 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFemtoSats for Exploring Permanently Shadowed Regions on the Moon
Dec 15, 2020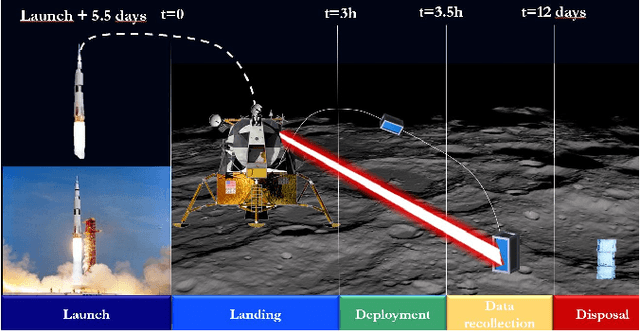
The recent, rapid advancement in space exploration is thanks to the accelerated miniaturization of electronics components on a spacecraft that is reducing the mass, volume and cost of satellites. Yet, access to space remains a distant dream as there is growing complexity in what is required of satellites and increasing space traffic. Interplanetary exploration is even harder and has limited possibilities for low cost mission. All of these factors make even CubeSats, the entry-level standard too expensive for most and therefore a better way needs to be found. The proposed solution in this report is a low-mass, low-cost, disposable solution that exploits the latest advances in electronics and is relatively easy to integrate: FemtoSats. FemtoSats are sub-100-gram spacecraft. The FemtoSat concept is based on launching a swarm where the main tasks are divided between the members of the swarm. This means that if one fails the swarm can take its place and therefore substitute it without risking the whole mission. In this paper we explore the utility of FemtoSats to perform first exploration and mapping of a Lunar PSR. This concept was recognized as finalist for the NASA BIG Competition in 2020. This is an example of a high-risk, high-reward mission where losing one FemtoSat does not mean the mission is in danger as it happens with regular satellite missions.
Development and Testing of an Engineering Model for an Asteroid Hopping Robot
Oct 09, 2019
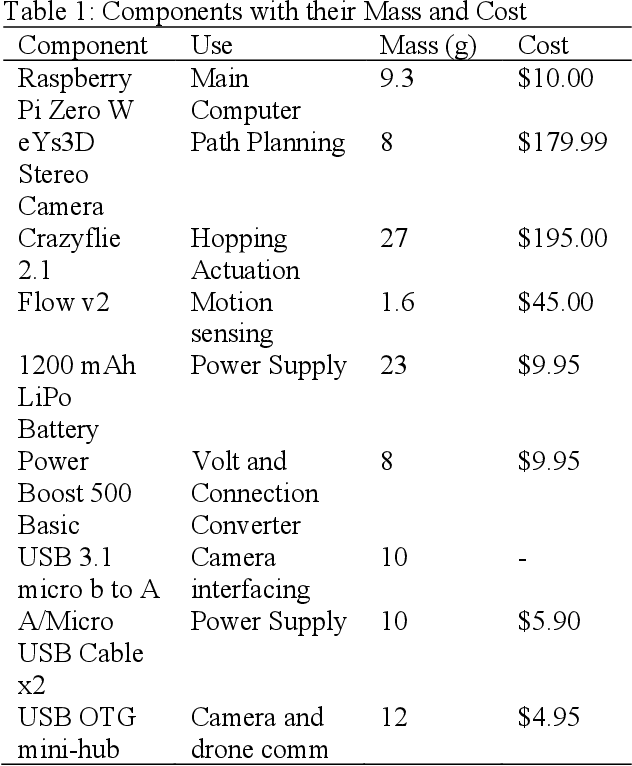
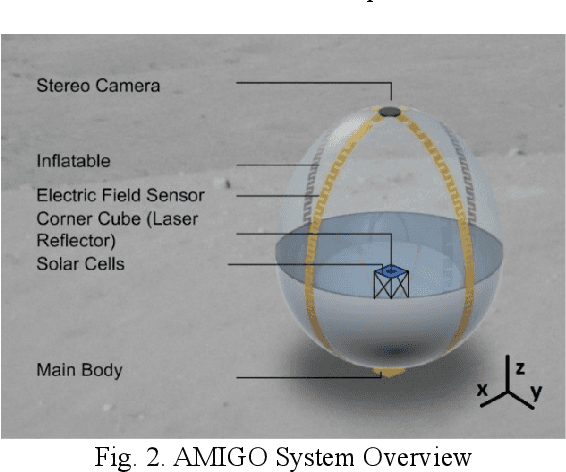
The science and origins of asteroids is deemed high priority in the Planetary Science Decadal Survey. Two of the main questions from the Decadal Survey pertain to what the "initial stages, conditions, and processes of solar system formation and the nature of the interstellar matter" that was present in the protoplanetary disk, as well as determining the "primordial sources for organic matter." Major scientific goals for the study of planetesimals are to decipher geological processes in SSSBs not determinable from investigation via in situ experimentation, and to understand how planetesimals contribute to the formation of planets. Ground based observations are not sufficient to examine SSSBs, as they are only able to measure what is on the surface of the body; however, in situ analysis allows for further, close up investigation as to the surface characteristics and the inner composure of the body. The Asteroid Mobile Imager and Geologic Observer (AMIGO) is a 1U stowed autonomous robot that can perform surface hopping on an asteroid with an inflatable structure. It contains science instruments to provide stereo context imaging, micro-imaging, seismic sensing, and electric field measurements. Multiple hopping robots are deployed as a team to eliminate single-point failure and add robustness to data collection. An on-board attitude control system consists of a thruster chip of discretized micro-nozzles that provides hopping thrust and a reaction wheel for controlling the third axis. For the continued development of the robot, an engineering model is developed to test various components and algorithms.
