 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning on an Asteroid Surface with Irregular Gravity Fields
Paper and Code
Feb 06, 2019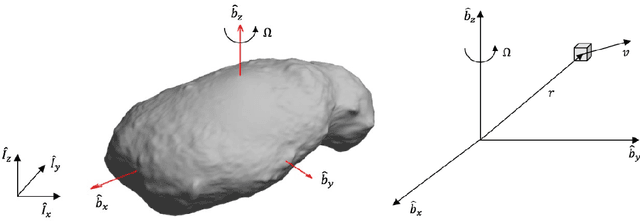
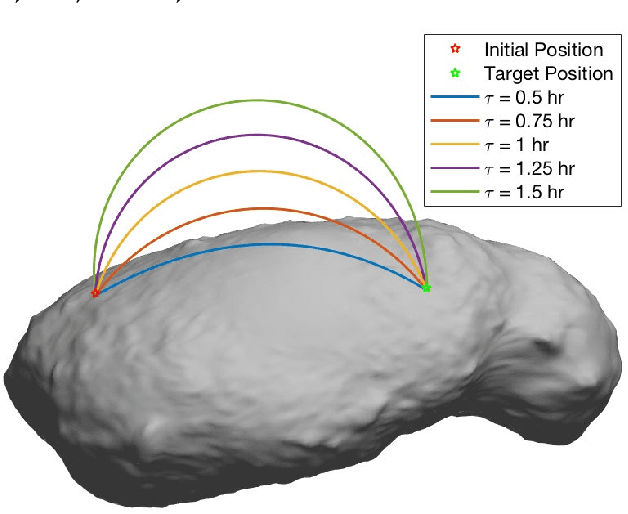
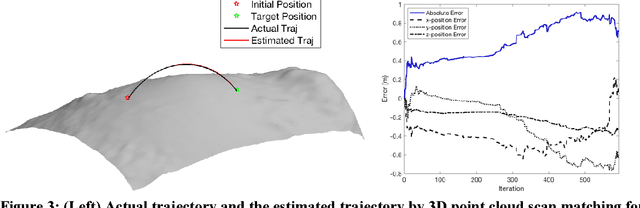
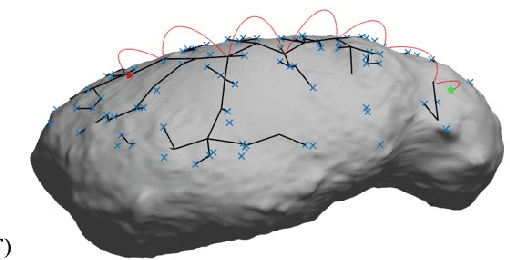
There are thousands of asteroids in near-Earth space and millions in the Main Belt. They are diverse in physical properties and composition and are time capsules of the early solar system. This makes them strategic locations for planetary science, resource mining, planetary defense/security and as inter-planetary depots and communication relays. However, asteroids are a chal-lenging target for surface exploration due it its low but highly nonlinear gravity field. In such conditions, mobility through ballistic hopping possess multiple advantages over conventional mobility solutions and as such hop-ping robots have emerged as a promising platform for future exploration of asteroids and comets. They can traverse large distances over rough terrain with the expenditure of minimum energy. In this paper we present ballistic hopping dynamics and its motion planning on an asteroid surface with highly nonlinear gravity fields. We do it by solving Lambert's orbital boundary val-ue problem in irregular gravity fields by a shooting method to find the initial velocity required to intercept a target. We then present methods to localize the hopping robot using pose estimation by successive scan matching with a 3D laser scanner. Using the above results, we provide methods for motion planning on the asteroid surface over long distances. The robot will require to perform multiple hops to reach a desired goal from its initial position while avoiding obstacles. The study is then be extended to find optimal tra-jectories to reach a desired goal by visiting multiple waypoints.