 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuidance, Navigation and Control of Asteroid Mobile Imager and Geologic Observer (AMIGO)
Feb 06, 2019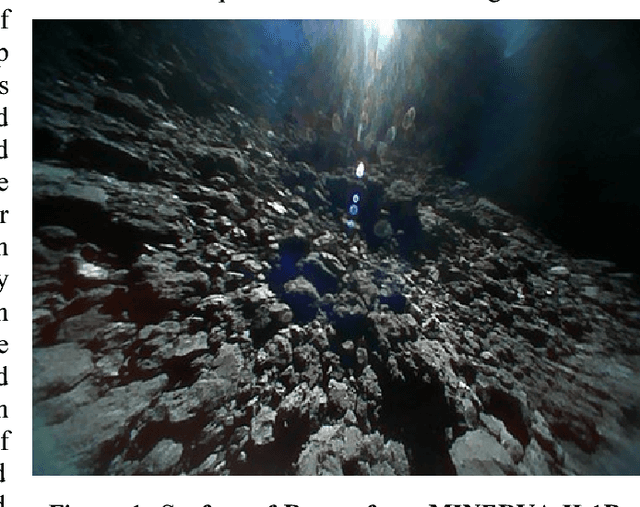

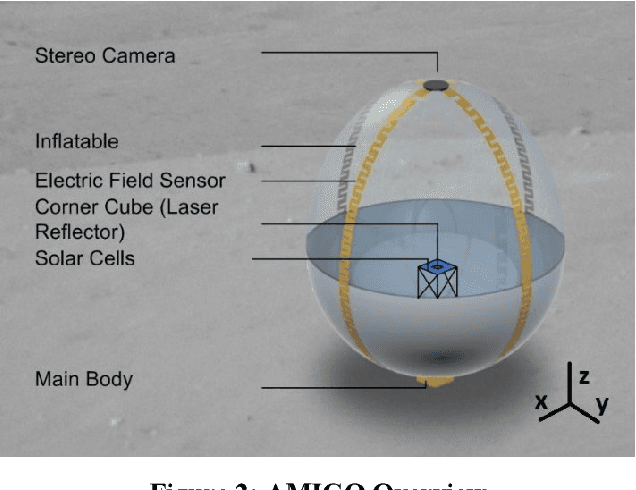

The science and origins of asteroids is deemed high priority in the Planetary Science Decadal Survey. Major scientific goals for the study of planetesimals are to decipher geological processes in SSSBs not determinable from investigation via in-situ experimentation, and to understand how planetesimals contribute to the formation of planets. Ground based observations are not sufficient to examine SSSBs, as they are only able to measure what is on the surface of the body; however, in-situ analysis allows for further, close up investigation as to the surface characteristics and the inner composure of the body. To this end, the Asteroid Mobile Imager and Geologic Observer (AMIGO) an autonomous semi-inflatable robot will operate in a swarm to efficiently characterize the surface of an asteroid. The stowed package is 10x10x10 cm (equivalent to a 1U CubeSat) that deploys an inflatable sphere of ~1m in diameter. Three mobility modes are identified and designed: ballistic hopping, rotation during hops, and up-righting maneuvers. Ballistic hops provide the AMIGO robot the ability to explore a larger portion of the asteroid's surface to sample a larger area than a stationary lander. Rotation during the hop entails attitude control of the robot, utilizing propulsion and reaction wheel actuation. In the event of the robot tipping or not landing up-right, a combination of thrusters and reaction wheels will correct the robot's attitude. The AMIGO propulsion system utilizes sublimate-based micro-electromechanical systems (MEMS) technology as a means of lightweight, low-thrust ballistic hopping and coarse attitude control. Each deployed AMIGO will hop across the surface of the asteroid multiple times.
