 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-Orbit Smart Camera System to Observe Illuminated and Unilluminated Space Objects
Sep 06, 2018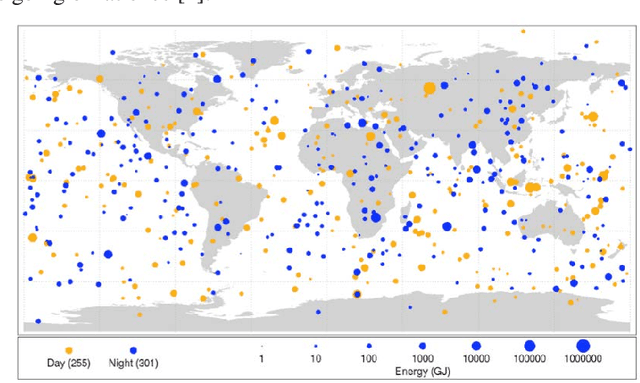

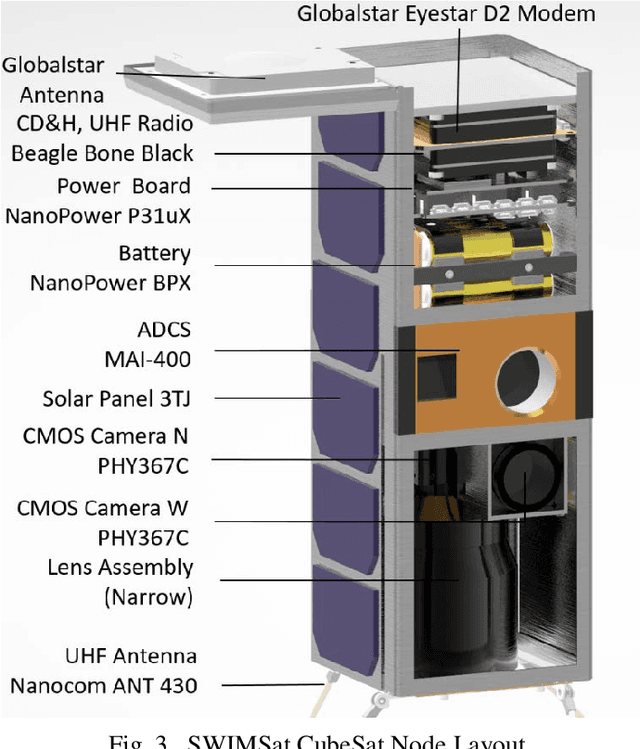
The wide availability of Commercial Off-The-Shelf (COTS) electronics that can withstand Low Earth Orbit conditions has opened avenue for wide deployment of CubeSats and small-satellites. CubeSats thanks to their low developmental and launch costs offer new opportunities for rapidly demonstrating on-orbit surveillance capabilities. In our earlier work, we proposed development of SWIMSat (Space based Wide-angle Imaging of Meteors) a 3U CubeSat demonstrator that is designed to observe illuminated objects entering the Earth's atmosphere. The spacecraft would operate autonomously using a smart camera with vision algorithms to detect, track and report of objects. Several CubeSats can track an object in a coordinated fashion to pinpoint an object's trajectory. An extension of this smart camera capability is to track unilluminated objects utilizing capabilities we have been developing to track and navigate to Near Earth Objects (NEOs). This extension enables detecting and tracking objects that can't readily be detected by humans. The system maintains a dense star map of the night sky and performs round the clock observations. Standard optical flow algorithms are used to obtain trajectories of all moving objects in the camera field of view. Through a process of elimination, certain stars maybe occluded by a transiting unilluminated object which is then used to first detect and obtain a trajectory of the object. Using multiple cameras observing the event from different points of view, it may be possible then to triangulate the position of the object in space and obtain its orbital trajectory. In this work, the performance of our space object detection algorithm coupled with a spacecraft guidance, navigation, and control system is demonstrated.
