 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNetwork of Nano-Landers for In-Situ Characterization of Asteroid Impact Studies
Sep 09, 2017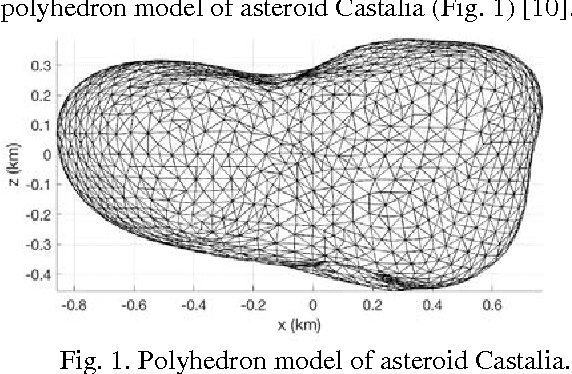
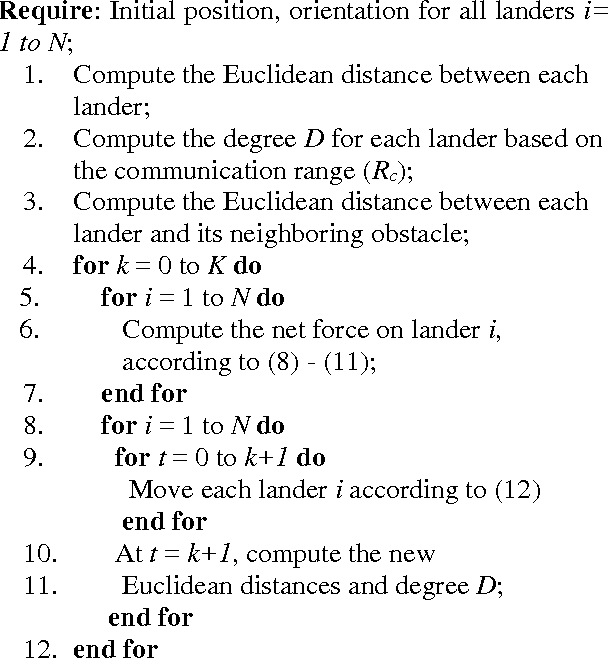
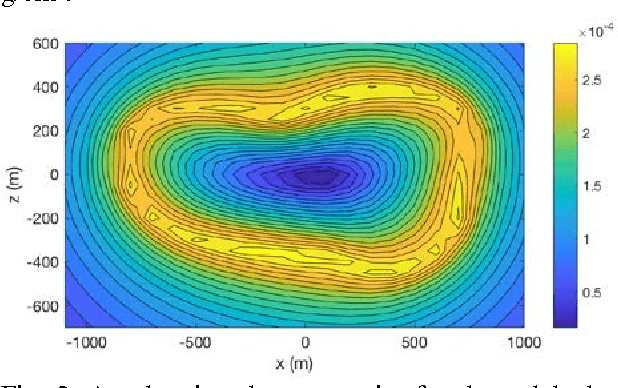

Exploration of asteroids and comets can give insight into the origins of the solar system and can be instrumental in planetary defence and in-situ resource utilization (ISRU). Asteroids, due to their low gravity are a challenging target for surface exploration. Current missions envision performing touch-and-go operations over an asteroid surface. In this work, we analyse the feasibility of sending scores of nano-landers, each 1 kg in mass and volume of 1U, or 1000 cm3. These landers would hop, roll and fly over the asteroid surface. The landers would include science instruments such as stereo cameras, hand-lens imagers and spectrometers to characterize rock composition. A network of nano-landers situated on the surface of an asteroid can provide unique and very detailed measurements of a spacecraft impacting onto an asteroid surface. A full-scale, artificial impact experiment onto an asteroid can help characterize its composition and geology and help in the development of asteroid deflection techniques intended for planetary defence. Scores of nano-landers could provide multiple complementary views of the impact, resultant seismic activity and trajectory of the ejecta. The nano-landers can analyse the pristine, unearthed regolith shielded from effects of UV and cosmic rays and that may be millions of years old. Our approach to formulating this mission concepts utilizes automated machine learning techniques in the planning and design of space systems. We use a form of Darwinian selection to select and identify suitable number of nano-landers, the on-board instruments and control system to explore and navigate the asteroid environment. Scenarios are generated in simulation and evaluated against quantifiable mission goals such as area explored on the asteroid and amount of data recorded from the impact event.