On-Orbit Smart Camera System to Observe Illuminated and Unilluminated Space Objects
Sep 06, 2018

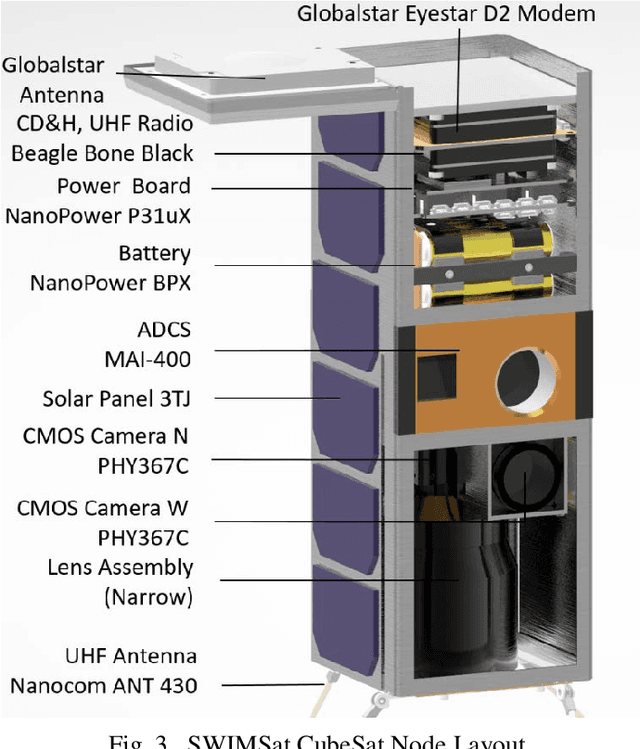
The wide availability of Commercial Off-The-Shelf (COTS) electronics that can withstand Low Earth Orbit conditions has opened avenue for wide deployment of CubeSats and small-satellites. CubeSats thanks to their low developmental and launch costs offer new opportunities for rapidly demonstrating on-orbit surveillance capabilities. In our earlier work, we proposed development of SWIMSat (Space based Wide-angle Imaging of Meteors) a 3U CubeSat demonstrator that is designed to observe illuminated objects entering the Earth's atmosphere. The spacecraft would operate autonomously using a smart camera with vision algorithms to detect, track and report of objects. Several CubeSats can track an object in a coordinated fashion to pinpoint an object's trajectory. An extension of this smart camera capability is to track unilluminated objects utilizing capabilities we have been developing to track and navigate to Near Earth Objects (NEOs). This extension enables detecting and tracking objects that can't readily be detected by humans. The system maintains a dense star map of the night sky and performs round the clock observations. Standard optical flow algorithms are used to obtain trajectories of all moving objects in the camera field of view. Through a process of elimination, certain stars maybe occluded by a transiting unilluminated object which is then used to first detect and obtain a trajectory of the object. Using multiple cameras observing the event from different points of view, it may be possible then to triangulate the position of the object in space and obtain its orbital trajectory. In this work, the performance of our space object detection algorithm coupled with a spacecraft guidance, navigation, and control system is demonstrated.
