 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLSGS-Loc: Towards Robust 3DGS-Based Visual Localization for Large-Scale UAV Scenarios
Apr 07, 2026Visual localization in large-scale UAV scenarios is a critical capability for autonomous systems, yet it remains challenging due to geometric complexity and environmental variations. While 3D Gaussian Splatting (3DGS) has emerged as a promising scene representation, existing 3DGS-based visual localization methods struggle with robust pose initialization and sensitivity to rendering artifacts in large-scale settings. To address these limitations, we propose LSGS-Loc, a novel visual localization pipeline tailored for large-scale 3DGS scenes. Specifically, we introduce a scale-aware pose initialization strategy that combines scene-agnostic relative pose estimation with explicit 3DGS scale constraints, enabling geometrically grounded localization without scene-specific training. Furthermore, in the pose refinement, to mitigate the impact of reconstruction artifacts such as blur and floaters, we develop a Laplacian-based reliability masking mechanism that guides photometric refinement toward high-quality regions. Extensive experiments on large-scale UAV benchmarks demonstrate that our method achieves state-of-the-art accuracy and robustness for unordered image queries, significantly outperforming existing 3DGS-based approaches. Code is available at: https://github.com/xzhang-z/LSGS-Loc
SF-Recon: Simplification-Free Lightweight Building Reconstruction via 3D Gaussian Splatting
Nov 17, 2025Lightweight building surface models are crucial for digital city, navigation, and fast geospatial analytics, yet conventional multi-view geometry pipelines remain cumbersome and quality-sensitive due to their reliance on dense reconstruction, meshing, and subsequent simplification. This work presents SF-Recon, a method that directly reconstructs lightweight building surfaces from multi-view images without post-hoc mesh simplification. We first train an initial 3D Gaussian Splatting (3DGS) field to obtain a view-consistent representation. Building structure is then distilled by a normal-gradient-guided Gaussian optimization that selects primitives aligned with roof and wall boundaries, followed by multi-view edge-consistency pruning to enhance structural sharpness and suppress non-structural artifacts without external supervision. Finally, a multi-view depth-constrained Delaunay triangulation converts the structured Gaussian field into a lightweight, structurally faithful building mesh. Based on a proposed SF dataset, the experimental results demonstrate that our SF-Recon can directly reconstruct lightweight building models from multi-view imagery, achieving substantially fewer faces and vertices while maintaining computational efficiency. Website:https://lzh282140127-cell.github.io/SF-Recon-project/