Automated Multidisciplinary Design and Control of Hopping Robots for Exploration of Extreme Environments on the Moon and Mars
Oct 09, 2019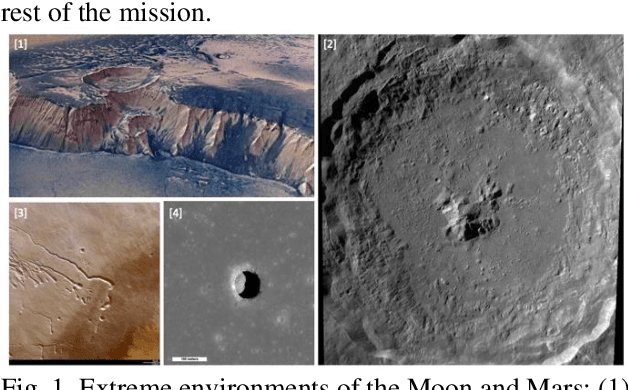
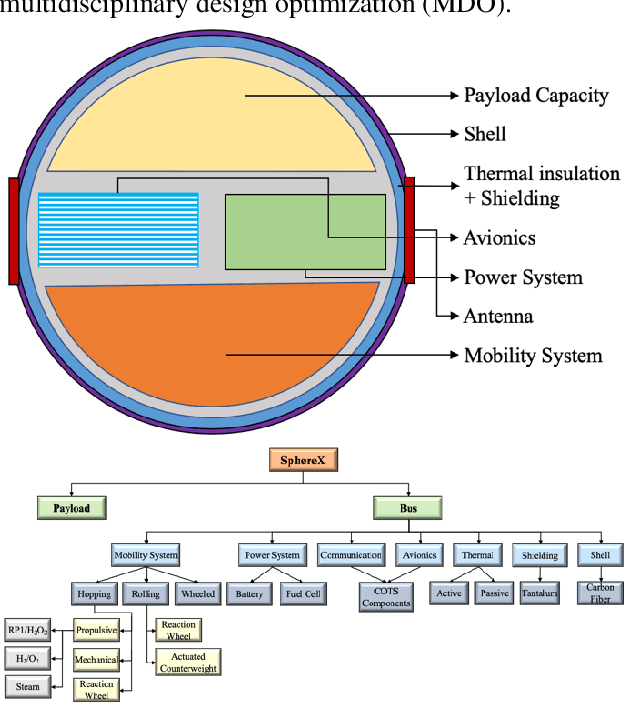
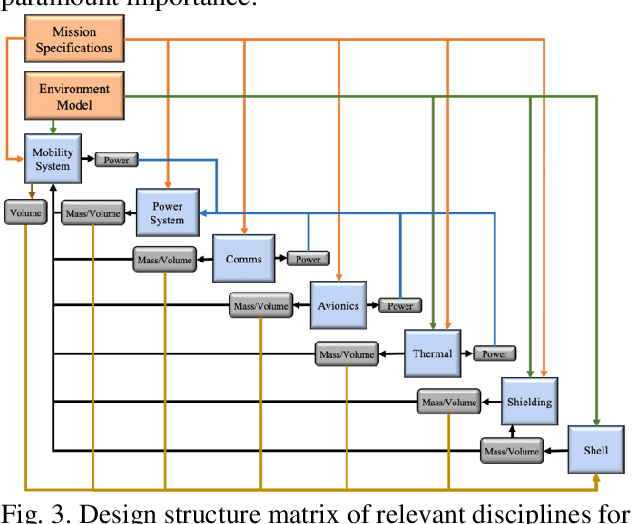
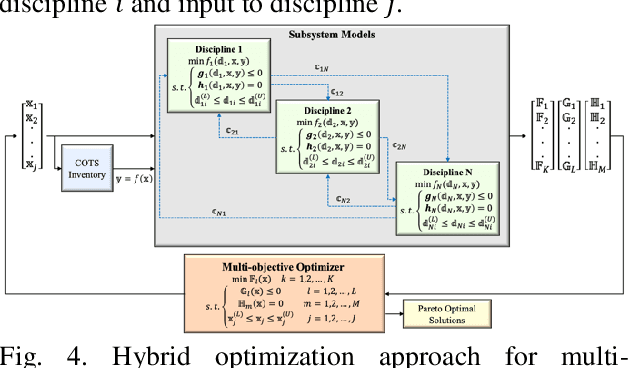
The next frontier in solar system exploration will be missions targeting extreme and rugged environments such as caves, canyons, cliffs and crater rims of the Moon, Mars and icy moons. These environments are time capsules into early formation of the solar system and will provide vital clues of how our early solar system gave way to the current planets and moons. These sites will also provide vital clues to the past and present habitability of these environments. Current landers and rovers are unable to access these areas of high interest due to limitations in precision landing techniques, need for large and sophisticated science instruments and a mission assurance and operations culture where risks are minimized at all costs. Our past work has shown the advantages of using multiple spherical hopping robots called SphereX for exploring these extreme environments. Our previous