 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Spring Propelled Extreme Environment Robot for Off-World Cave Exploration
Mar 19, 2019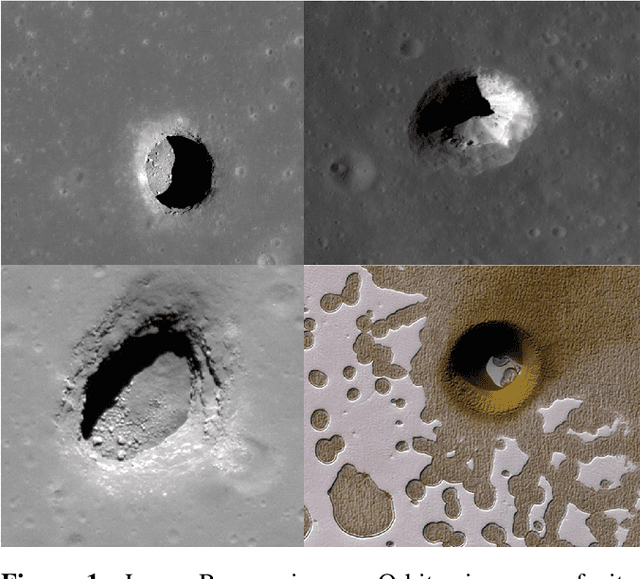

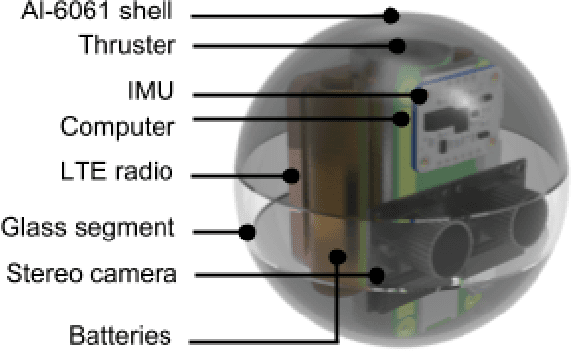
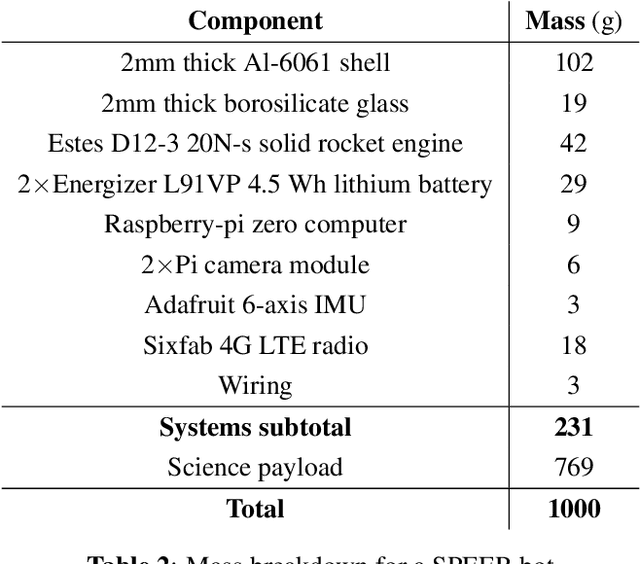
Pits on the Moon and Mars are intriguing geological formations that have yet to be explored. These geological formations can provide protection from harsh diurnal temperature variations, ionizing radiation, and meteorite impacts. Some have proposed that these underground formations are well-suited as human outposts. Some theorize that the Martian pits may harbor remnants of past life. Unfortunately, these geo-logical formations have been off-limits to conventional wheeled rovers and lander systems due to their collapsed ceiling or 'skylight' entrances. In this paper, a new low-cost method to explore these pits is presented using the Spring Propelled Extreme Environment Robot (SPEER). The SPEER consists of a launch system that flings disposable spherical microbots through skylights into the pits. The microbots are low-cost and composed of aluminium Al-6061 disposable spheres with an array of adapted COTS sensors and a solid rocket motor for soft landing.By moving most control authority to the launcher, the microbots become very simple, lightweight, and low-cost. We present a preliminary design of the microbots that can be built today using commercial components for under 500 USD. The microbots have a total mass of 1 kg, with more than 750 g available for a science instrument. In this paper, we present the design, dynamics and control, and operation of these microbots. This is followed by initial feasibility studies of the SPEER system by simulating exploration of a known Lunar pit in Mare Tranquillitatis.