 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSF-Recon: Simplification-Free Lightweight Building Reconstruction via 3D Gaussian Splatting
Nov 17, 2025Lightweight building surface models are crucial for digital city, navigation, and fast geospatial analytics, yet conventional multi-view geometry pipelines remain cumbersome and quality-sensitive due to their reliance on dense reconstruction, meshing, and subsequent simplification. This work presents SF-Recon, a method that directly reconstructs lightweight building surfaces from multi-view images without post-hoc mesh simplification. We first train an initial 3D Gaussian Splatting (3DGS) field to obtain a view-consistent representation. Building structure is then distilled by a normal-gradient-guided Gaussian optimization that selects primitives aligned with roof and wall boundaries, followed by multi-view edge-consistency pruning to enhance structural sharpness and suppress non-structural artifacts without external supervision. Finally, a multi-view depth-constrained Delaunay triangulation converts the structured Gaussian field into a lightweight, structurally faithful building mesh. Based on a proposed SF dataset, the experimental results demonstrate that our SF-Recon can directly reconstruct lightweight building models from multi-view imagery, achieving substantially fewer faces and vertices while maintaining computational efficiency. Website:https://lzh282140127-cell.github.io/SF-Recon-project/
A-TDOM: Active TDOM via On-the-Fly 3DGS
Sep 16, 2025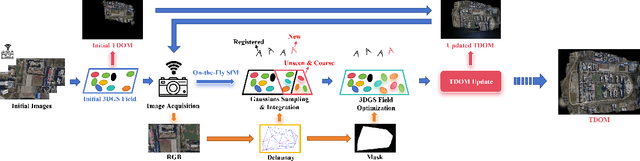
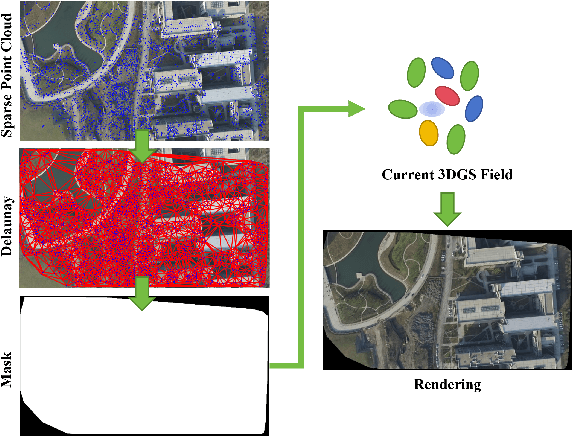
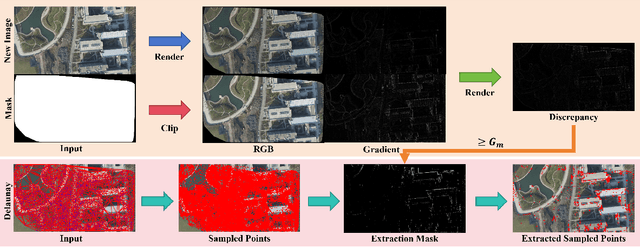
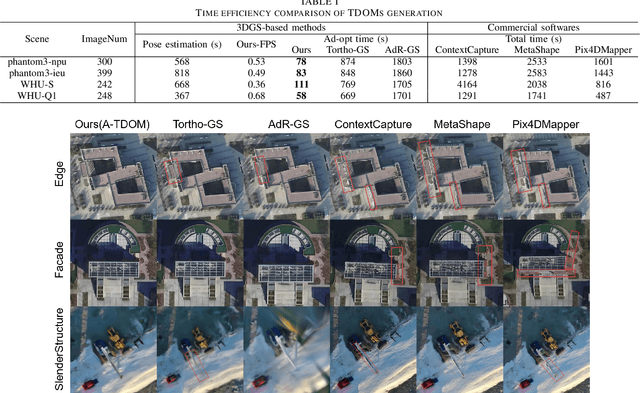
True Digital Orthophoto Map (TDOM) serves as a crucial geospatial product in various fields such as urban management, city planning, land surveying, etc. However, traditional TDOM generation methods generally rely on a complex offline photogrammetric pipeline, resulting in delays that hinder real-time applications. Moreover, the quality of TDOM may degrade due to various challenges, such as inaccurate camera poses or Digital Surface Model (DSM) and scene occlusions. To address these challenges, this work introduces A-TDOM, a near real-time TDOM generation method based on On-the-Fly 3DGS optimization. As each image is acquired, its pose and sparse point cloud are computed via On-the-Fly SfM. Then new Gaussians are integrated and optimized into previously unseen or coarsely reconstructed regions. By integrating with orthogonal splatting, A-TDOM can render just after each update of a new 3DGS field. Initial experiments on multiple benchmarks show that the proposed A-TDOM is capable of actively rendering TDOM in near real-time, with 3DGS optimization for each new image in seconds while maintaining acceptable rendering quality and TDOM geometric accuracy.
Gaussian On-the-Fly Splatting: A Progressive Framework for Robust Near Real-Time 3DGS Optimization
Mar 17, 20253D Gaussian Splatting (3DGS) achieves high-fidelity rendering with fast real-time performance, but existing methods rely on offline training after full Structure-from-Motion (SfM) processing. In contrast, this work introduces On-the-Fly GS, a progressive framework enabling near real-time 3DGS optimization during image capture. As each image arrives, its pose and sparse points are updated via on-the-fly SfM, and newly optimized Gaussians are immediately integrated into the 3DGS field. We propose a progressive local optimization strategy to prioritize new images and their neighbors by their corresponding overlapping relationship, allowing the new image and its overlapping images to get more training. To further stabilize training across old and new images, an adaptive learning rate schedule balances the iterations and the learning rate. Moreover, to maintain overall quality of the 3DGS field, an efficient global optimization scheme prevents overfitting to the newly added images. Experiments on multiple benchmark datasets show that our On-the-Fly GS reduces training time significantly, optimizing each new image in seconds with minimal rendering loss, offering the first practical step toward rapid, progressive 3DGS reconstruction.
Exploring the potential of collaborative UAV 3D mapping in Kenyan savanna for wildlife research
Sep 24, 2024



UAV-based biodiversity conservation applications have exhibited many data acquisition advantages for researchers. UAV platforms with embedded data processing hardware can support conservation challenges through 3D habitat mapping, surveillance and monitoring solutions. High-quality real-time scene reconstruction as well as real-time UAV localization can optimize the exploration vs exploitation balance of single or collaborative mission. In this work, we explore the potential of two collaborative frameworks - Visual Simultaneous Localization and Mapping (V-SLAM) and Structure-from-Motion (SfM) for 3D mapping purposes and compare results with standard offline approaches.