Network of Nano-Landers for In-Situ Characterization of Asteroid Impact Studies
Sep 09, 2017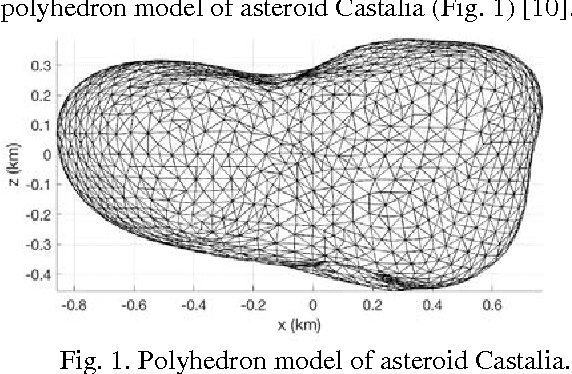
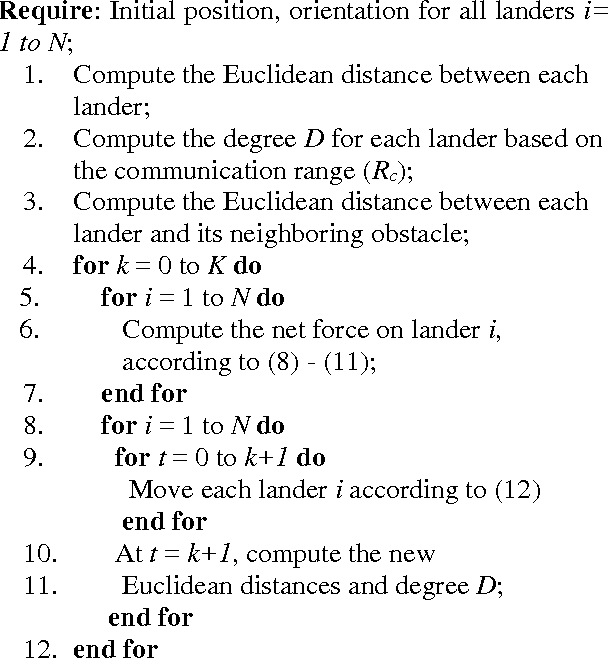
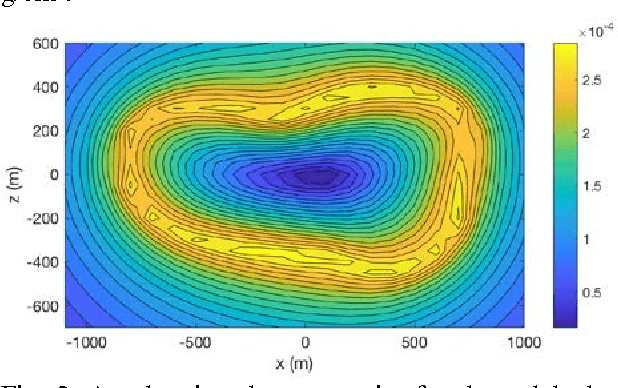

Exploration of asteroids and comets can give insight into the origins of the solar system and can be instrumental in planetary defence and in-situ resource utilization (ISRU). Asteroids, due to their low gravity are a challenging target for surface exploration. Current missions envision performing touch-and-go operations over an asteroid surface. In this work, we analyse the feasibility of sending scores of nano-landers, each 1 kg in mass and volume of 1U, or 1000 cm3. These landers would hop, roll and fly over the asteroid surface. The landers would include science instruments such as stereo cameras, hand-lens imagers and spectrometers to characterize rock composition. A network of nano-landers situated on the surface of an asteroid can provide unique and very detailed measurements of a spacecraft impacting onto an asteroid surface. A full-scale, artificial impact experiment onto an asteroid can help characterize its composition and geology and help in the development of asteroid deflection techniques intended for planetary defence. Scores of nano-landers could provide multiple complementary views of the impact, resultant seismic activity and trajectory of the ejecta. The nano-landers can analyse the pristine, unearthed regolith shielded from effects of UV and cosmic rays and that may be millions of years old. Our approach to formulating this mission concepts utilizes automated machine learning techniques in the planning and design of space systems. We use a form of Darwinian selection to select and identify suitable number of nano-landers, the on-board instruments and control system to explore and navigate the asteroid environment. Scenarios are generated in simulation and evaluated against quantifiable mission goals such as area explored on the asteroid and amount of data recorded from the impact event.