work was based on performing exploration with a human-designed baseline design of a SphereX robot. However, the design of SphereX is a complex task that involves a large number of design variables and multiple engineering disciplines. In this work we propose to use Automated Multidisciplinary Design and Control Optimization (AMDCO) techniques to find near optimal design solutions in terms of mass, volume, power, and control for SphereX for different mission scenarios.
Building Small-Satellites to Live Through the Kessler Effect
Sep 02, 2019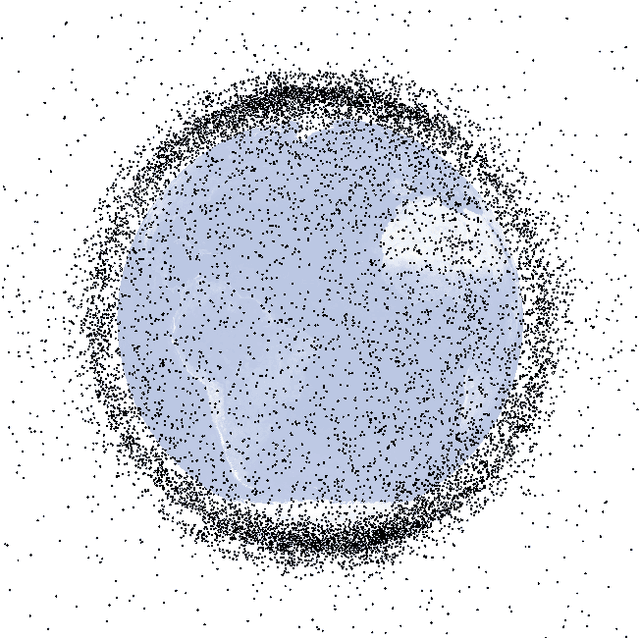
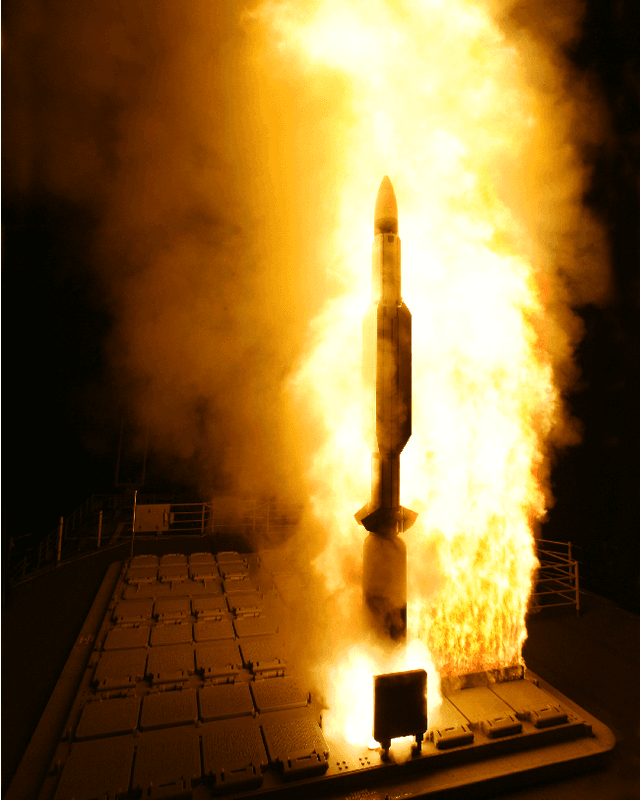
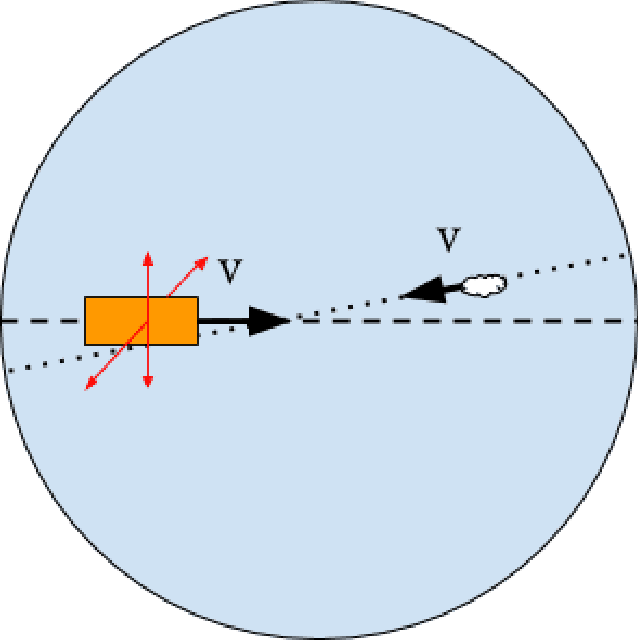
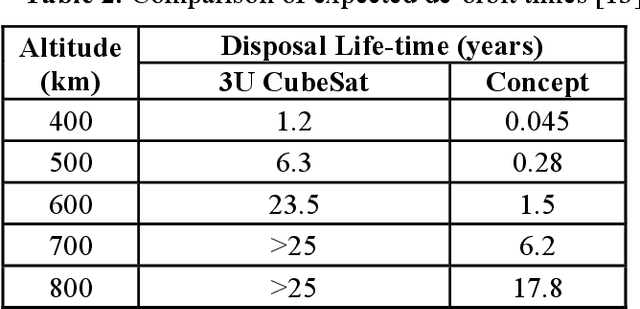
The rapid advancement and miniaturization of spacecraft electronics, sensors, actuators, and power systems have resulted in growing proliferation of small-spacecraft. Coupled with this is the growing number of rocket launches, with left-over debris marking their trail. The space debris problem has also been compounded by test of several satellite killer missiles that have left large remnant debris fields. In this paper, we assume a future in which the Kessler Effect has taken hold and analyze the implications on the design of small-satellites and CubeSats. We use a multiprong approach of surveying the latest technologies, including the ability to sense space debris in orbit, perform obstacle avoidance, have sufficient shielding to take on small impacts and other techniques to mitigate the problem. Detecting and tracking space debris threats on-orbit is expected to be an important approach and we will analyze the latest vision algorithms to perform the detection, followed by quick reaction control systems to perform the avoidance. Alternately there may be scenarios where the debris is too small to track and avoid. In this case, the spacecraft will need passive mitigation measures to survive the impact. Based on these conditions, we develop a strawman design of a small spacecraft to mitigate these challenges. Based upon this study, we identify if there is sufficient present-day COTS technology to mitigate or shield satellites from the problem. We conclude by outlining technology pathways that need to be advanced now to best prepare ourselves for the worst-case eventuality of Kessler Effect taking hold in the upper altitudes of Low Earth Orbit.
