 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-Orbit Smart Camera System to Observe Illuminated and Unilluminated Space Objects
Sep 06, 2018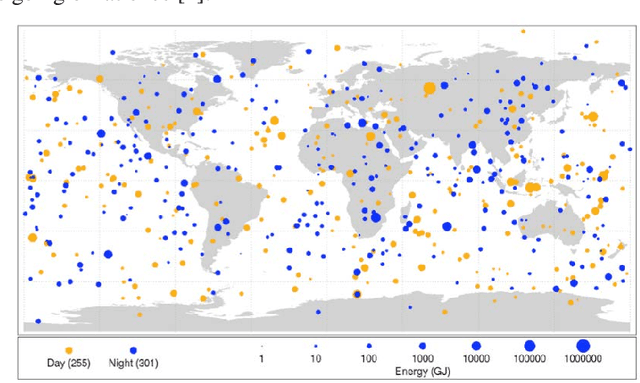

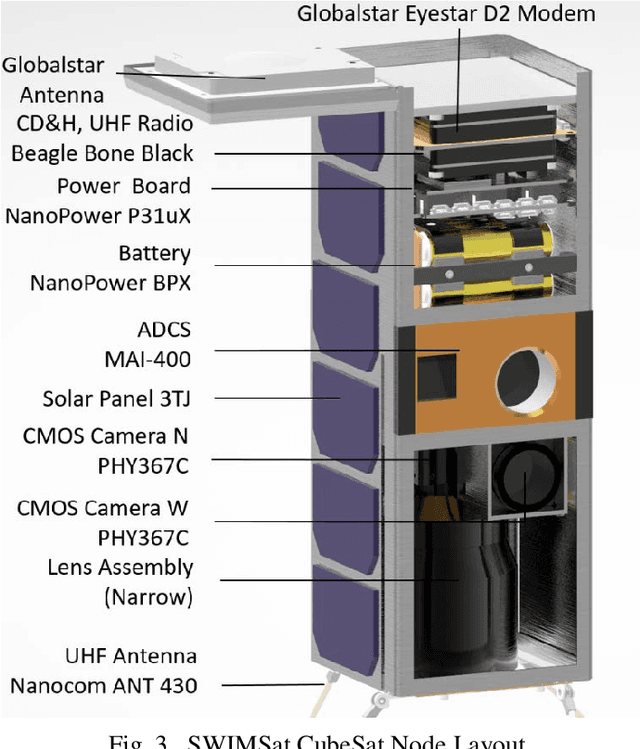
The wide availability of Commercial Off-The-Shelf (COTS) electronics that can withstand Low Earth Orbit conditions has opened avenue for wide deployment of CubeSats and small-satellites. CubeSats thanks to their low developmental and launch costs offer new opportunities for rapidly demonstrating on-orbit surveillance capabilities. In our earlier work, we proposed development of SWIMSat (Space based Wide-angle Imaging of Meteors) a 3U CubeSat demonstrator that is designed to observe illuminated objects entering the Earth's atmosphere. The spacecraft would operate autonomously using a smart camera with vision algorithms to detect, track and report of objects. Several CubeSats can track an object in a coordinated fashion to pinpoint an object's trajectory. An extension of this smart camera capability is to track unilluminated objects utilizing capabilities we have been developing to track and navigate to Near Earth Objects (NEOs). This extension enables detecting and tracking objects that can't readily be detected by humans. The system maintains a dense star map of the night sky and performs round the clock observations. Standard optical flow algorithms are used to obtain trajectories of all moving objects in the camera field of view. Through a process of elimination, certain stars maybe occluded by a transiting unilluminated object which is then used to first detect and obtain a trajectory of the object. Using multiple cameras observing the event from different points of view, it may be possible then to triangulate the position of the object in space and obtain its orbital trajectory. In this work, the performance of our space object detection algorithm coupled with a spacecraft guidance, navigation, and control system is demonstrated.