 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlying, Hopping Pit-Bots for Cave and Lava Tube Exploration on the Moon and Mars
Jan 26, 2017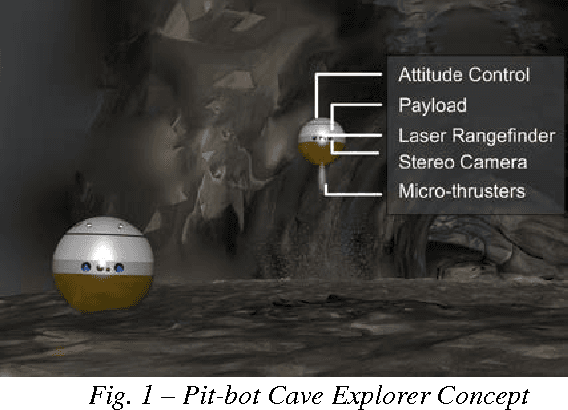
Wheeled ground robots are limited from exploring extreme environments such as caves, lava tubes and skylights. Small robots that utilize unconventional mobility through hopping, flying and rolling can overcome many roughness limitations and thus extend exploration sites of interest on Moon and Mars. In this paper we introduce a network of 3 kg, 0.30 m diameter ball robots (pit-bots) that can fly, hop and roll using an onboard miniature propulsion system. These pit-bots can be deployed from a lander or large rover. Each robot is equipped with a smartphone sized computer, stereo camera and laser rangefinder to per-form navigation and mapping. The ball robot can carry a payload of 1 kg or perform sample return. Our studies show a range of 5 km and 0.7 hours flight time on the Moon.