 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResolving State Ambiguity in Robot Manipulation via Adaptive Working Memory Recoding
Dec 31, 2025State ambiguity is common in robotic manipulation. Identical observations may correspond to multiple valid behavior trajectories. The visuomotor policy must correctly extract the appropriate types and levels of information from the history to identify the current task phase. However, naively extending the history window is computationally expensive and may cause severe overfitting. Inspired by the continuous nature of human reasoning and the recoding of working memory, we introduce PAM, a novel visuomotor Policy equipped with Adaptive working Memory. With minimal additional training cost in a two-stage manner, PAM supports a 300-frame history window while maintaining high inference speed. Specifically, a hierarchical frame feature extractor yields two distinct representations for motion primitives and temporal disambiguation. For compact representation, a context router with range-specific queries is employed to produce compact context features across multiple history lengths. And an auxiliary objective of reconstructing historical information is introduced to ensure that the context router acts as an effective bottleneck. We meticulously design 7 tasks and verify that PAM can handle multiple scenarios of state ambiguity simultaneously. With a history window of approximately 10 seconds, PAM still supports stable training and maintains inference speeds above 20Hz. Project website: https://tinda24.github.io/pam/
Drive in Corridors: Enhancing the Safety of End-to-end Autonomous Driving via Corridor Learning and Planning
Apr 10, 2025Safety remains one of the most critical challenges in autonomous driving systems. In recent years, the end-to-end driving has shown great promise in advancing vehicle autonomy in a scalable manner. However, existing approaches often face safety risks due to the lack of explicit behavior constraints. To address this issue, we uncover a new paradigm by introducing the corridor as the intermediate representation. Widely adopted in robotics planning, the corridors represents spatio-temporal obstacle-free zones for the vehicle to traverse. To ensure accurate corridor prediction in diverse traffic scenarios, we develop a comprehensive learning pipeline including data annotation, architecture refinement and loss formulation. The predicted corridor is further integrated as the constraint in a trajectory optimization process. By extending the differentiability of the optimization, we enable the optimized trajectory to be seamlessly trained within the end-to-end learning framework, improving both safety and interpretability. Experimental results on the nuScenes dataset demonstrate state-of-the-art performance of our approach, showing a 66.7% reduction in collisions with agents and a 46.5% reduction with curbs, significantly enhancing the safety of end-to-end driving. Additionally, incorporating the corridor contributes to higher success rates in closed-loop evaluations.
FriendsQA: A New Large-Scale Deep Video Understanding Dataset with Fine-grained Topic Categorization for Story Videos
Dec 22, 2024Video question answering (VideoQA) aims to answer natural language questions according to the given videos. Although existing models perform well in the factoid VideoQA task, they still face challenges in deep video understanding (DVU) task, which focuses on story videos. Compared to factoid videos, the most significant feature of story videos is storylines, which are composed of complex interactions and long-range evolvement of core story topics including characters, actions and locations. Understanding these topics requires models to possess DVU capability. However, existing DVU datasets rarely organize questions according to these story topics, making them difficult to comprehensively assess VideoQA models' DVU capability of complex storylines. Additionally, the question quantity and video length of these dataset are limited by high labor costs of handcrafted dataset building method. In this paper, we devise a large language model based multi-agent collaboration framework, StoryMind, to automatically generate a new large-scale DVU dataset. The dataset, FriendsQA, derived from the renowned sitcom Friends with an average episode length of 1,358 seconds, contains 44.6K questions evenly distributed across 14 fine-grained topics. Finally, We conduct comprehensive experiments on 10 state-of-the-art VideoQA models using the FriendsQA dataset.
Hybrid Gaussian Process Regression with Temporal Feature Extraction for Partially Interpretable Remaining Useful Life Interval Prediction in Aeroengine Prognostics
Nov 19, 2024The estimation of Remaining Useful Life (RUL) plays a pivotal role in intelligent manufacturing systems and Industry 4.0 technologies. While recent advancements have improved RUL prediction, many models still face interpretability and compelling uncertainty modeling challenges. This paper introduces a modified Gaussian Process Regression (GPR) model for RUL interval prediction, tailored for the complexities of manufacturing process development. The modified GPR predicts confidence intervals by learning from historical data and addresses uncertainty modeling in a more structured way. The approach effectively captures intricate time-series patterns and dynamic behaviors inherent in modern manufacturing systems by coupling GPR with deep adaptive learning-enhanced AI process models. Moreover, the model evaluates feature significance to ensure more transparent decision-making, which is crucial for optimizing manufacturing processes. This comprehensive approach supports more accurate RUL predictions and provides transparent, interpretable insights into uncertainty, contributing to robust process development and management.
HGS-Planner: Hierarchical Planning Framework for Active Scene Reconstruction Using 3D Gaussian Splatting
Sep 26, 2024In complex missions such as search and rescue,robots must make intelligent decisions in unknown environments, relying on their ability to perceive and understand their surroundings. High-quality and real-time reconstruction enhances situational awareness and is crucial for intelligent robotics. Traditional methods often struggle with poor scene representation or are too slow for real-time use. Inspired by the efficacy of 3D Gaussian Splatting (3DGS), we propose a hierarchical planning framework for fast and high-fidelity active reconstruction. Our method evaluates completion and quality gain to adaptively guide reconstruction, integrating global and local planning for efficiency. Experiments in simulated and real-world environments show our approach outperforms existing real-time methods.
