 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGS-I$^{3}$: Gaussian Splatting for Surface Reconstruction from Illumination-Inconsistent Images
Mar 18, 2025

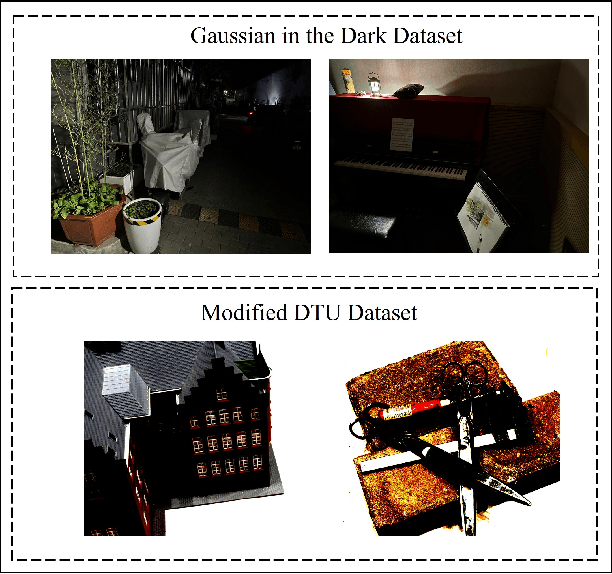
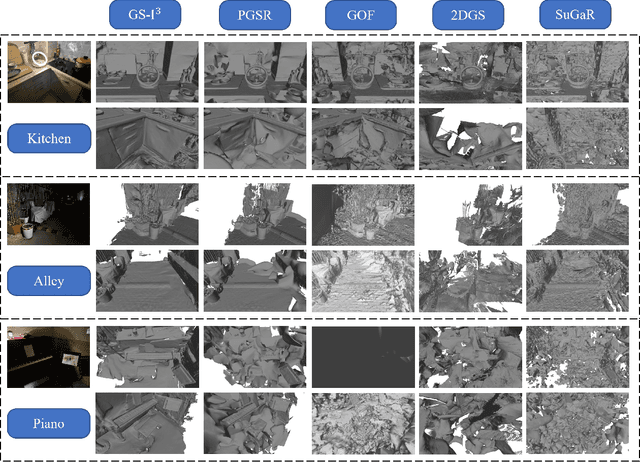
Accurate geometric surface reconstruction, providing essential environmental information for navigation and manipulation tasks, is critical for enabling robotic self-exploration and interaction. Recently, 3D Gaussian Splatting (3DGS) has gained significant attention in the field of surface reconstruction due to its impressive geometric quality and computational efficiency. While recent relevant advancements in novel view synthesis under inconsistent illumination using 3DGS have shown promise, the challenge of robust surface reconstruction under such conditions is still being explored. To address this challenge, we propose a method called GS-3I. Specifically, to mitigate 3D Gaussian optimization bias caused by underexposed regions in single-view images, based on Convolutional Neural Network (CNN), a tone mapping correction framework is introduced. Furthermore, inconsistent lighting across multi-view images, resulting from variations in camera settings and complex scene illumination, often leads to geometric constraint mismatches and deviations in the reconstructed surface. To overcome this, we propose a normal compensation mechanism that integrates reference normals extracted from single-view image with normals computed from multi-view observations to effectively constrain geometric inconsistencies. Extensive experimental evaluations demonstrate that GS-3I can achieve robust and accurate surface reconstruction across complex illumination scenarios, highlighting its effectiveness and versatility in this critical challenge. https://github.com/TFwang-9527/GS-3I
GS-3I: Gaussian Splatting for Surface Reconstruction from Illumination-Inconsistent Images
Mar 16, 2025Accurate geometric surface reconstruction, providing essential environmental information for navigation and manipulation tasks, is critical for enabling robotic self-exploration and interaction. Recently, 3D Gaussian Splatting (3DGS) has gained significant attention in the field of surface reconstruction due to its impressive geometric quality and computational efficiency. While recent relevant advancements in novel view synthesis under inconsistent illumination using 3DGS have shown promise, the challenge of robust surface reconstruction under such conditions is still being explored. To address this challenge, we propose a method called GS-3I. Specifically, to mitigate 3D Gaussian optimization bias caused by underexposed regions in single-view images, based on Convolutional Neural Network (CNN), a tone mapping correction framework is introduced. Furthermore, inconsistent lighting across multi-view images, resulting from variations in camera settings and complex scene illumination, often leads to geometric constraint mismatches and deviations in the reconstructed surface. To overcome this, we propose a normal compensation mechanism that integrates reference normals extracted from single-view image with normals computed from multi-view observations to effectively constrain geometric inconsistencies. Extensive experimental evaluations demonstrate that GS-3I can achieve robust and accurate surface reconstruction across complex illumination scenarios, highlighting its effectiveness and versatility in this critical challenge. https://github.com/TFwang-9527/GS-3I
PG-SAG: Parallel Gaussian Splatting for Fine-Grained Large-Scale Urban Buildings Reconstruction via Semantic-Aware Grouping
Jan 03, 2025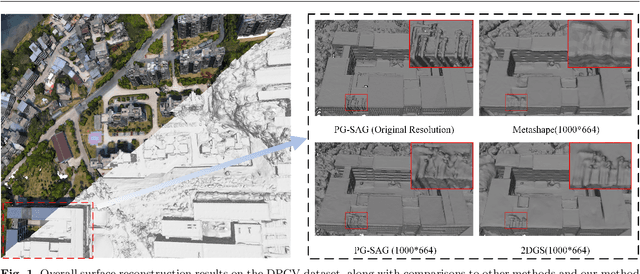
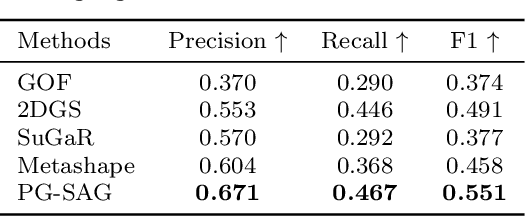


3D Gaussian Splatting (3DGS) has emerged as a transformative method in the field of real-time novel synthesis. Based on 3DGS, recent advancements cope with large-scale scenes via spatial-based partition strategy to reduce video memory and optimization time costs. In this work, we introduce a parallel Gaussian splatting method, termed PG-SAG, which fully exploits semantic cues for both partitioning and Gaussian kernel optimization, enabling fine-grained building surface reconstruction of large-scale urban areas without downsampling the original image resolution. First, the Cross-modal model - Language Segment Anything is leveraged to segment building masks. Then, the segmented building regions is grouped into sub-regions according to the visibility check across registered images. The Gaussian kernels for these sub-regions are optimized in parallel with masked pixels. In addition, the normal loss is re-formulated for the detected edges of masks to alleviate the ambiguities in normal vectors on edges. Finally, to improve the optimization of 3D Gaussians, we introduce a gradient-constrained balance-load loss that accounts for the complexity of the corresponding scenes, effectively minimizing the thread waiting time in the pixel-parallel rendering stage as well as the reconstruction lost. Extensive experiments are tested on various urban datasets, the results demonstrated the superior performance of our PG-SAG on building surface reconstruction, compared to several state-of-the-art 3DGS-based methods. Project Web:https://github.com/TFWang-9527/PG-SAG.