 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrid-based Localization Stack for Inspection Drones towards Automation of Large Scale Warehouse Systems
Jun 04, 2019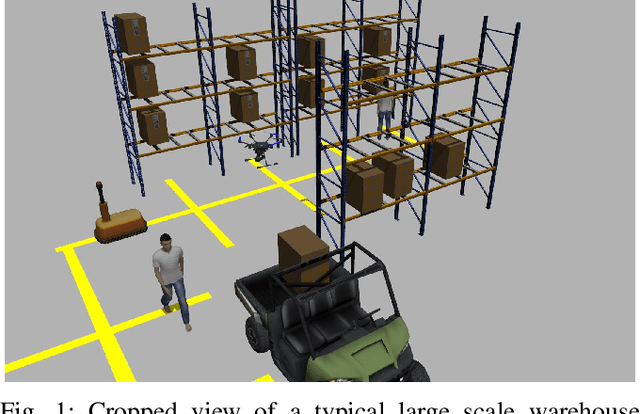
SLAM based techniques are often adopted for solving the navigation problem for the drones in GPS denied environment. Despite the widespread success of these approaches, they have not yet been fully exploited for automation in a warehouse system due to expensive sensors and setup requirements. This paper focuses on the use of low-cost monocular camera-equipped drones for performing warehouse management tasks like inventory scanning and position update. The methods introduced are at par with the existing state of warehouse environment present today, that is, the existence of a grid network for the ground vehicles, hence eliminating any additional infrastructure requirement for drone deployment. As we lack scale information, that in itself forbids us to use any 3D techniques, we focus more towards optimizing standard image processing algorithms like the thick line detection and further developing it into a fast and robust grid localization framework. In this paper, we show different line detection algorithms, their significance in grid localization and their limitations. We further extend our proposed implementation towards a real-time navigation stack for an actual warehouse inspection case scenario. Our line detection method using skeletonization and centroid strategy works considerably even with varying light conditions, line thicknesses, colors, orientations, and partial occlusions. A simple yet effective Kalman Filter has been used for smoothening the {\rho} and {\theta} outputs of the two different line detection methods for better drone control while grid following. A generic strategy that handles the navigation of the drone on a grid for completion of the allotted task is also developed. Based on the simulation and real-life experiments, the final developments on the drone localization and navigation in a structured environment are discussed.