A-TDOM: Active TDOM via On-the-Fly 3DGS
Sep 16, 2025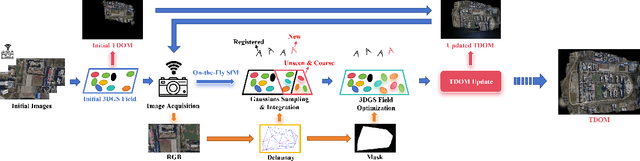
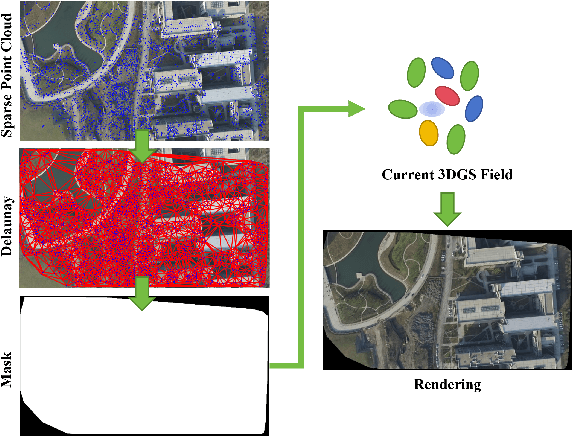
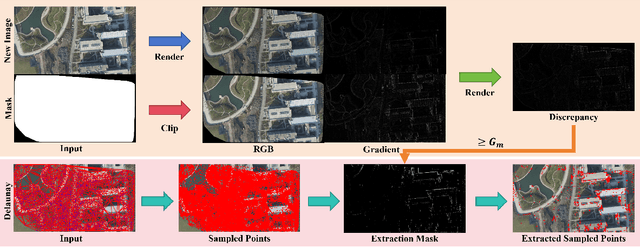
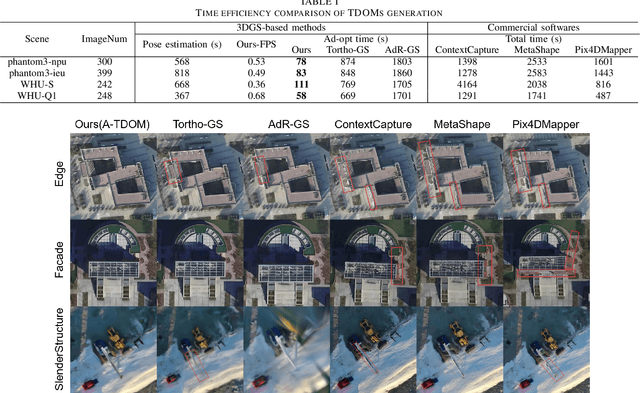
True Digital Orthophoto Map (TDOM) serves as a crucial geospatial product in various fields such as urban management, city planning, land surveying, etc. However, traditional TDOM generation methods generally rely on a complex offline photogrammetric pipeline, resulting in delays that hinder real-time applications. Moreover, the quality of TDOM may degrade due to various challenges, such as inaccurate camera poses or Digital Surface Model (DSM) and scene occlusions. To address these challenges, this work introduces A-TDOM, a near real-time TDOM generation method based on On-the-Fly 3DGS optimization. As each image is acquired, its pose and sparse point cloud are computed via On-the-Fly SfM. Then new Gaussians are integrated and optimized into previously unseen or coarsely reconstructed regions. By integrating with orthogonal splatting, A-TDOM can render just after each update of a new 3DGS field. Initial experiments on multiple benchmarks show that the proposed A-TDOM is capable of actively rendering TDOM in near real-time, with 3DGS optimization for each new image in seconds while maintaining acceptable rendering quality and TDOM geometric accuracy.
GS-I$^{3}$: Gaussian Splatting for Surface Reconstruction from Illumination-Inconsistent Images
Mar 18, 2025

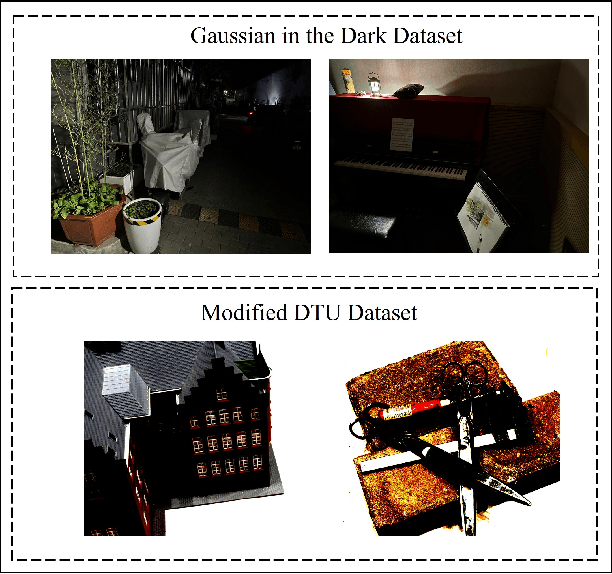
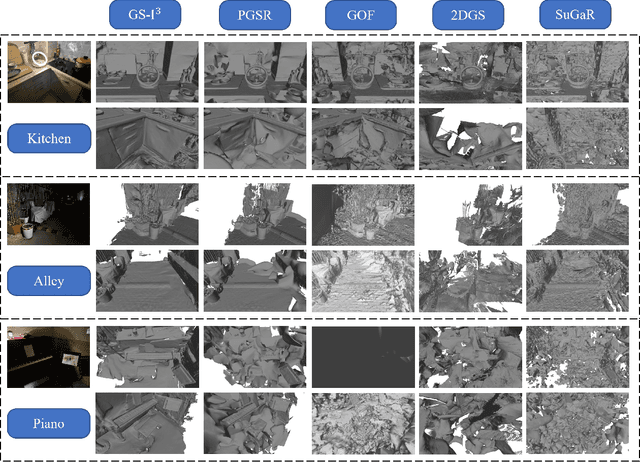
Accurate geometric surface reconstruction, providing essential environmental information for navigation and manipulation tasks, is critical for enabling robotic self-exploration and interaction. Recently, 3D Gaussian Splatting (3DGS) has gained significant attention in the field of surface reconstruction due to its impressive geometric quality and computational efficiency. While recent relevant advancements in novel view synthesis under inconsistent illumination using 3DGS have shown promise, the challenge of robust surface reconstruction under such conditions is still being explored. To address this challenge, we propose a method called GS-3I. Specifically, to mitigate 3D Gaussian optimization bias caused by underexposed regions in single-view images, based on Convolutional Neural Network (CNN), a tone mapping correction framework is