 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePoleStack: Robust Pole Estimation of Irregular Objects from Silhouette Stacking
Feb 05, 2025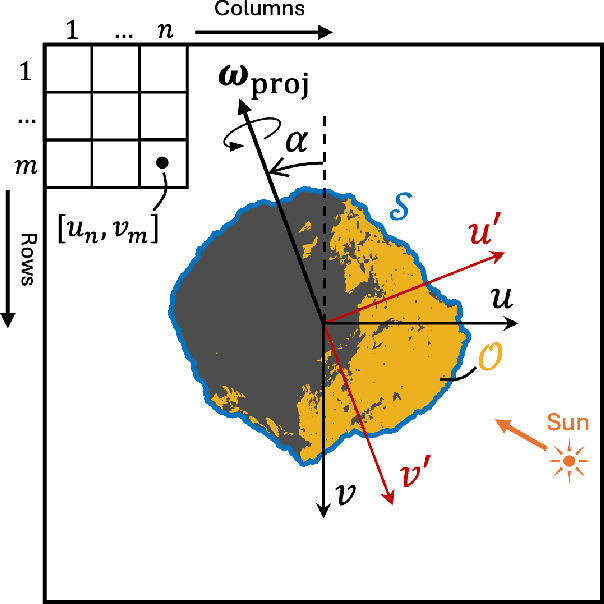
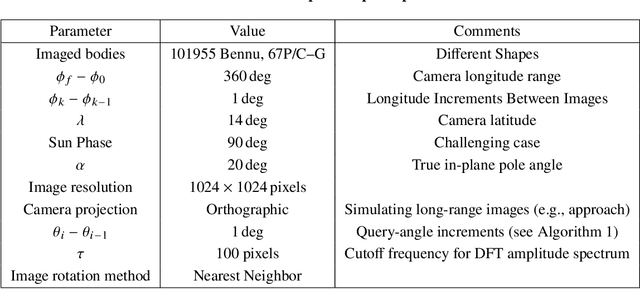
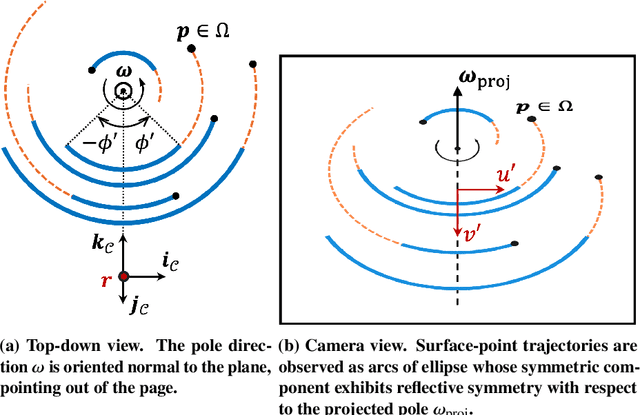
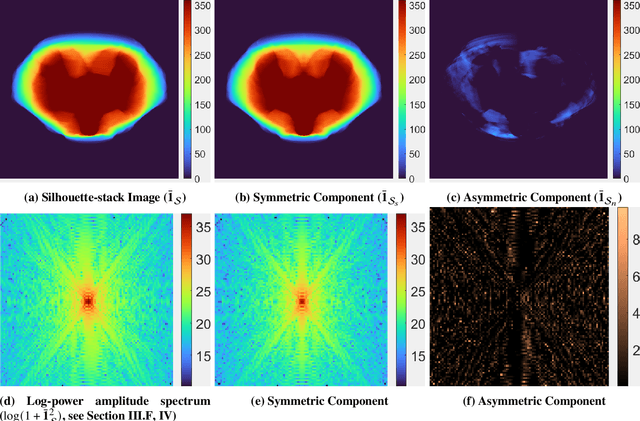
We present an algorithm to estimate the rotation pole of a principal-axis rotator using silhouette images collected from multiple camera poses. First, a set of images is stacked to form a single silhouette-stack image, where the object's rotation introduces reflective symmetry about the imaged pole direction. We estimate this projected-pole direction by identifying maximum symmetry in the silhouette stack. To handle unknown center-of-mass image location, we apply the Discrete Fourier Transform to produce the silhouette-stack amplitude spectrum, achieving translation invariance and increased robustness to noise. Second, the 3D pole orientation is estimated by combining two or more projected-pole measurements collected from different camera orientations. We demonstrate degree-level pole estimation accuracy using low-resolution imagery, showing robustness to severe surface shadowing and centroid-based image-registration errors. The proposed approach could be suitable for pole estimation during both the approach phase toward a target object and while hovering.
