 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
How Strong a Kick Should be to Topple Northeastern's Tumbling Robot?
Nov 25, 2023



Rough terrain locomotion has remained one of the most challenging mobility questions. In 2022, NASA's Innovative Advanced Concepts (NIAC) Program invited US academic institutions to participate NASA's Breakthrough, Innovative \& Game-changing (BIG) Idea competition by proposing novel mobility systems that can negotiate extremely rough terrain, lunar bumpy craters. In this competition, Northeastern University won NASA's top Artemis Award award by proposing an articulated robot tumbler called COBRA (Crater Observing Bio-inspired Rolling Articulator). This report briefly explains the underlying principles that made COBRA successful in competing with other concepts ranging from cable-driven to multi-legged designs from six other participating US institutions.
Demonstrating Autonomous 3D Path Planning on a Novel Scalable UGV-UAV Morphing Robot
Aug 01, 2023



Some animals exhibit multi-modal locomotion capability to traverse a wide range of terrains and environments, such as amphibians that can swim and walk or birds that can fly and walk. This capability is extremely beneficial for expanding the animal's habitat range and they can choose the most energy efficient mode of locomotion in a given environment. The robotic biomimicry of this multi-modal locomotion capability can be very challenging but offer the same advantages. However, the expanded range of locomotion also increases the complexity of performing localization and path planning. In this work, we present our morphing multi-modal robot, which is capable of ground and aerial locomotion, and the implementation of readily available SLAM and path planning solutions to navigate a complex indoor environment.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021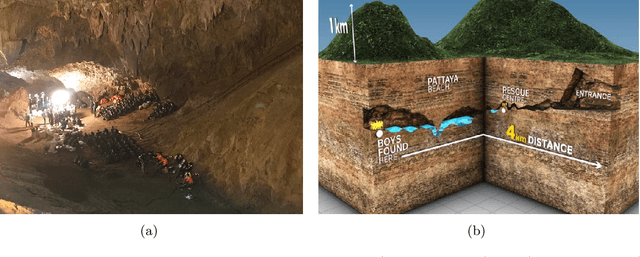
This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
The Shapeshifter: a Morphing, Multi-Agent,Multi-Modal Robotic Platform for the Exploration of Titan
Mar 16, 2020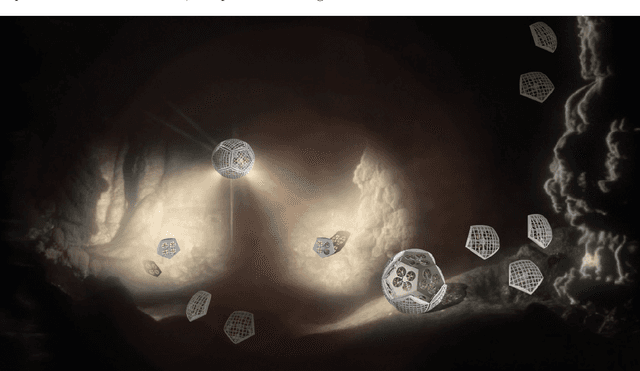
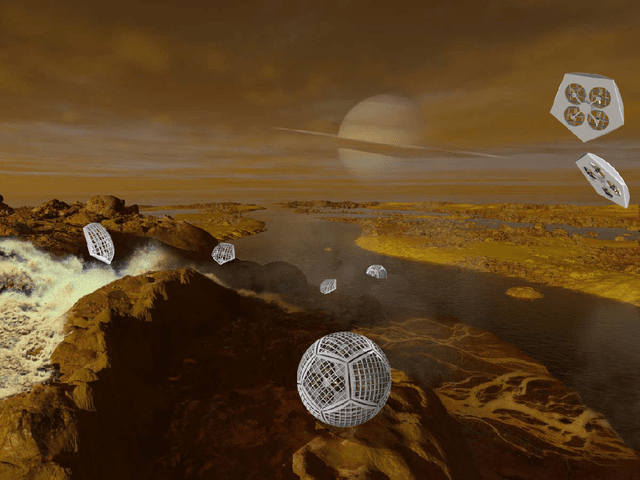
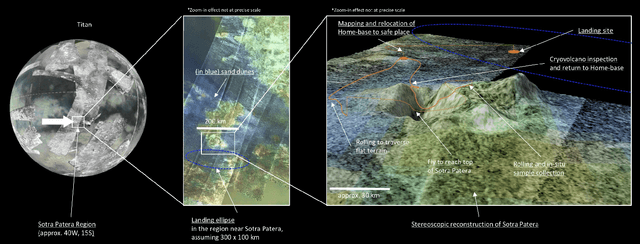
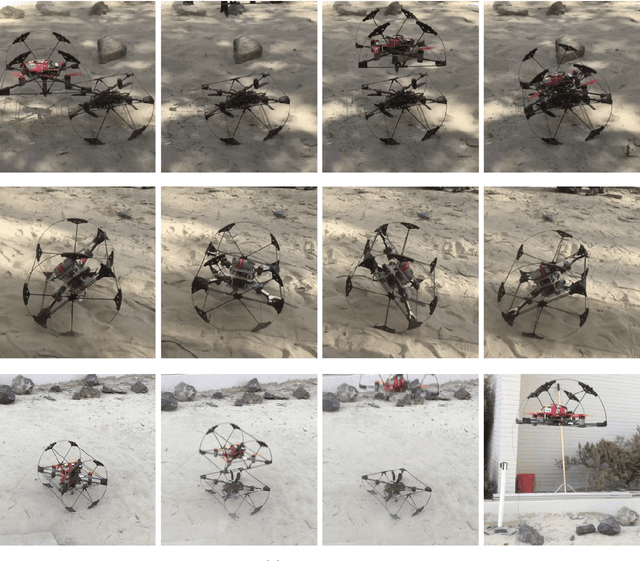
In this report for the Nasa NIAC Phase I study, we present a mission architecture and a robotic platform, the Shapeshifter, that allow multi-domain and redundant mobility on Saturn's moon Titan, and potentially other bodies with atmospheres. The Shapeshifter is a collection of simple and affordable robotic units, called Cobots, comparable to personal palm-size quadcopters. By attaching and detaching with each other, multiple Cobots can shape-shift into novel structures, capable of (a) rolling on the surface, to increase the traverse range, (b) flying in a flight array formation, and (c) swimming on or under liquid. A ground station complements the robotic platform, hosting science instrumentation and providing power to recharge the batteries of the Cobots. Our Phase I study had the objective of providing an initial assessment of the feasibility of the proposed robotic platform architecture, and in particular (a) to characterize the expected science return of a mission to the Sotra-Patera region on Titan; (b) to verify the mechanical and algorithmic feasibility of building a multi-agent platform capable of flying, docking, rolling and un-docking; (c) to evaluate the increased range and efficiency of rolling on Titan w.r.t to flying; (d) to define a case-study of a mission for the exploration of the cryovolcano Sotra-Patera on Titan, whose expected variety of geological features challenges conventional mobility platforms.