An Experimental Platform for Multi-spacecraft Phase-Array Communications
May 24, 2017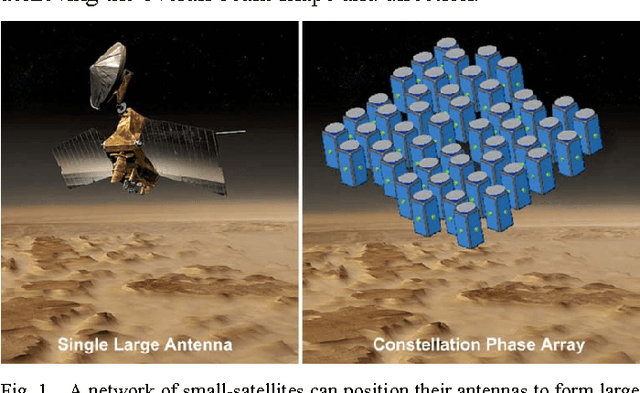
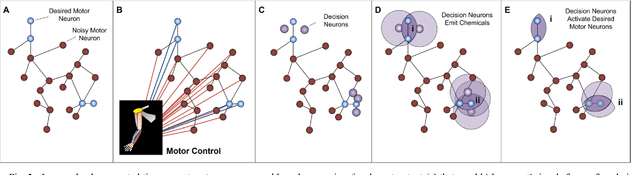

The emergence of small satellites and CubeSats for interplanetary exploration will mean hundreds if not thousands of spacecraft exploring every corner of the solar-system. Current methods for communication and tracking of deep space probes use ground based systems such as the Deep Space Network (DSN). However, the increased communication demand will require radically new methods to ease communication congestion. Networks of communication relay satellites located at strategic locations such as geostationary orbit and Lagrange points are potential solutions. Instead of one large communication relay satellite, we could have scores of small satellites that utilize phase arrays to effectively operate as one large satellite. Excess payload capacity on rockets can be used to warehouse more small satellites in the communication network. The advantage of this network is that even if one or a few of the satellites are damaged or destroyed, the network still operates but with degraded performance. The satellite network would operate in a distributed architecture and some satellites maybe dynamically repurposed to split and communicate with multiple targets at once. The potential for this alternate communication architecture is significant, but this requires development of satellite formation flying and networking technologies. Our research has found neural-network control approaches such as the Artificial Neural Tissue can be effectively used to control multirobot/multi-spacecraft systems and can produce human competitive controllers. We have been developing a laboratory experiment platform called Athena to develop critical spacecraft control algorithms and cognitive communication methods. We briefly report on the development of the platform and our plans to gain insight into communication phase arrays for space.
Guidance, Navigation and Control of Multirobot Systems in Cooperative Cliff Climbing
Feb 21, 2017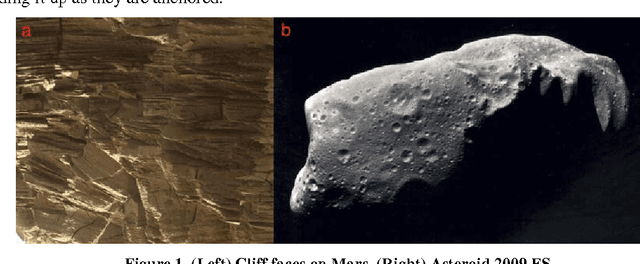

The application of GNC devices on small robots is a game-changer that enables these robots to be mobile on low-gravity planetary surfaces and small bodies. Use of reaction wheels enables these robots to roll, hop, summersault and rest on precarious/sloped surfaces that would otherwise not be possible with conven-tional wheeled robots. We are extending this technology to enable robots to climb off-world canyons, cliffs and caves. A single robot may slip and fall, however, a multirobot system can work cooperatively by being interlinked using spring-tethers and work much like a team of mountaineers to systematically climb a slope. A multirobot system as we will show in this paper can climb sur-faces not possible with a single robot alone. We consider a team of four robots that are interlinked with tethers in an 'x' configuration. Each robot secures itself to a slope using spiny gripping actuators, and one by one each robot moves up-wards by crawling, rolling or hopping up the slope. If any one of the robots loses grip, slips or falls, the remaining robots will be holding it up as they are anchored. This distributed controls approach to cliff climbing enables the system to reconfigure itself where possible and avoid getting stuck at one hard to reach location. Instead, the risk is distributed and through close cooperation, the robots can identify multiple trajectories to climb a cliff or rugged surface. The benefits can also be realized on milligravity surfaces such as asteroids. Too fast a jump can result in the robot flying off the surface into space. Having multiple robots anchored to the surface keeps the entire system secure. Our work combines dynamics and control simulation to evaluate the feasibility of our approach. The simulation results show a promising pathway towards advanced development of this technology on a team of real robots.