Modeling Considerations for Developing Deep Space Autonomous Spacecraft and Simulators
Jan 21, 2024


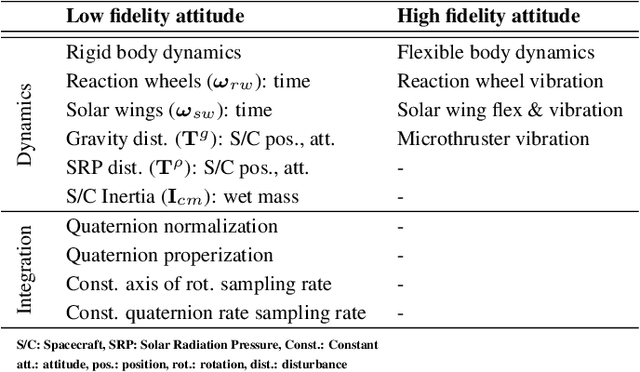
To extend the limited scope of autonomy used in prior missions for operation in distant and complex environments, there is a need to further develop and mature autonomy that jointly reasons over multiple subsystems, which we term system-level autonomy. System-level autonomy establishes situational awareness that resolves conflicting information across subsystems, which may necessitate the refinement and interconnection of the underlying spacecraft and environment onboard models. However, with a limited understanding of the assumptions and tradeoffs of modeling to arbitrary extents, designing onboard models to support system-level capabilities presents a significant challenge. In this paper, we provide a detailed analysis of the increasing levels of model fidelity for several key spacecraft subsystems, with the goal of informing future spacecraft functional- and system-level autonomy algorithms and the physics-based simulators on which they are validated. We do not argue for the adoption of a particular fidelity class of models but, instead, highlight the potential tradeoffs and opportunities associated with the use of models for onboard autonomy and in physics-based simulators at various fidelity levels. We ground our analysis in the context of deep space exploration of small bodies, an emerging frontier for autonomous spacecraft operation in space, where the choice of models employed onboard the spacecraft may determine mission success. We conduct our experiments in the Multi-Spacecraft Concept and Autonomy Tool (MuSCAT), a software suite for developing spacecraft autonomy algorithms.
