 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoverHunter: Cover Song Identification with Refined Attention and Alignments
Jun 15, 2023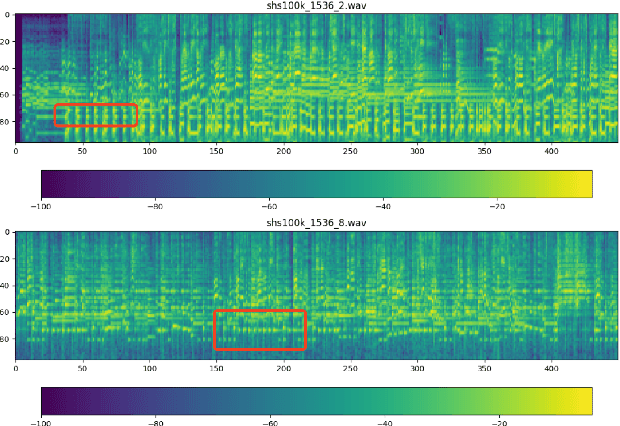
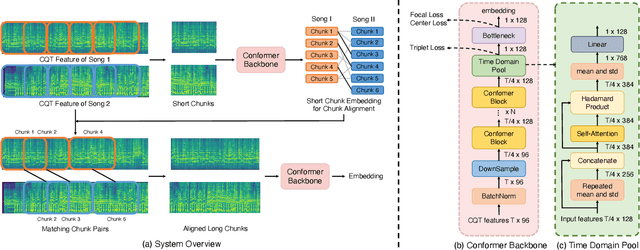
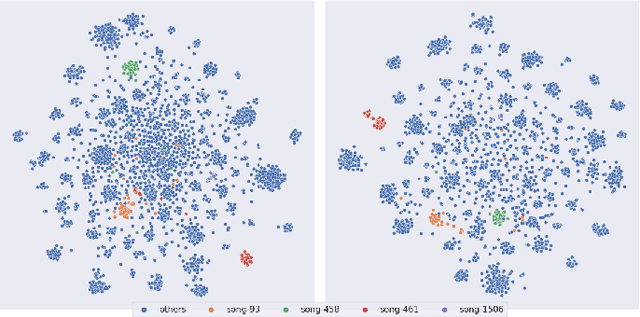
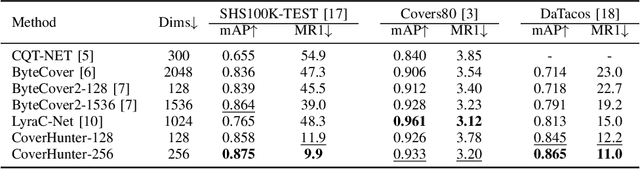
Abstract: Cover song identification (CSI) focuses on finding the same music with different versions in reference anchors given a query track. In this paper, we propose a novel system named CoverHunter that overcomes the shortcomings of existing detection schemes by exploring richer features with refined attention and alignments. CoverHunter contains three key modules: 1) A convolution-augmented transformer (i.e., Conformer) structure that captures both local and global feature interactions in contrast to previous methods mainly relying on convolutional neural networks; 2) An attention-based time pooling module that further exploits the attention in the time dimension; 3) A novel coarse-to-fine training scheme that first trains a network to roughly align the song chunks and then refines the network by training on the aligned chunks. At the same time, we also summarize some important training tricks used in our system that help achieve better results. Experiments on several standard CSI datasets show that our method significantly improves over state-of-the-art methods with an embedding size of 128 (2.3% on SHS100K-TEST and 17.7% on DaTacos).