introduced. Furthermore, inconsistent lighting across multi-view images, resulting from variations in camera settings and complex scene illumination, often leads to geometric constraint mismatches and deviations in the reconstructed surface. To overcome this, we propose a normal compensation mechanism that integrates reference normals extracted from single-view image with normals computed from multi-view observations to effectively constrain geometric inconsistencies. Extensive experimental evaluations demonstrate that GS-3I can achieve robust and accurate surface reconstruction across complex illumination scenarios, highlighting its effectiveness and versatility in this critical challenge. https://github.com/TFwang-9527/GS-3I
Gaussian On-the-Fly Splatting: A Progressive Framework for Robust Near Real-Time 3DGS Optimization
Mar 17, 2025
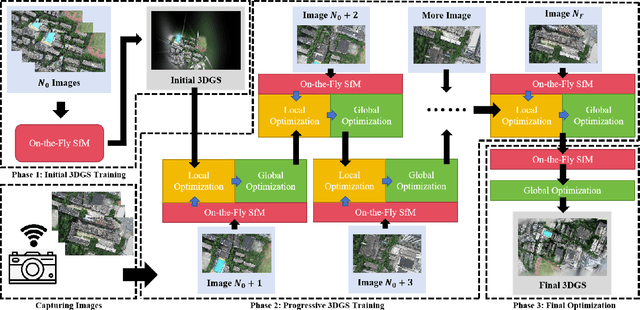


3D Gaussian Splatting (3DGS) achieves high-fidelity rendering with fast real-time performance, but existing methods rely on offline training after full Structure-from-Motion (SfM) processing. In contrast, this work introduces On-the-Fly GS, a progressive framework enabling near real-time 3DGS optimization during image capture. As each image arrives, its pose and sparse points are updated via on-the-fly SfM, and newly optimized Gaussians are immediately integrated into the 3DGS field. We propose a progressive local optimization strategy to prioritize new images and their neighbors by their corresponding overlapping relationship, allowing the new image and its overlapping images to get more training. To further stabilize training across old and new images, an adaptive learning rate schedule balances the iterations and the learning rate. Moreover, to maintain overall quality of the 3DGS field, an efficient global optimization scheme prevents overfitting to the newly added images. Experiments on multiple benchmark datasets show that our On-the-Fly GS reduces training time significantly, optimizing each new image in seconds with minimal rendering loss, offering the first practical step toward rapid, progressive 3DGS reconstruction.
GS-3I: Gaussian Splatting for Surface Reconstruction from Illumination-Inconsistent Images
Mar 16, 2025Accurate geometric surface reconstruction, providing essential environmental information for navigation and manipulation tasks, is critical for enabling robotic self-exploration and interaction. Recently, 3D Gaussian Splatting (3DGS) has gained significant attention in the field of surface reconstruction due to its impressive geometric quality and computational efficiency. While recent relevant advancements in novel view