The Shapeshifter: a Morphing, Multi-Agent,Multi-Modal Robotic Platform for the Exploration of Titan
Mar 16, 2020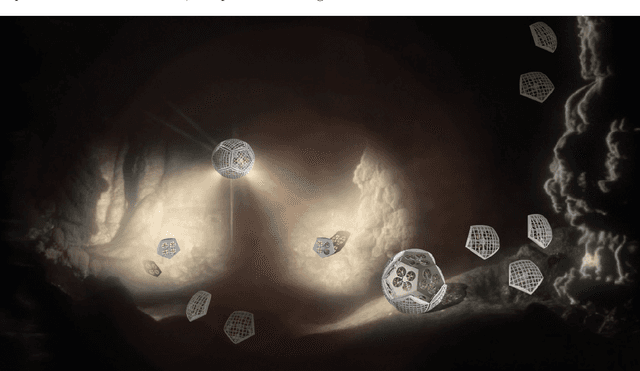
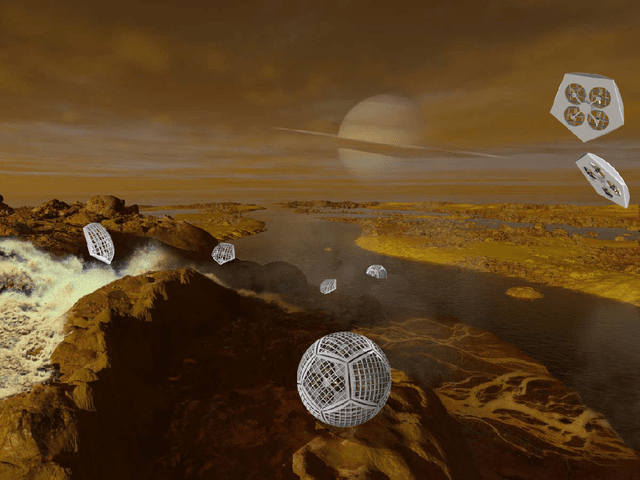
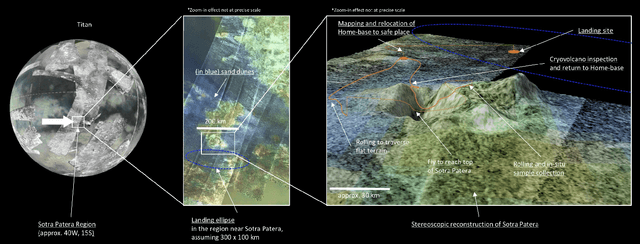
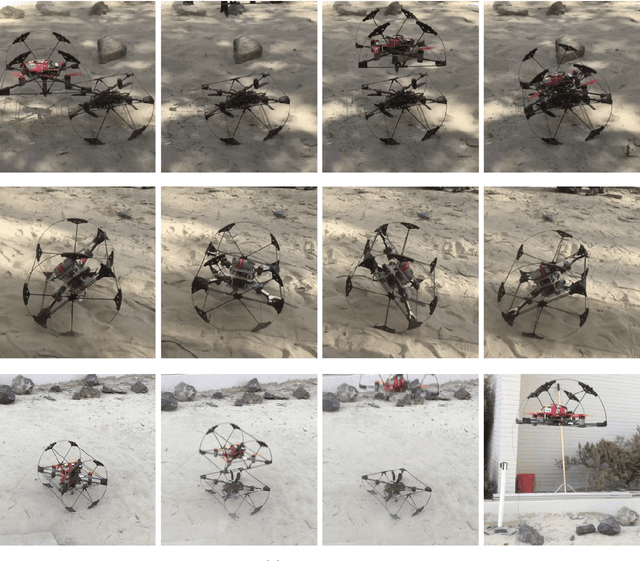
In this report for the Nasa NIAC Phase I study, we present a mission architecture and a robotic platform, the Shapeshifter, that allow multi-domain and redundant mobility on Saturn's moon Titan, and potentially other bodies with atmospheres. The Shapeshifter is a collection of simple and affordable robotic units, called Cobots, comparable to personal palm-size quadcopters. By attaching and detaching with each other, multiple Cobots can shape-shift into novel structures, capable of (a) rolling on the surface, to increase the traverse range, (b) flying in a flight array formation, and (c) swimming on or under liquid. A ground station complements the robotic platform, hosting science instrumentation and providing power to recharge the batteries of the Cobots. Our Phase I study had the objective of providing an initial assessment of the feasibility of the proposed robotic platform architecture, and in particular (a) to characterize the expected science return of a mission to the Sotra-Patera region on Titan; (b) to verify the mechanical and algorithmic feasibility of building a multi-agent platform capable of flying, docking, rolling and un-docking; (c) to evaluate the increased range and efficiency of rolling on Titan w.r.t to flying; (d) to define a case-study of a mission for the exploration of the cryovolcano Sotra-Patera on Titan, whose expected variety of geological features challenges conventional mobility platforms.