End to End Satellite Servicing and Space Debris Management
Feb 18, 2019


There is growing demand for satellite swarms and constellations for global positioning, remote sensing and relay communication in higher LEO orbits. This will result in many obsolete, damaged and abandoned satellites that will remain on-orbit beyond 25 years. These abandoned satellites and space debris maybe economically valuable orbital real-estate and resources that can be reused, repaired or upgraded for future use. Space traffic management is critical to repair damaged satellites, divert satellites into warehouse orbits and effectively de-orbit satellites and space debris that are beyond repair and salvage. Current methods for on-orbit capture, servicing and repair require a large service satellite. However, by accessing abandoned satellites and space debris, there is an inherent heightened risk of damage to a servicing spacecraft. Sending multiple small-robots with each robot specialized in a specific task is a credible alternative, as the system is simple and cost-effective and where loss of one or more robots does not end the mission. In this work, we outline an end to end multirobot system to capture damaged and abandoned spacecraft for salvaging, repair and for de-orbiting. We analyze the feasibility of sending multiple, decentralized robots that can work cooperatively to perform capture of the target satellite as a first step, followed by crawling onto damage satellites to perform detailed mapping. After obtaining a detailed map of the satellite, the robots will proceed to either repair and replace or dismantle components for salvage operations. Finally, the remaining components will be packaged with a de-orbit device for accelerated de-orbit.
Guidance, Navigation and Control of Asteroid Mobile Imager and Geologic Observer (AMIGO)
Feb 06, 2019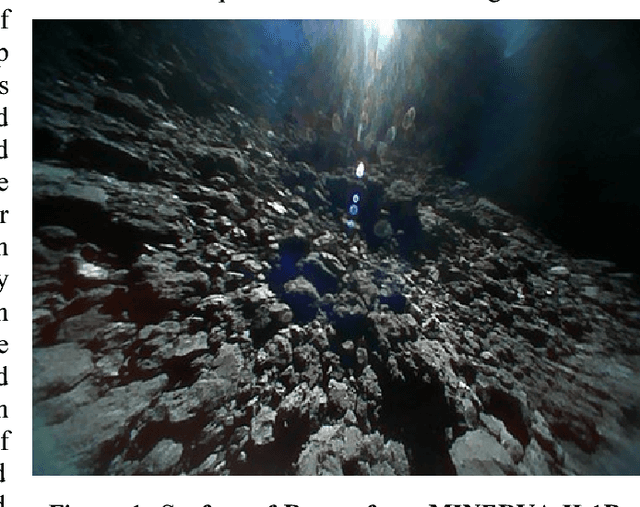

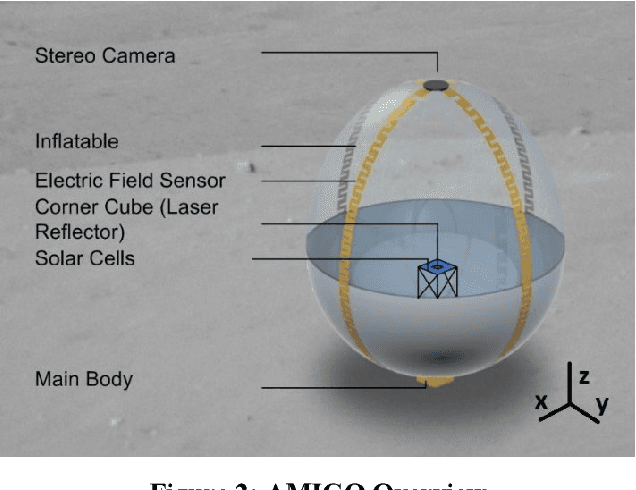

The science and origins of asteroids is deemed high priority in the Planetary Science Decadal Survey. Major scientific goals for the study of planetesimals are to decipher geological processes in SSSBs not determinable from investigation via in-situ experimentation, and to understand how planetesimals contribute to the formation of planets. Ground based observations are not sufficient to examine SSSBs, as they are only able to measure what is on the surface of the body; however, in-situ analysis allows for further, close up investigation as to the surface characteristics and the inner composure of the body. To this end, the Asteroid Mobile Imager and Geologic Observer (AMIGO) an autonomous semi-inflatable robot will operate in a swarm to efficiently characterize the surface of an asteroid. The stowed package is 10x10x10 cm (equivalent to a 1U CubeSat) that deploys an inflatable sphere of ~1m in diameter. Three mobility modes are identified and designed: ballistic hopping, rotation during hops, and up-righting maneuvers. Ballistic hops provide the AMIGO robot the ability to explore a larger portion of the asteroid's surface to sample a larger area than a stationary lander. Rotation during the hop entails attitude control of the robot, utilizing propulsion and reaction wheel actuation. In the event of the robot tipping or not landing up-right, a combination of thrusters and reaction wheels will correct the robot's attitude. The AMIGO propulsion system utilizes sublimate-based micro-electromechanical systems (MEMS) technology as a means of lightweight, low-thrust ballistic hopping and coarse attitude control. Each deployed AMIGO will hop across the surface of the asteroid multiple times.