synthesis under inconsistent illumination using 3DGS have shown promise, the challenge of robust surface reconstruction under such conditions is still being explored. To address this challenge, we propose a method called GS-3I. Specifically, to mitigate 3D Gaussian optimization bias caused by underexposed regions in single-view images, based on Convolutional Neural Network (CNN), a tone mapping correction framework is introduced. Furthermore, inconsistent lighting across multi-view images, resulting from variations in camera settings and complex scene illumination, often leads to geometric constraint mismatches and deviations in the reconstructed surface. To overcome this, we propose a normal compensation mechanism that integrates reference normals extracted from single-view image with normals computed from multi-view observations to effectively constrain geometric inconsistencies. Extensive experimental evaluations demonstrate that GS-3I can achieve robust and accurate surface reconstruction across complex illumination scenarios, highlighting its effectiveness and versatility in this critical challenge. https://github.com/TFwang-9527/GS-3I
PG-SAG: Parallel Gaussian Splatting for Fine-Grained Large-Scale Urban Buildings Reconstruction via Semantic-Aware Grouping
Jan 03, 2025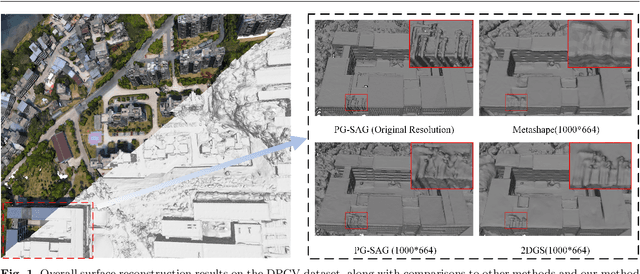
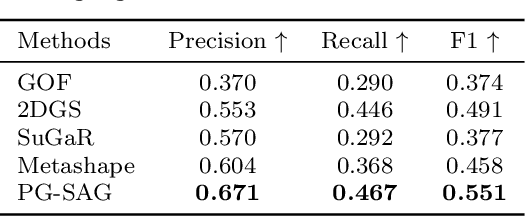


3D Gaussian Splatting (3DGS) has emerged as a transformative method in the field of real-time novel synthesis. Based on 3DGS, recent advancements cope with large-scale scenes via spatial-based partition strategy to reduce video memory and optimization time costs. In this work, we introduce a parallel Gaussian splatting method, termed PG-SAG, which fully exploits semantic cues for both partitioning and Gaussian kernel optimization, enabling fine-grained building surface reconstruction of large-scale urban areas without downsampling the original image resolution. First, the Cross-modal model - Language Segment Anything is leveraged to segment building masks. Then, the segmented building regions is grouped into sub-regions according to the visibility check across registered images. The Gaussian kernels for these sub-regions are optimized in parallel with masked pixels. In addition, the normal loss is re-formulated for the detected edges of masks to alleviate the ambiguities in normal vectors on edges. Finally, to improve the optimization of 3D Gaussians, we introduce a gradient-constrained balance-load loss that accounts for the complexity of the corresponding scenes, effectively minimizing the thread waiting time in the pixel-parallel rendering stage as well as the reconstruction lost. Extensive experiments are tested on various urban datasets, the results demonstrated the superior performance of our PG-SAG on building surface reconstruction, compared to several state-of-the-art 3DGS-based methods. Project Web:https://github.com/TFWang-9527/PG-SAG.
