 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment and Testing of an Engineering Model for an Asteroid Hopping Robot
Oct 09, 2019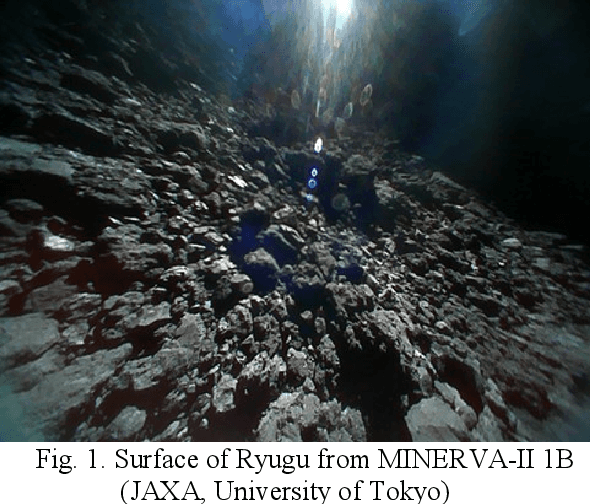
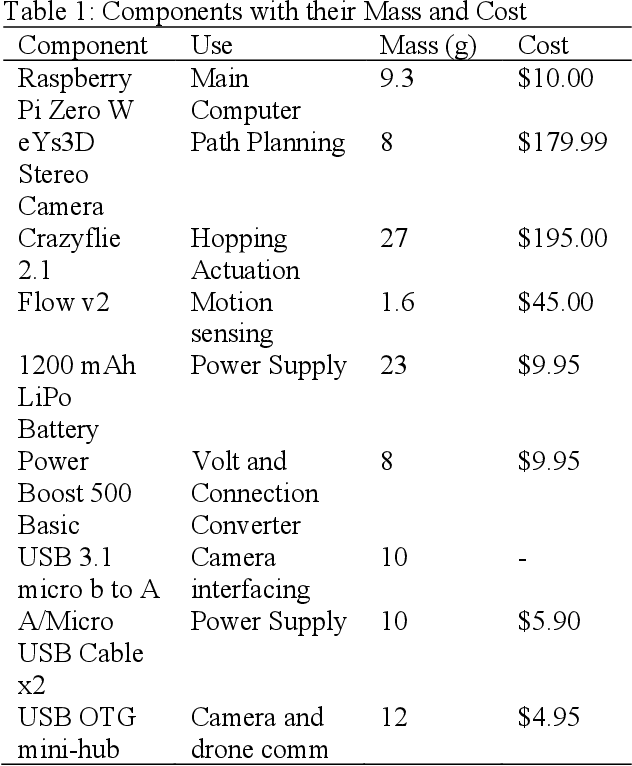
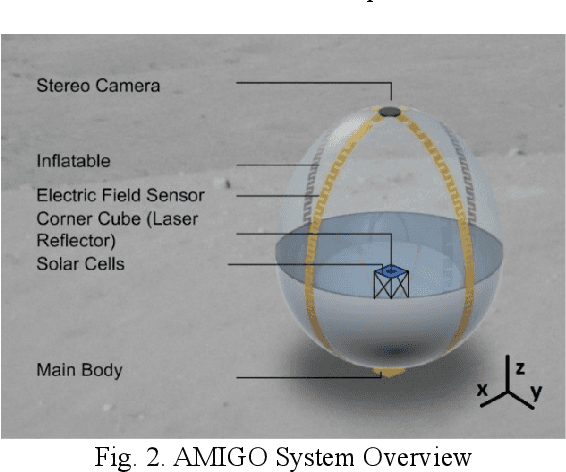
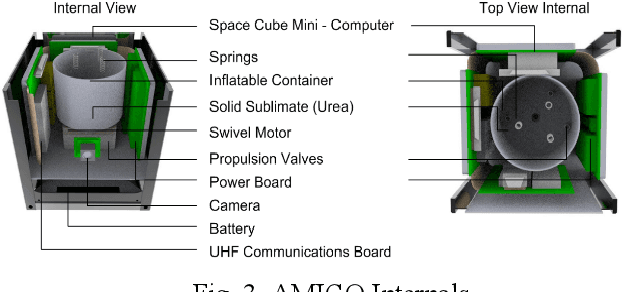
The science and origins of asteroids is deemed high priority in the Planetary Science Decadal Survey. Two of the main questions from the Decadal Survey pertain to what the "initial stages, conditions, and processes of solar system formation and the nature of the interstellar matter" that was present in the protoplanetary disk, as well as determining the "primordial sources for organic matter." Major scientific goals for the study of planetesimals are to decipher geological processes in SSSBs not determinable from investigation via in situ experimentation, and to understand how planetesimals contribute to the formation of planets. Ground based observations are not sufficient to examine SSSBs, as they are only able to measure what is on the surface of the body; however, in situ analysis allows for further, close up investigation as to the surface characteristics and the inner composure of the body. The Asteroid Mobile Imager and Geologic Observer (AMIGO) is a 1U stowed autonomous robot that can perform surface hopping on an asteroid with an inflatable structure. It contains science instruments to provide stereo context imaging, micro-imaging, seismic sensing, and electric field measurements. Multiple hopping robots are deployed as a team to eliminate single-point failure and add robustness to data collection. An on-board attitude control system consists of a thruster chip of discretized micro-nozzles that provides hopping thrust and a reaction wheel for controlling the third axis. For the continued development of the robot, an engineering model is developed to test various components and algorithms.