Motion Planning on an Asteroid Surface with Irregular Gravity Fields
Feb 06, 2019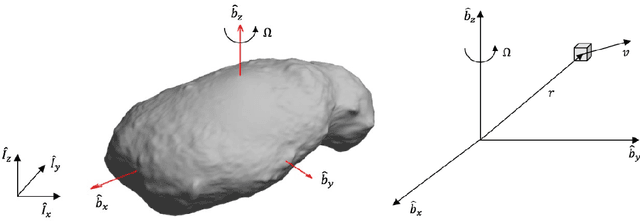
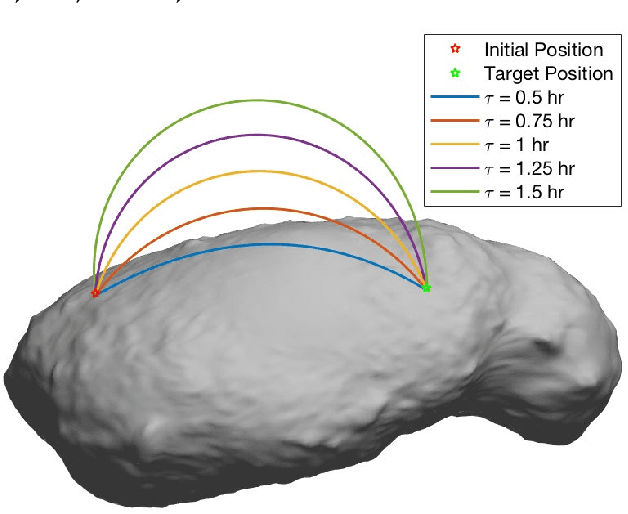
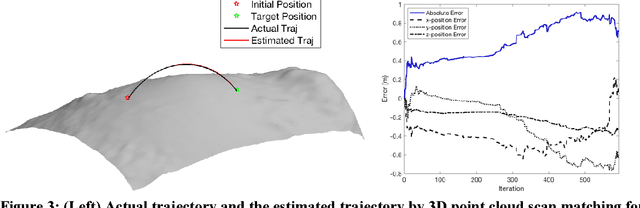
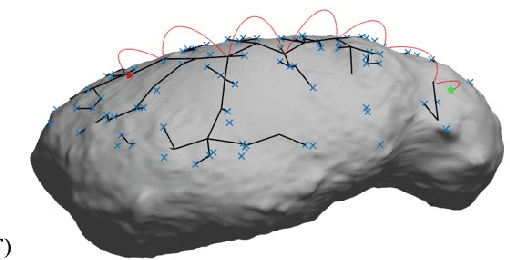
There are thousands of asteroids in near-Earth space and millions in the Main Belt. They are diverse in physical properties and composition and are time capsules of the early solar system. This makes them strategic locations for planetary science, resource mining, planetary defense/security and as inter-planetary depots and communication relays. However, asteroids are a chal-lenging target for surface exploration due it its low but highly nonlinear gravity field. In such conditions, mobility through ballistic hopping possess multiple advantages over conventional mobility solutions and as such hop-ping robots have emerged as a promising platform for future exploration of asteroids and comets. They can traverse large distances over rough terrain with the expenditure of minimum energy. In this paper we present ballistic hopping dynamics and its motion planning on an asteroid surface with highly nonlinear gravity fields. We do it by solving Lambert's orbital boundary val-ue problem in irregular gravity fields by a shooting method to find the initial velocity required to intercept a target. We then present methods to localize the hopping robot using pose estimation by successive scan matching with a 3D laser scanner. Using the above results, we provide methods for motion planning on the asteroid surface over long distances. The robot will require to perform multiple hops to reach a desired goal from its initial position while avoiding obstacles. The study is then be extended to find optimal tra-jectories to reach a desired goal by visiting multiple waypoints.