Co-Evolution of Multi-Robot Controllers and Task Cues for Off-World Open Pit Mining
Sep 19, 2020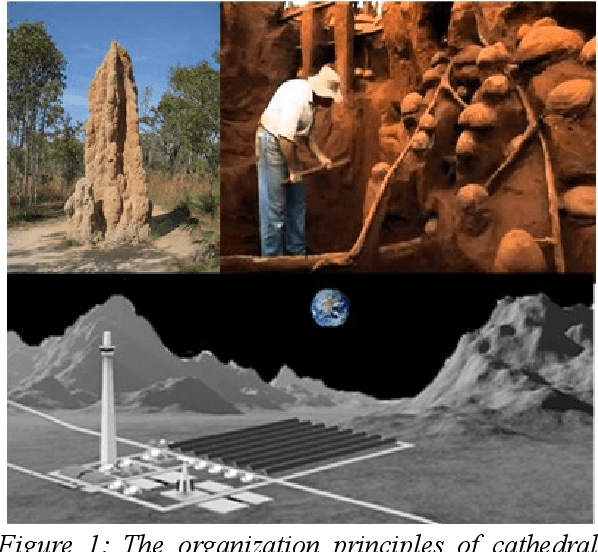
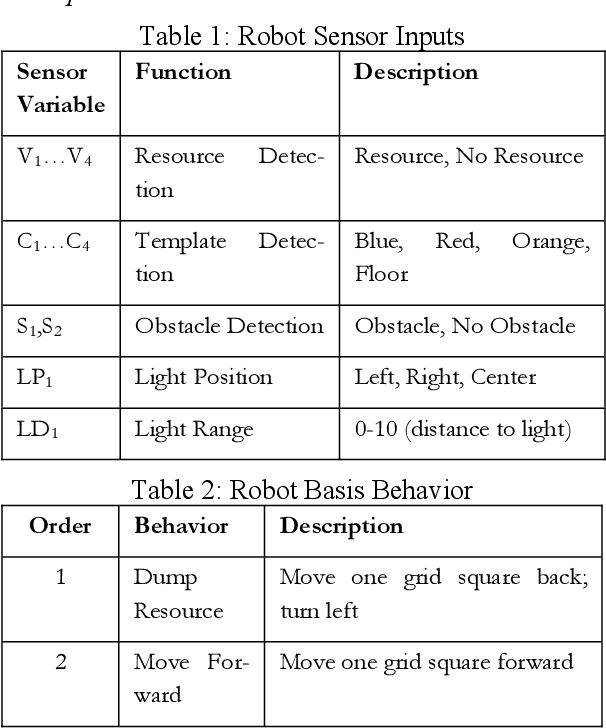
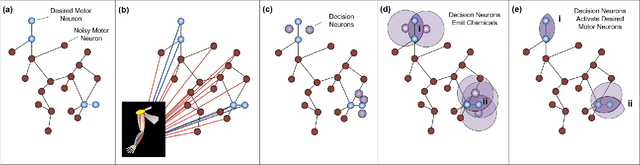
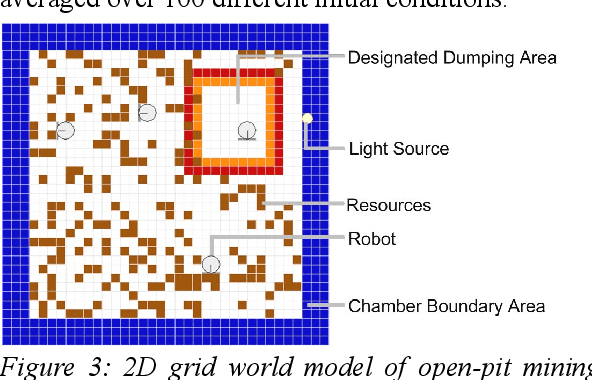
Robots are ideal for open-pit mining on the Moon as its a dull, dirty, and dangerous task. The challenge is to scale up productivity with an ever-increasing number of robots. This paper presents a novel method for developing scalable controllers for use in multi-robot excavation and site-preparation scenarios. The controller starts with a blank slate and does not require human-authored operations scripts nor detailed modeling of the kinematics and dynamics of the excavator. The 'Artificial Neural Tissue' (ANT) architecture is used as a control system for autonomous robot teams to perform resource gathering. This control architecture combines a variable-topology neural-network structure with a coarse-coding strategy that permits specialized areas to develop in the tissue. Our work in this field shows that fleets of autonomous decentralized robots have an optimal operating density. Too few robots result in insufficient labor, while too many robots cause antagonism, where the robots undo each other's work and are stuck in gridlock. In this paper, we explore the use of templates and task cues to improve group performance further and minimize antagonism. Our results show light beacons and task cues are effective in sparking new and innovative solutions at improving robot performance when placed under stressful situations such as severe time-constraint.
