 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Gaussian Process Regression with Temporal Feature Extraction for Partially Interpretable Remaining Useful Life Interval Prediction in Aeroengine Prognostics
Nov 19, 2024The estimation of Remaining Useful Life (RUL) plays a pivotal role in intelligent manufacturing systems and Industry 4.0 technologies. While recent advancements have improved RUL prediction, many models still face interpretability and compelling uncertainty modeling challenges. This paper introduces a modified Gaussian Process Regression (GPR) model for RUL interval prediction, tailored for the complexities of manufacturing process development. The modified GPR predicts confidence intervals by learning from historical data and addresses uncertainty modeling in a more structured way. The approach effectively captures intricate time-series patterns and dynamic behaviors inherent in modern manufacturing systems by coupling GPR with deep adaptive learning-enhanced AI process models. Moreover, the model evaluates feature significance to ensure more transparent decision-making, which is crucial for optimizing manufacturing processes. This comprehensive approach supports more accurate RUL predictions and provides transparent, interpretable insights into uncertainty, contributing to robust process development and management.
Planning by Simulation: Motion Planning with Learning-based Parallel Scenario Prediction for Autonomous Driving
Nov 15, 2024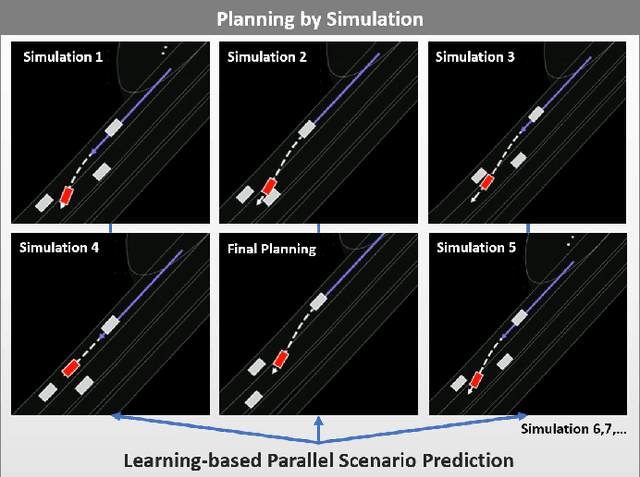
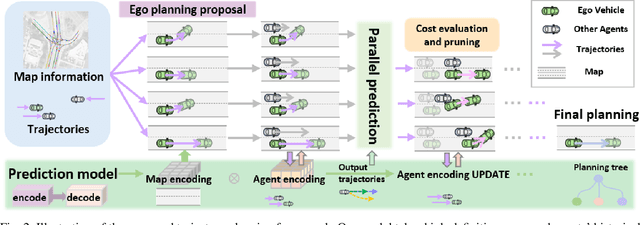
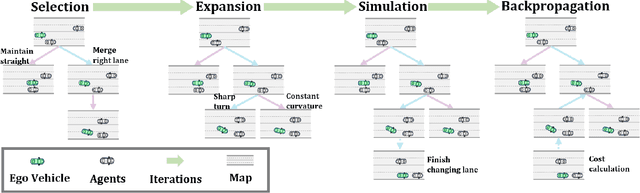
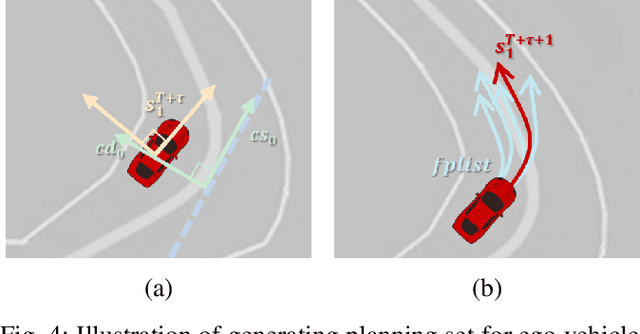
Planning safe trajectories for autonomous vehicles is essential for operational safety but remains extremely challenging due to the complex interactions among traffic participants. Recent autonomous driving frameworks have focused on improving prediction accuracy to explicitly model these interactions. However, some methods overlook the significant influence of the ego vehicle's planning on the possible trajectories of other agents, which can alter prediction accuracy and lead to unsafe planning decisions. In this paper, we propose a novel motion Planning approach by Simulation with learning-based parallel scenario prediction (PS). PS deduces predictions iteratively based on Monte Carlo Tree Search (MCTS), jointly inferring scenarios that cooperate with the ego vehicle's planning set. Our method simulates possible scenes and calculates their costs after the ego vehicle executes potential actions. To balance and prune unreasonable actions and scenarios, we adopt MCTS as the foundation to explore possible future interactions encoded within the prediction network. Moreover, the query-centric trajectory prediction streamlines our scene generation, enabling a sophisticated framework that captures the mutual influence between other agents' predictions and the ego vehicle's planning. We evaluate our framework on the Argoverse 2 dataset, and the results demonstrate that our approach effectively achieves parallel ego vehicle planning.