Laser Communication and Coordination Control of Spacecraft Swarms
Jan 25, 2019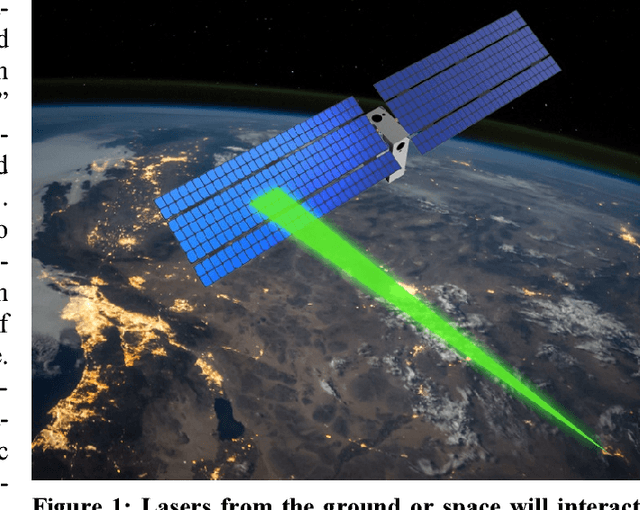
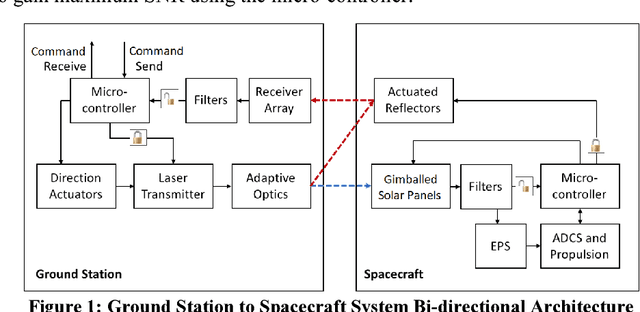
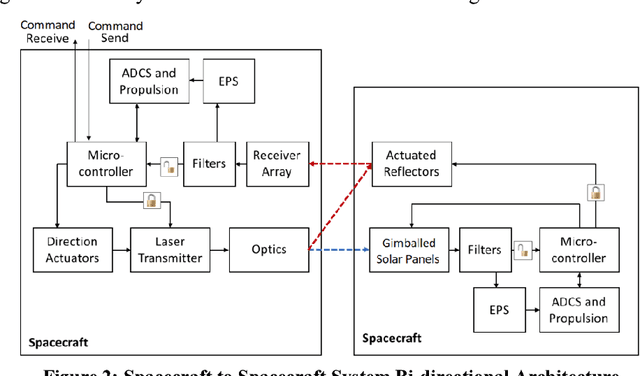
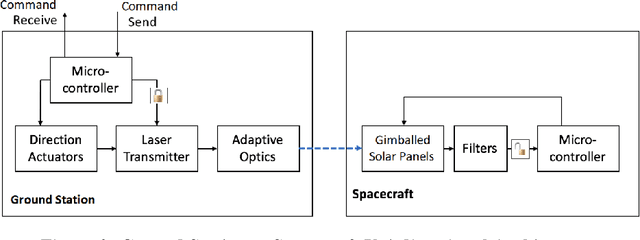
Swarms of small spacecraft offer whole new capabilities in Earth observation, global positioning and communications compared to a large monolithic spacecraft. These small spacecrafts can provide bigger apertures that increase gain in communication antennas, increase area coverage or effective resolution of distributed cameras and enable persistent observation of ground or space targets. However, there remain important challenges in operating large number of spacecrafts at once. Current methods would require a large number of ground operators monitor and actively control these spacecrafts which poses challenges in terms of coordination and control which prevents the technology from scaled up in cost-effective manner. Technologies are required to enable one ground operator to manage tens if not hundreds of spacecrafts. We propose to utilize laser beams directed from the ground or from a command and control spacecraft to organize and manage a large swarm. Each satellite in the swarm will have a customized "smart skin" con-taining solar panels, power and control circuitry and an embedded secondary propulsion unit. A secondary propulsion unit may include electrospray pro-pulsion, solar radiation pressure-based system, photonic laser thrusters and Lorentz force thrusters. Solar panels typically occupy the largest surface area on an earth orbiting satellite. A laser beam from another spacecraft or from the ground would interact with solar panels of the spacecraft swarm. The laser beam would be used to select a 'leader' amongst a group of spacecrafts, set parameters for formation-flight, including separation distance, local if-then rules and coordinated changes in attitude and position.
