an inflatable sail-plane capable of deploying from a 12U CubeSat platform. A pneumatic de-ployment mechanism ensures highly compact stowage volumes and minimizes complexity.
Guidance, Navigation and Control of Asteroid Mobile Imager and Geologic Observer (AMIGO)
Feb 06, 2019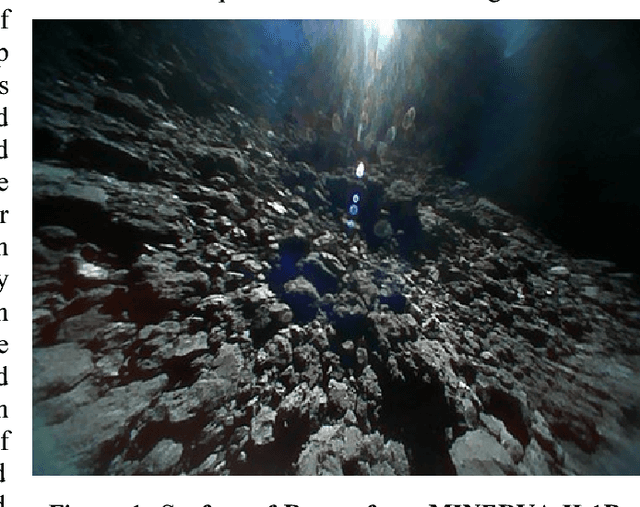

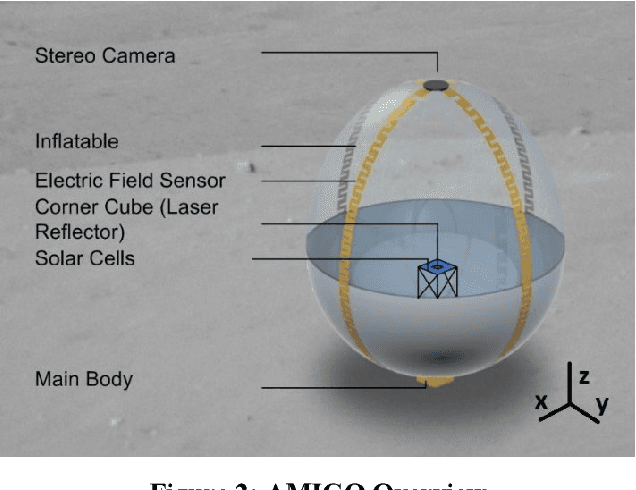

The science and origins of asteroids is deemed high priority in the Planetary Science Decadal Survey. Major scientific goals for the study of planetesimals are to decipher geological processes in SSSBs not determinable from investigation via in-situ experimentation, and to understand how planetesimals contribute to the formation of planets. Ground based observations are not sufficient to examine SSSBs, as they are only able to measure what is on the surface of the body; however, in-situ analysis allows for further, close up investigation as to the surface characteristics and the inner composure of the body. To this end, the Asteroid Mobile Imager and Geologic Observer (AMIGO) an autonomous semi-inflatable robot will operate in a swarm to efficiently characterize the surface of an asteroid. The stowed package is 10x10x10 cm (equivalent to a 1U CubeSat) that deploys an inflatable sphere of ~1m in diameter. Three mobility modes are identified and designed: ballistic hopping, rotation during hops, and up-righting maneuvers. Ballistic hops provide the AMIGO robot the ability to explore a larger portion of the asteroid's surface to sample a larger area than a stationary lander. Rotation during the hop entails attitude control of the robot, utilizing propulsion and reaction wheel actuation. In the event of the robot tipping or not landing up-right, a combination of thrusters and reaction wheels will correct the robot's attitude. The AMIGO propulsion system utilizes sublimate-based micro-electromechanical systems (MEMS) technology as a means of lightweight, low-thrust ballistic hopping and coarse attitude control. Each deployed AMIGO will hop across the surface of the asteroid multiple times.