Flying, Hopping Pit-Bots for Cave and Lava Tube Exploration on the Moon and Mars
Jan 26, 2017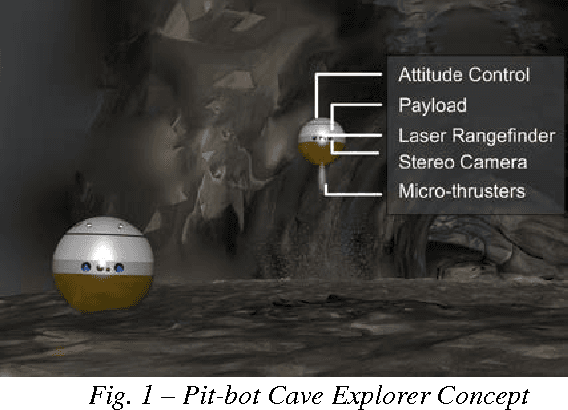
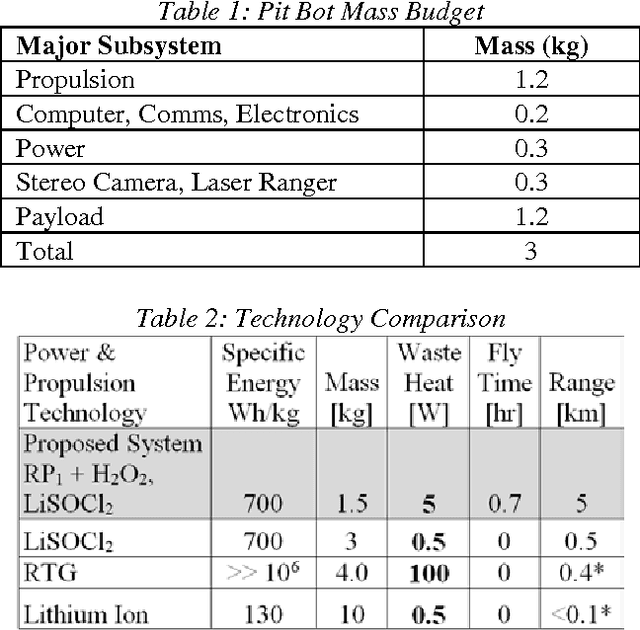
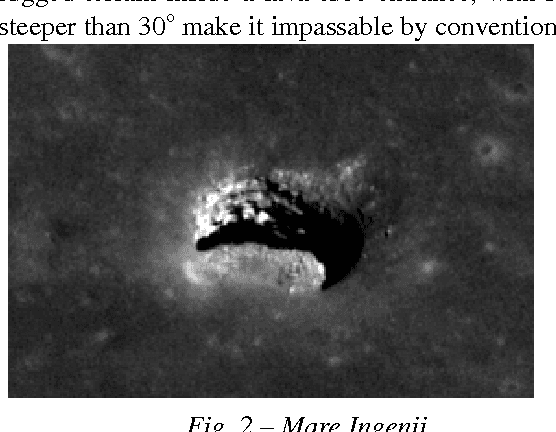
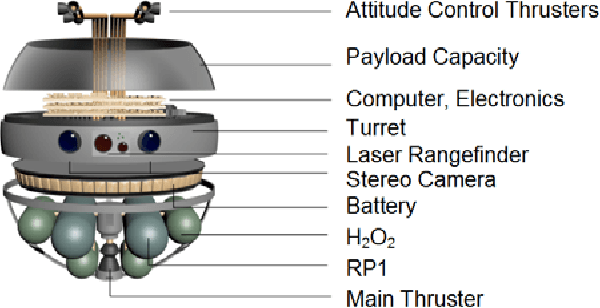
Wheeled ground robots are limited from exploring extreme environments such as caves, lava tubes and skylights. Small robots that utilize unconventional mobility through hopping, flying and rolling can overcome many roughness limitations and thus extend exploration sites of interest on Moon and Mars. In this paper we introduce a network of 3 kg, 0.30 m diameter ball robots (pit-bots) that can fly, hop and roll using an onboard miniature propulsion system. These pit-bots can be deployed from a lander or large rover. Each robot is equipped with a smartphone sized computer, stereo camera and laser rangefinder to per-form navigation and mapping. The ball robot can carry a payload of 1 kg or perform sample return. Our studies show a range of 5 km and 0.7 hours flight time on the Moon.