Tortho-Gaussian: Splatting True Digital Orthophoto Maps
Nov 29, 2024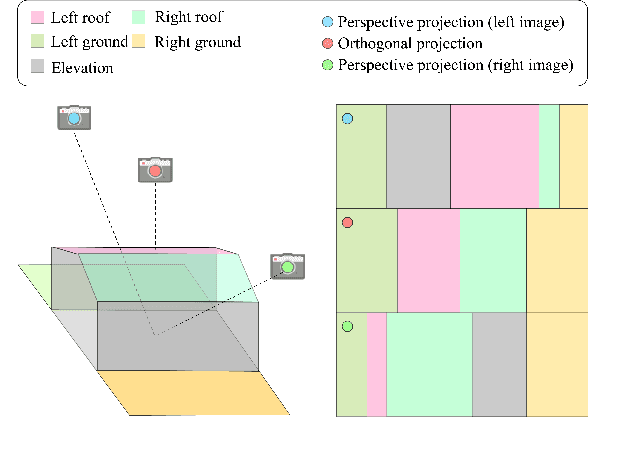
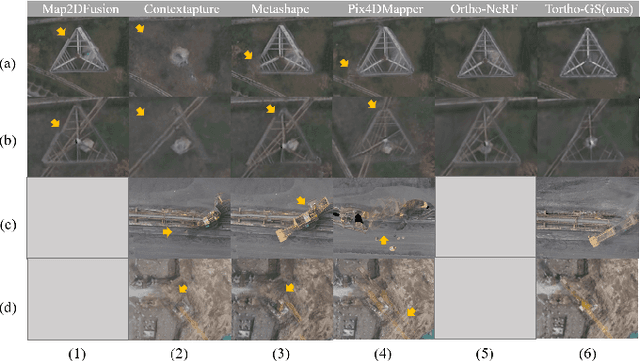
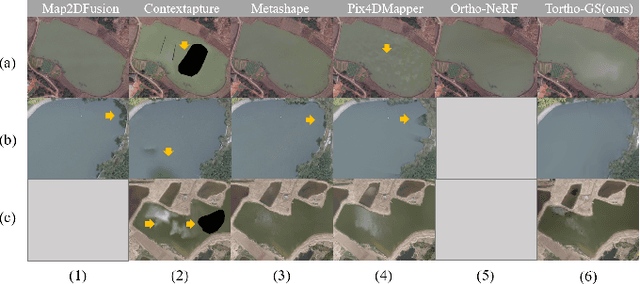
True Digital Orthophoto Maps (TDOMs) are essential products for digital twins and Geographic Information Systems (GIS). Traditionally, TDOM generation involves a complex set of traditional photogrammetric process, which may deteriorate due to various challenges, including inaccurate Digital Surface Model (DSM), degenerated occlusion detections, and visual artifacts in weak texture regions and reflective surfaces, etc. To address these challenges, we introduce TOrtho-Gaussian, a novel method inspired by 3D Gaussian Splatting (3DGS) that generates TDOMs through orthogonal splatting of optimized anisotropic Gaussian kernel. More specifically, we first simplify the orthophoto generation by orthographically splatting the Gaussian kernels onto 2D image planes, formulating a geometrically elegant solution that avoids the need for explicit DSM and occlusion detection. Second, to produce TDOM of large-scale area, a divide-and-conquer strategy is adopted to optimize memory usage and time efficiency of training and rendering for 3DGS. Lastly, we design a fully anisotropic Gaussian kernel that adapts to the varying characteristics of different regions, particularly improving the rendering quality of reflective surfaces and slender structures. Extensive experimental evaluations demonstrate that our method outperforms existing commercial software in several aspects, including the accuracy of building boundaries, the visual quality of low-texture regions and building facades. These results underscore the potential of our approach for large-scale urban scene reconstruction, offering a robust alternative for enhancing TDOM quality and scalability.
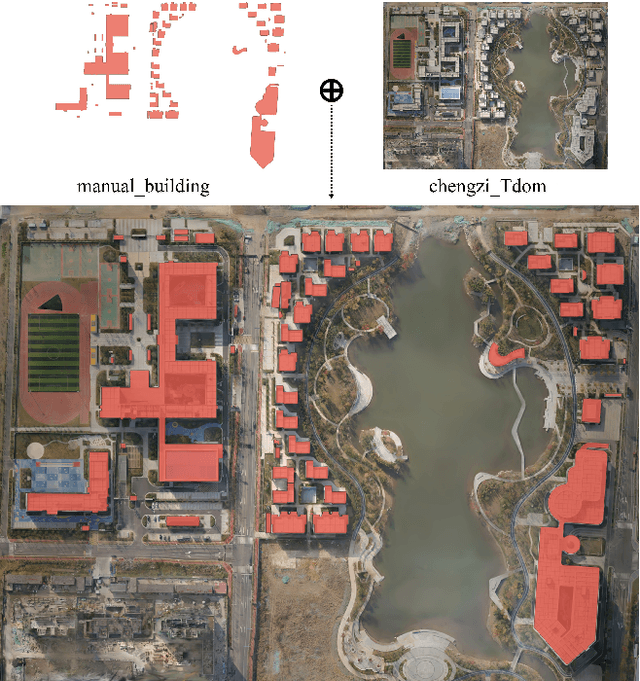
MGFs: Masked Gaussian Fields for Meshing Building based on Multi-View Images
Aug 06, 2024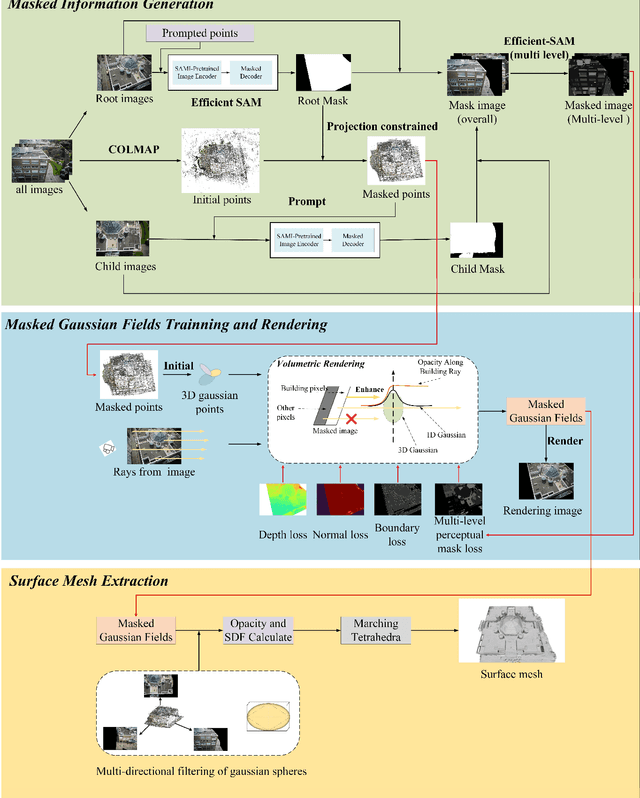
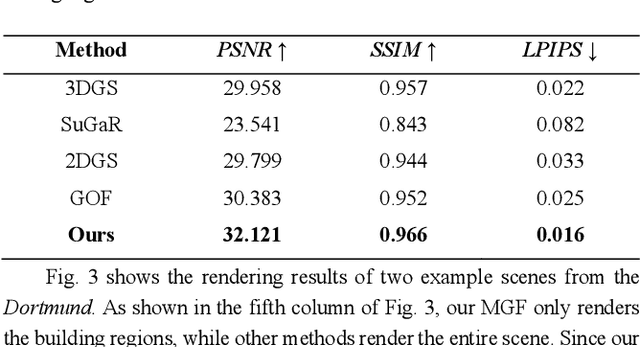
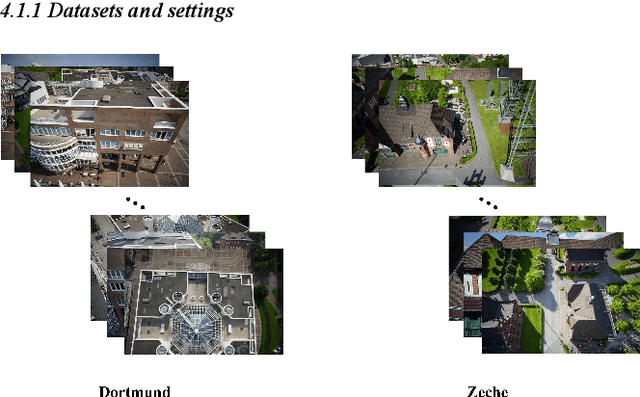