Table Search Using a Deep Contextualized Language Model
May 26, 2020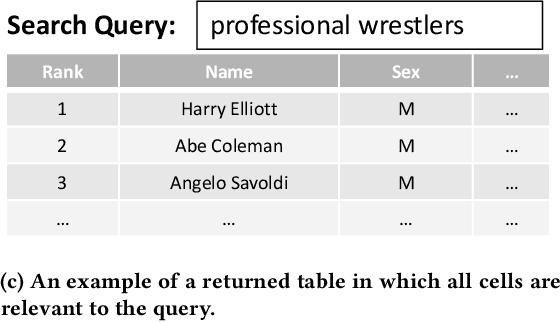
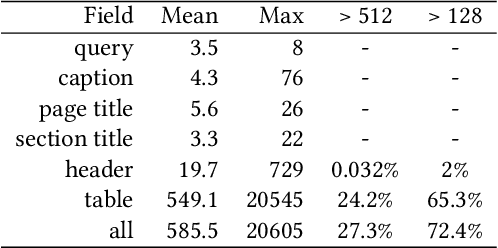
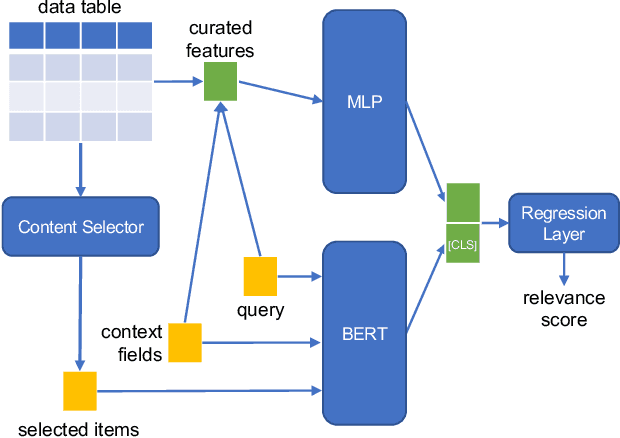

Pretrained contextualized language models such as BERT have achieved impressive results on various natural language processing benchmarks. Benefiting from multiple pretraining tasks and large scale training corpora, pretrained models can capture complex syntactic word relations. In this paper, we use the deep contextualized language model BERT for the task of ad hoc table retrieval. We investigate how to encode table content considering the table structure and input length limit of BERT. We also propose an approach that incorporates features from prior literature on table retrieval and jointly trains them with BERT. In experiments on public datasets, we show that our best approach can outperform the previous state-of-the-art method and BERT baselines with a large margin under different evaluation metrics.
The Design of a Space-based Observation and Tracking System for Interstellar Objects
Feb 03, 2020
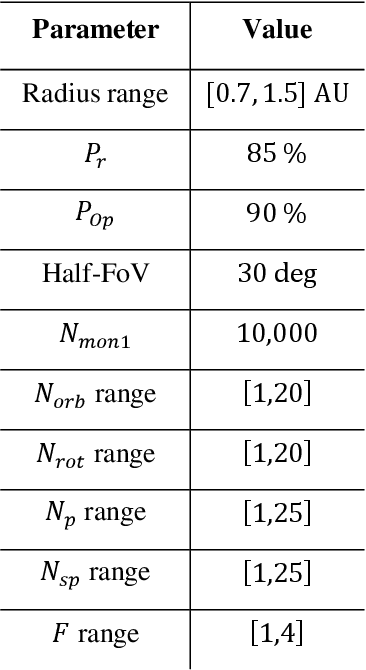


The recent observation of interstellar objects, 1I/Oumuamua and 2I/Borisov cross the solar system opened new opportunities for planetary science and planetary defense. As the first confirmed objects originating outside of the solar system, there are myriads of origin questions to explore and discuss, including where they came from, how did they get here and what are they composed of. Besides, there is a need to be cognizant especially if such interstellar objects pass by the Earth of potential dangers of impact. Specifically, in the case of Oumuamua, which was detected after its perihelion, passed by the Earth at around 0.2 AU, with an estimated excess speed of 60 km/s relative to the Earth. Without enough forewarning time, a collision with such high-speed objects can pose a catastrophic danger to all life Earth. Such challenges underscore the importance of detection and exploration systems to study these interstellar visitors. The detection system can include a spacecraft constellation with zenith-pointing telescope spacecraft. After an event is detected, a spacecraft swarm can be deployed from Earth to flyby past the visitor. The flyby can then be designed to perform a proximity operation of interest. This work aims to develop algorithms to design these swarm missions through the IDEAS (Integrated Design Engineering & Automation of Swarms) architecture. Specifically, we develop automated algorithms to design an Earth-based detection constellation and a spacecraft swarm that generates detailed surface maps of the visitor during the rendezvous, along with their heliocentric cruise trajectories.