GNC of the SphereX Robot for Extreme Environment Exploration on Mars
Jan 31, 2017
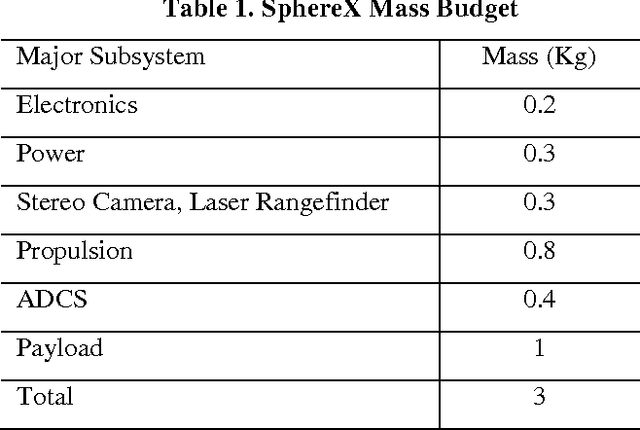

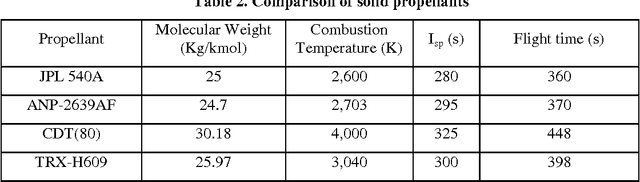
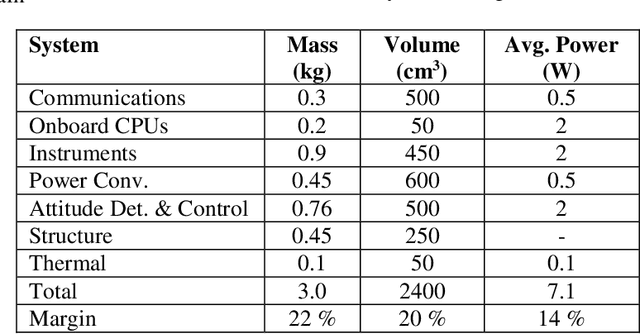
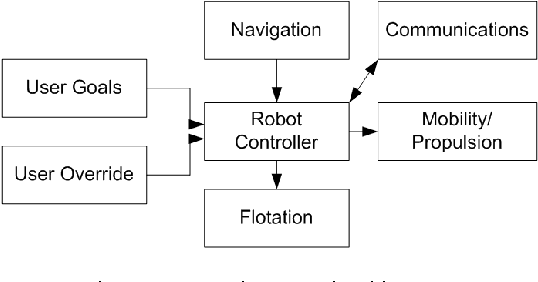
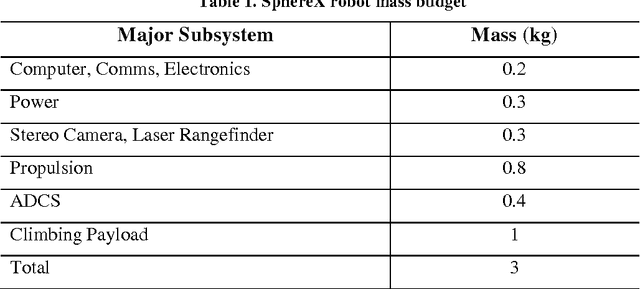
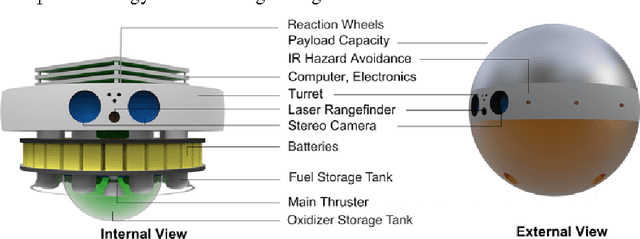
Wheeled ground robots are limited from exploring extreme environments such as caves, lava tubes and skylights. Small robots that can utilize unconventional mobility through hopping, flying or rolling can overcome these limitations. Mul-tiple robots operating as a team offer significant benefits over a single large ro-bot, as they are not prone to single-point failure, enable distributed command and control and enable execution of tasks in parallel. These robots can complement large rovers and landers, helping to explore inaccessible sites, obtaining samples and for planning future exploration missions. Our robots, the SphereX, are 3-kg in mass, spherical and contain computers equivalent to current smartphones. They contain an array of guidance, navigation and control sensors and electronics. SphereX contains room for a 1-kg science payload, including for sample return. Our work in this field has recognized the need for miniaturized chemical mobility systems that provide power and propulsion. Our research explored the use of miniature rockets, including solid rockets, bi-propellants including RP1/hydrogen-peroxide and polyurethane/ammonium-perchlorate. These propulsion options provide maximum flight times of 10 minutes on Mars. Flying, especially hovering consumes significant fuel; hence, we have been developing our robots to perform ballistic hops that enable the robots to travel efficiently over long distances. Techniques are being developed to enable mid-course correction during a ballistic hop. Using multiple cameras, it is possible to reconstitute an image scene from motion blur. Hence our approach is to enable photo mapping as the robots travel on a ballistic hop. The same images would also be used for navigation and path planning. Using our proposed design approach, we are developing low-cost methods for surface exploration of planetary bodies using a network of small robots.