Over the last few decades, image-based building surface reconstruction has garnered substantial research interest and has been applied across various fields, such as heritage preservation, architectural planning, etc. Compared to the traditional photogrammetric and NeRF-based solutions, recently, Gaussian fields-based methods have exhibited significant potential in generating surface meshes due to their time-efficient training and detailed 3D information preservation. However, most gaussian fields-based methods are trained with all image pixels, encompassing building and nonbuilding areas, which results in a significant noise for building meshes and degeneration in time efficiency. This paper proposes a novel framework, Masked Gaussian Fields (MGFs), designed to generate accurate surface reconstruction for building in a time-efficient way. The framework first applies EfficientSAM and COLMAP to generate multi-level masks of building and the corresponding masked point clouds. Subsequently, the masked gaussian fields are trained by integrating two innovative losses: a multi-level perceptual masked loss focused on constructing building regions and a boundary loss aimed at enhancing the details of the boundaries between different masks. Finally, we improve the tetrahedral surface mesh extraction method based on the masked gaussian spheres. Comprehensive experiments on UAV images demonstrate that, compared to the traditional method and several NeRF-based and Gaussian-based SOTA solutions, our approach significantly improves both the accuracy and efficiency of building surface reconstruction. Notably, as a byproduct, there is an additional gain in the novel view synthesis of building.
On-the-Fly SfM: What you capture is What you get
Sep 21, 2023Over the last decades, ample achievements have been made on Structure from motion (SfM). However, the vast majority of them basically work in an offline manner, i.e., images are firstly captured and then fed together into a SfM pipeline for obtaining poses and sparse point cloud. In this work, on the contrary, we present an on-the-fly SfM: running online SfM while image capturing, the newly taken On-the-Fly image is online estimated with the corresponding pose and points, i.e., what you capture is what you get. Specifically, our approach firstly employs a vocabulary tree that is unsupervised trained using learning-based global features for fast image retrieval of newly fly-in image. Then, a robust feature matching mechanism with least squares (LSM) is presented to improve image registration performance. Finally, via investigating the influence of newly fly-in image's connected neighboring images, an efficient hierarchical weighted local bundle adjustment (BA) is used for optimization. Extensive experimental results demonstrate that on-the-fly SfM can meet the goal of robustly registering the images while capturing in an online way.