ROSfs: A User-Level File System for ROS
Jun 15, 2024We present ROSfs, a novel user-level file system for the Robot Operating System (ROS). ROSfs interprets a robot file as a group of sub-files, with each having a distinct label. ROSfs applies a time index structure to enhance the flexible data query while the data file is under modification. It provides multi-robot systems (MRS) with prompt cross-robot data acquisition and collaboration. We implemented a ROSfs prototype and integrated it into a mainstream ROS platform. We then applied and evaluated ROSfs on real-world UAVs and data servers. Evaluation results show that compared with traditional ROS storage methods, ROSfs improves the offline query performance by up to 129x and reduces inter-robot online data query latency under a wireless network by up to 7x.
HGS-Mapping: Online Dense Mapping Using Hybrid Gaussian Representation in Urban Scenes
Mar 29, 2024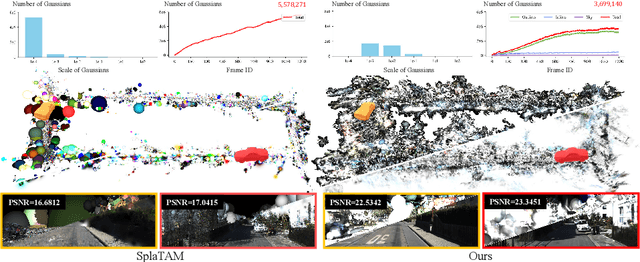
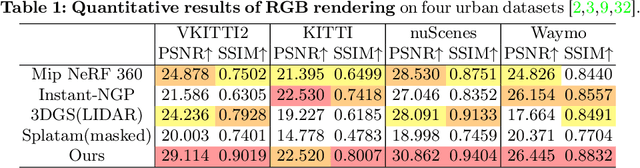
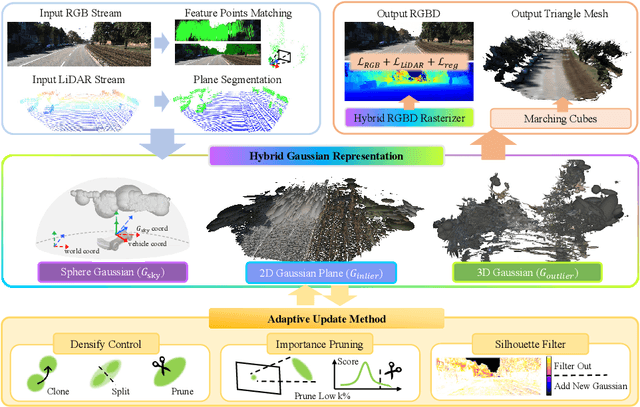
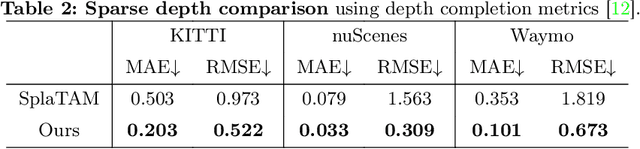
Online dense mapping of urban scenes forms a fundamental cornerstone for scene understanding and navigation of autonomous vehicles. Recent advancements in mapping methods are mainly based on NeRF, whose rendering speed is too slow to meet online requirements. 3D Gaussian Splatting (3DGS), with its rendering speed hundreds of times faster than NeRF, holds greater potential in online dense mapping. However, integrating 3DGS into a street-view dense mapping framework still faces two challenges, including incomplete reconstruction due to the absence of geometric information beyond the LiDAR coverage area and extensive computation for reconstruction in large urban scenes. To this end, we propose HGS-Mapping, an online dense mapping framework in unbounded large-scale scenes. To attain complete construction, our framework introduces Hybrid Gaussian Representation, which models different parts of the entire scene using Gaussians with distinct properties. Furthermore, we employ a hybrid Gaussian initialization mechanism and an adaptive update method to achieve high-fidelity and rapid reconstruction. To the best of our knowledge, we are the first to integrate Gaussian representation into online dense mapping of urban scenes. Our approach achieves SOTA reconstruction accuracy while only employing 66% number of Gaussians, leading to 20% faster reconstruction speed.
Sequential Sentence Matching Network for Multi-turn Response Selection in Retrieval-based Chatbots
May 16, 2020

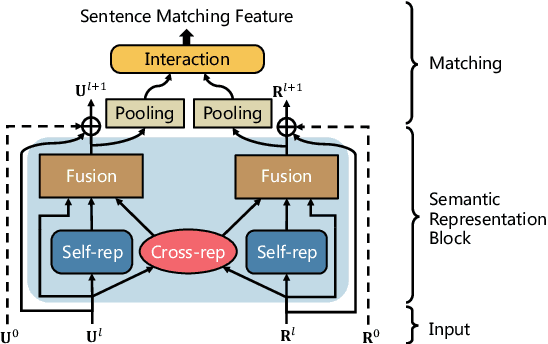

Recently, open domain multi-turn chatbots have attracted much interest from lots of researchers in both academia and industry. The dominant retrieval-based methods use context-response matching mechanisms for multi-turn response selection. Specifically, the state-of-the-art methods perform the context-response matching by word or segment similarity. However, these models lack a full exploitation of the sentence-level semantic information, and make simple mistakes that humans can easily avoid. In this work, we propose a matching network, called sequential sentence matching network (S2M), to use the sentence-level semantic information to address the problem. Firstly and most importantly, we find that by using the sentence-level semantic information, the network successfully addresses the problem and gets a significant improvement on matching, resulting in a state-of-the-art performance. Furthermore, we integrate the sentence matching we introduced here and the usual word similarity matching reported in the current literature, to match at different semantic levels. Experiments on three public data sets show that such integration further improves the model performance.