Optimized Bucket Wheel Design for Asteroid Excavation
Jan 26, 2017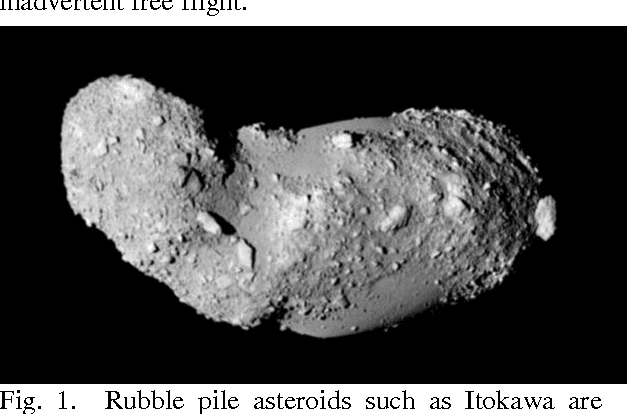
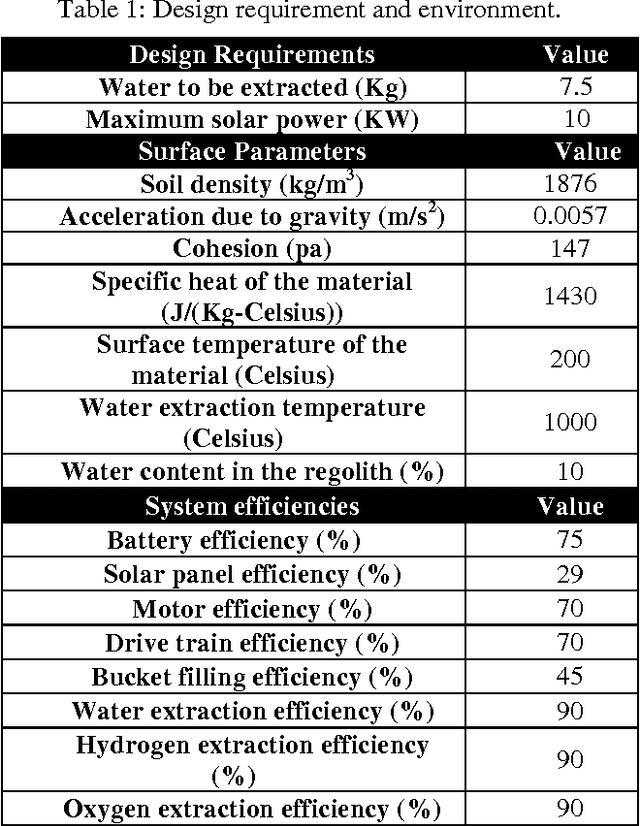
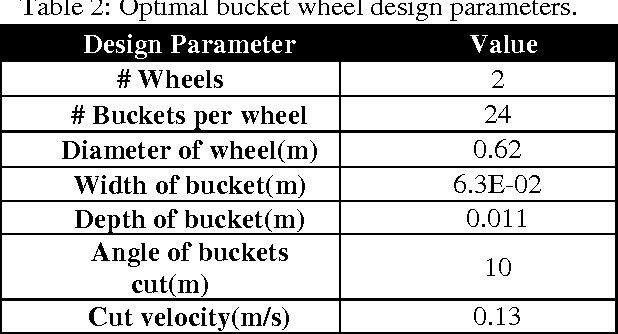
Current spacecraft need to launch with all of their required fuel for travel. This limits the system performance, payload capacity, and mission flexibility. One compelling alternative is to perform In-Situ Resource Utilization (ISRU) by extracting fuel from small bodies in local space such as asteroids or small satellites. Compared to the Moon or Mars, the microgravity on an asteroid demands a fraction of the energy for digging and accessing hydrated regolith just below the surface. Previous asteroid excavation efforts have focused on discrete capture events (an extension of sampling technology) or whole-asteroid capture and processing. This paper proposes an optimized bucket wheel design for surface excavation of an asteroid or small-body. Asteroid regolith is excavated and water extracted for use as rocket propellant. Our initial study focuses on system design, bucket wheel mechanisms, and capture dynamics applied to ponded materials known to exist on asteroids like Itokawa and Eros and small satellites like Phobos and Deimos. For initial evaluation of material-spacecraft dynamics and mechanics, we assume lunar-like regolith for bulk density, particle size and cohesion. We shall present our estimates for the energy balance of excavation and processing versus fuel gained. Conventional electrolysis of water is used to produce hydrogen and oxygen. It is compared with steam for propulsion and both show significant delta-v. We show that a return trip from Deimos to Earth is possible for a 12 kg craft using ISRU processed fuel.