Optimized Bucket Wheel Design for Asteroid Excavation
Jan 26, 2017
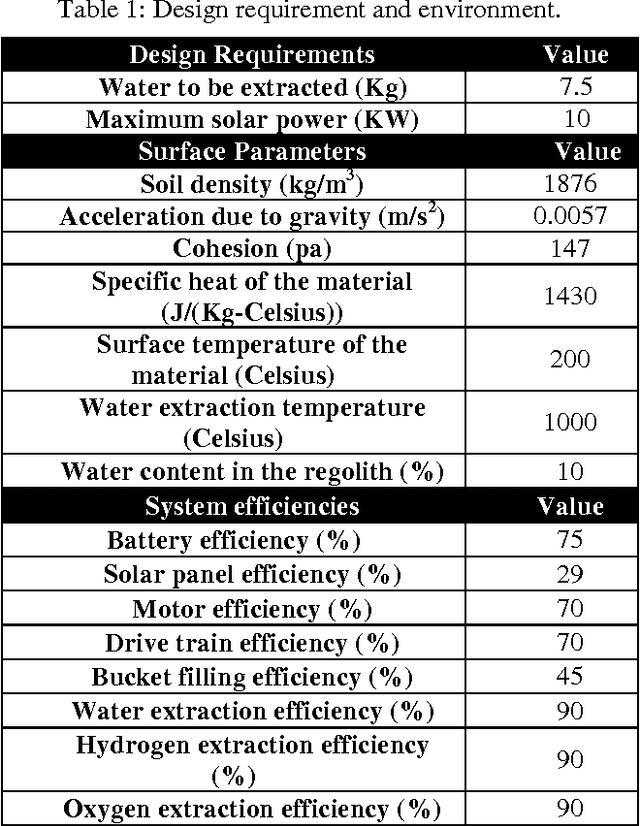
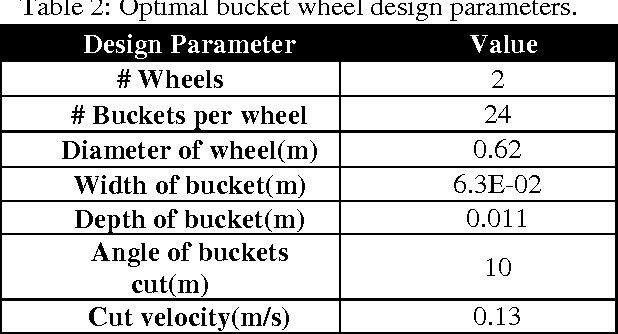
Current spacecraft need to launch with all of their required fuel for travel. This limits the system performance, payload capacity, and mission flexibility. One compelling alternative is to perform In-Situ Resource Utilization (ISRU) by extracting fuel from small bodies in local space such as asteroids or small satellites. Compared to the Moon or Mars, the microgravity on an asteroid demands a fraction of the energy for digging and accessing hydrated regolith just below the surface. Previous asteroid excavation efforts have focused on discrete capture events (an extension of sampling technology) or whole-asteroid capture and processing. This paper proposes an optimized bucket wheel design for surface excavation of an asteroid or small-body. Asteroid regolith is excavated and water extracted for use as rocket propellant. Our initial study focuses on system design, bucket wheel mechanisms, and capture dynamics applied to ponded materials known to exist on asteroids like Itokawa and Eros and small satellites like Phobos and Deimos. For initial evaluation of material-spacecraft dynamics and mechanics, we assume lunar-like regolith for bulk density, particle size and cohesion. We shall present our estimates for the energy balance of excavation and processing versus fuel gained. Conventional electrolysis of water is used to produce hydrogen and oxygen. It is compared with steam for propulsion and both show significant delta-v. We show that a return trip from Deimos to Earth is possible for a 12 kg craft using ISRU processed fuel.