Optimized Bucket Wheel Design for Asteroid Excavation
Jan 26, 2017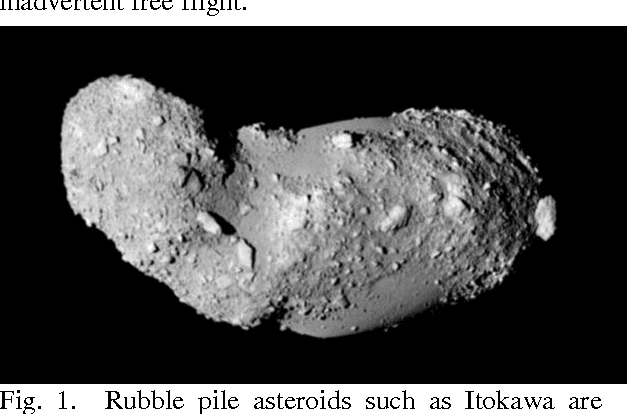
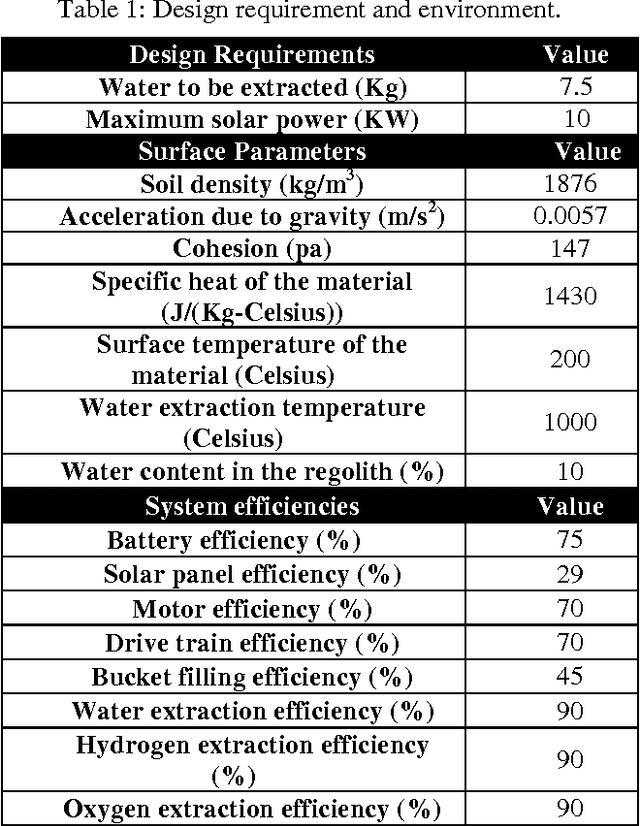
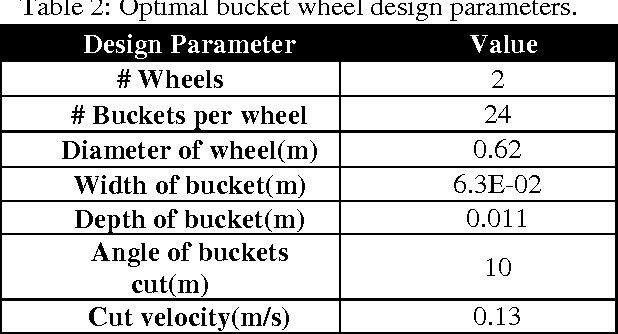
Current spacecraft need to launch with all of their required fuel for travel. This limits the system performance, payload capacity, and mission flexibility. One compelling alternative is to perform In-Situ Resource Utilization (ISRU) by extracting fuel from small bodies in local space such as asteroids or small satellites. Compared to the Moon or Mars, the microgravity on an asteroid demands a fraction of the energy for digging and accessing hydrated regolith just below the surface. Previous asteroid excavation efforts have focused on discrete capture events (an extension of sampling technology) or whole-asteroid capture and processing. This paper proposes an optimized bucket wheel design for surface excavation of an asteroid or small-body. Asteroid regolith is excavated and water extracted for use as rocket propellant. Our initial study focuses on system design, bucket wheel mechanisms, and capture dynamics applied to ponded materials known to exist on asteroids like Itokawa and Eros and small satellites like Phobos and Deimos. For initial evaluation of material-spacecraft dynamics and mechanics, we assume lunar-like regolith for bulk density, particle size and cohesion. We shall present our estimates for the energy balance of excavation and processing versus fuel gained. Conventional electrolysis of water is used to produce hydrogen and oxygen. It is compared with steam for propulsion and both show significant delta-v. We show that a return trip from Deimos to Earth is possible for a 12 kg craft using ISRU processed fuel.
Autonomous Multirobot Excavation for Lunar Applications
Jan 06, 2017


In this paper, a control approach called Artificial Neural Tissue (ANT) is applied to multirobot excavation for lunar base preparation tasks including clearing landing pads and burying of habitat modules. We show for the first time, a team of autonomous robots excavating a terrain to match a given 3D blueprint. Constructing mounds around landing pads will provide physical shielding from debris during launch/landing. Burying a human habitat modules under 0.5 m of lunar regolith is expected to provide both radiation shielding and maintain temperatures of -25 $^{o}$C. This minimizes base life-support complexity and reduces launch mass. ANT is compelling for a lunar mission because it doesn't require a team of astronauts for excavation and it requires minimal supervision. The robot teams are shown to autonomously interpret blueprints, excavate and prepare sites for a lunar base. Because little pre-programmed knowledge is provided, the controllers discover creative techniques. ANT evolves techniques such as slot-dozing that would otherwise require excavation experts. This is critical in making an excavation mission feasible when it is prohibitively expensive to send astronauts. The controllers evolve elaborate negotiation behaviors to work in close quarters. These and other techniques such as concurrent evolution of the controller and team size are shown to tackle problem of antagonism, when too many robots interfere reducing the overall efficiency or worse, resulting in gridlock. While many challenges remain with this technology our work shows a compelling pathway for field testing this approach.