Coordination and Control of Multiple Climbing Robots in Transport of Heavy Loads through Extreme Terrain
Dec 30, 2018



The discovery of ice deposits in the permanently shadowed craters of the lunar North and South Pole Moon presents an important opportunity for In-Situ Resource Utilization. These ice deposits maybe the source for sustaining a lunar base or for enabling an interplanetary refueling station. These ice deposits also preserve a unique record of the geology and environment of their hosts, both in terms of impact history and the supply of volatile compounds, and so are of immense scientific interest. To date, these ice deposits have been studied indirectly and by remote active radar, but they need to be analyzed in-situ by robotic systems that can study the depths of the deposits, their purity and composition. However, these shadowed craters never see sunlight and are one of the coldest places in the solar system. NASA JPL proposed use of solar reflectors mounted on crater rims to project sunlight into the crater depths for use by ground robots. The solar reflectors would heat the crater base and vehicles positioned at the base sufficiently to survive the cold-temperatures. Our approach analyzes part of the logistics of the approach, with teams of robots climbing up and down to the crater to access the ice deposits. The mission will require robots to climb down extreme environments and carry large structures, including instruments and communication devices.
On-Orbit Smart Camera System to Observe Illuminated and Unilluminated Space Objects
Sep 06, 2018
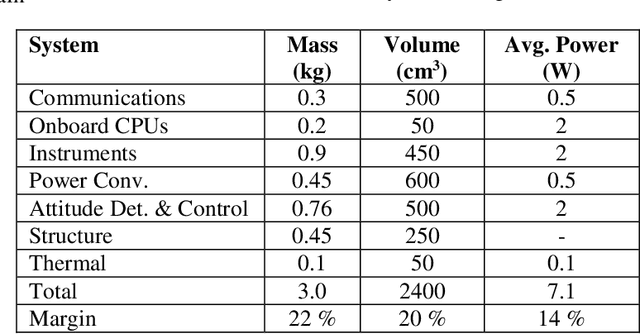

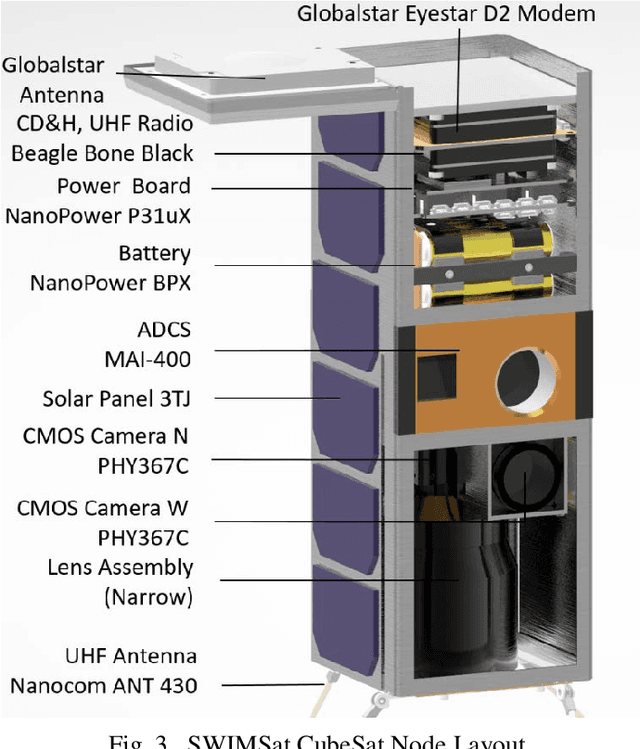
The wide availability of Commercial Off-The-Shelf (COTS) electronics that can withstand Low Earth Orbit conditions has opened avenue for wide deployment of CubeSats and small-satellites. CubeSats thanks to their low developmental and launch costs offer new opportunities for rapidly demonstrating on-orbit surveillance capabilities. In our earlier work, we proposed development of SWIMSat (Space based Wide-angle Imaging of Meteors) a 3U CubeSat demonstrator that is designed to observe illuminated objects entering the Earth's atmosphere. The spacecraft would operate autonomously using a smart camera with vision algorithms to detect, track and report of objects. Several CubeSats can track an object in a coordinated fashion to pinpoint an object's trajectory. An extension of this smart camera capability is to track unilluminated objects utilizing capabilities we have been developing to track and navigate to Near Earth Objects (NEOs). This extension enables detecting and tracking objects that can't readily be detected by humans. The system maintains a dense star map of the night sky and performs round the clock observations. Standard optical flow algorithms are used to obtain trajectories of all moving objects in the camera field of view. Through a process of elimination, certain stars maybe occluded by a transiting unilluminated object which is then used to first detect and obtain a trajectory of the object. Using multiple cameras observing the event from different points of view, it may be possible then to triangulate the position of the object in space and obtain its orbital trajectory. In this work, the performance of our space object detection algorithm coupled with a spacecraft guidance, navigation, and control system is demonstrated.