Guidance, Navigation and Control of Asteroid Mobile Imager and Geologic Observer (AMIGO)
Feb 06, 2019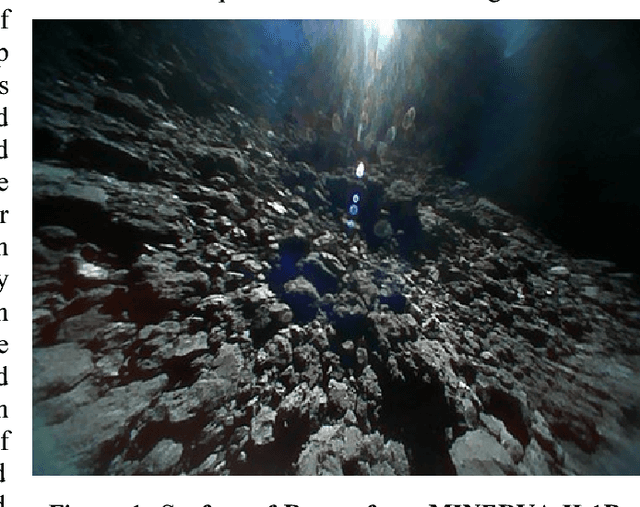

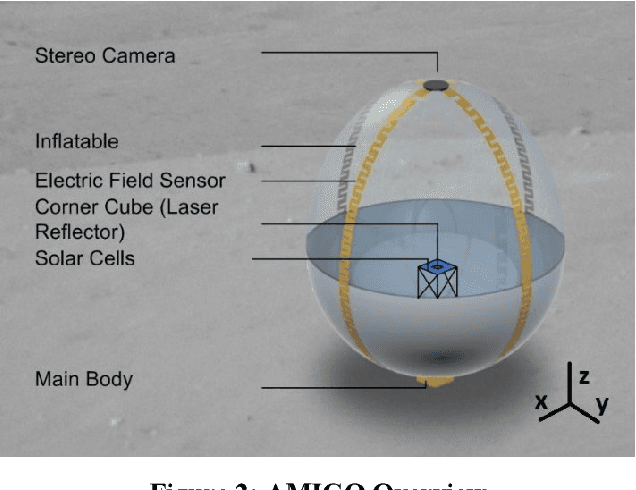

The science and origins of asteroids is deemed high priority in the Planetary Science Decadal Survey. Major scientific goals for the study of planetesimals are to decipher geological processes in SSSBs not determinable from investigation via in-situ experimentation, and to understand how planetesimals contribute to the formation of planets. Ground based observations are not sufficient to examine SSSBs, as they are only able to measure what is on the surface of the body; however, in-situ analysis allows for further, close up investigation as to the surface characteristics and the inner composure of the body. To this end, the Asteroid Mobile Imager and Geologic Observer (AMIGO) an autonomous semi-inflatable robot will operate in a swarm to efficiently characterize the surface of an asteroid. The stowed package is 10x10x10 cm (equivalent to a 1U CubeSat) that deploys an inflatable sphere of ~1m in diameter. Three mobility modes are identified and designed: ballistic hopping, rotation during hops, and up-righting maneuvers. Ballistic hops provide the AMIGO robot the ability to explore a larger portion of the asteroid's surface to sample a larger area than a stationary lander. Rotation during the hop entails attitude control of the robot, utilizing propulsion and reaction wheel actuation. In the event of the robot tipping or not landing up-right, a combination of thrusters and reaction wheels will correct the robot's attitude. The AMIGO propulsion system utilizes sublimate-based micro-electromechanical systems (MEMS) technology as a means of lightweight, low-thrust ballistic hopping and coarse attitude control. Each deployed AMIGO will hop across the surface of the asteroid multiple times.