 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGNC of the SphereX Robot for Extreme Environment Exploration on Mars
Paper and Code
Jan 31, 2017
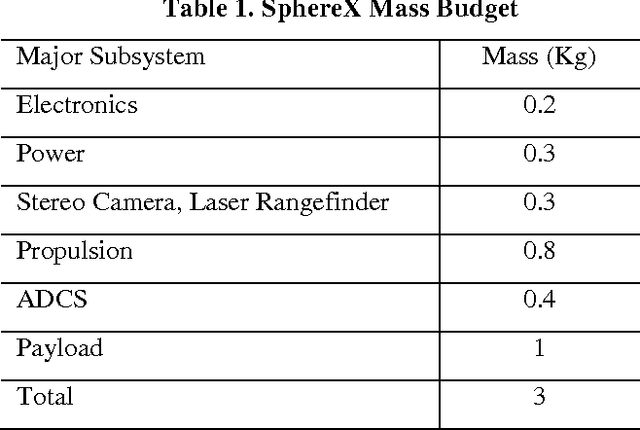

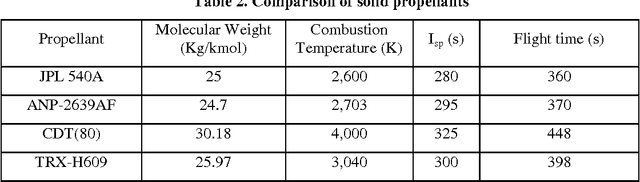
Wheeled ground robots are limited from exploring extreme environments such as caves, lava tubes and skylights. Small robots that can utilize unconventional mobility through hopping, flying or rolling can overcome these limitations. Mul-tiple robots operating as a team offer significant benefits over a single large ro-bot, as they are not prone to single-point failure, enable distributed command and control and enable execution of tasks in parallel. These robots can complement large rovers and landers, helping to explore inaccessible sites, obtaining samples and for planning future exploration missions. Our robots, the SphereX, are 3-kg in mass, spherical and contain computers equivalent to current smartphones. They contain an array of guidance, navigation and control sensors and electronics. SphereX contains room for a 1-kg science payload, including for sample return. Our work in this field has recognized the need for miniaturized chemical mobility systems that provide power and propulsion. Our research explored the use of miniature rockets, including solid rockets, bi-propellants including RP1/hydrogen-peroxide and polyurethane/ammonium-perchlorate. These propulsion options provide maximum flight times of 10 minutes on Mars. Flying, especially hovering consumes significant fuel; hence, we have been developing our robots to perform ballistic hops that enable the robots to travel efficiently over long distances. Techniques are being developed to enable mid-course correction during a ballistic hop. Using multiple cameras, it is possible to reconstitute an image scene from motion blur. Hence our approach is to enable photo mapping as the robots travel on a ballistic hop. The same images would also be used for navigation and path planning. Using our proposed design approach, we are developing low-cost methods for surface exploration of planetary bodies using a network of small robots.