 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-Informed Neural Network with Adaptive Clustering Learning Mechanism for Information Popularity Prediction
Mar 20, 2026With society entering the Internet era, the volume and speed of data and information have been increasing. Predicting the popularity of information cascades can help with high-value information delivery and public opinion monitoring on the internet platforms. The current state-of-the-art models for predicting information popularity utilize deep learning methods such as graph convolution networks (GCNs) and recurrent neural networks (RNNs) to capture early cascades and temporal features to predict their popularity increments. However, these previous methods mainly focus on the micro features of information cascades, neglecting their general macroscopic patterns. Furthermore, they also lack consideration of the impact of information heterogeneity on spread popularity. To overcome these limitations, we propose a physics-informed neural network with adaptive clustering learning mechanism, PIACN, for predicting the popularity of information cascades. Our proposed model not only models the macroscopic patterns of information dissemination through physics-informed approach for the first time but also considers the influence of information heterogeneity through an adaptive clustering learning mechanism. Extensive experimental results on three real-world datasets demonstrate that our model significantly outperforms other state-of-the-art methods in predicting information popularity.
High-fidelity Multiphysics Modelling for Rapid Predictions Using Physics-informed Parallel Neural Operator
Feb 26, 2025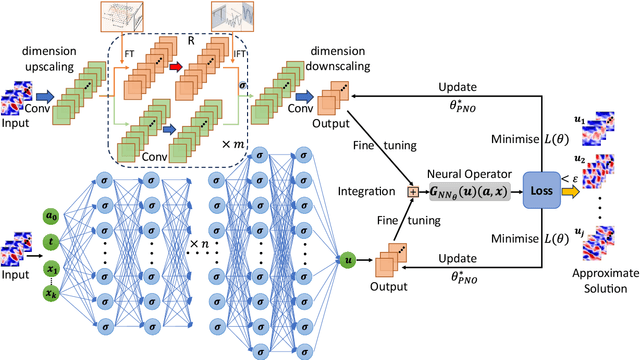
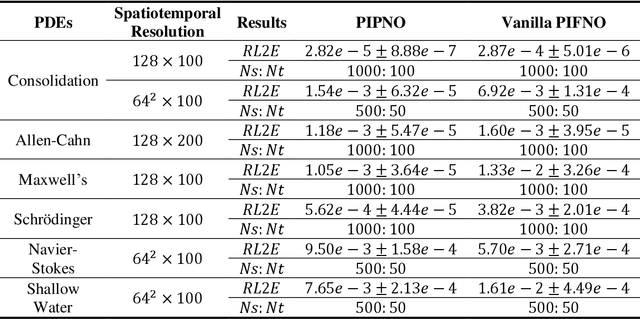
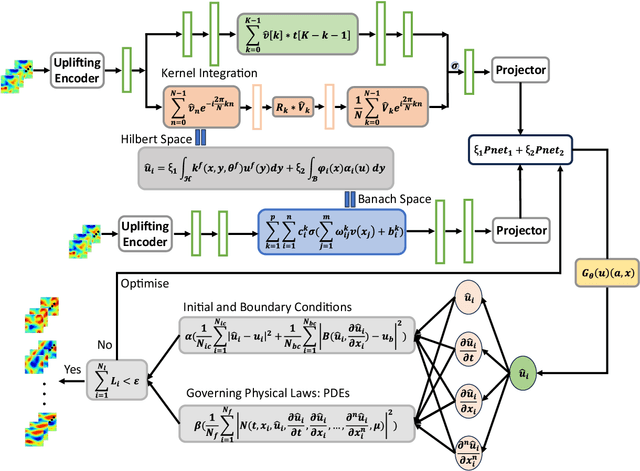
Modelling complex multiphysics systems governed by nonlinear and strongly coupled partial differential equations (PDEs) is a cornerstone in computational science and engineering. However, it remains a formidable challenge for traditional numerical solvers due to high computational cost, making them impractical for large-scale applications. Neural operators' reliance on data-driven training limits their applicability in real-world scenarios, as data is often scarce or expensive to obtain. Here, we propose a novel paradigm, physics-informed parallel neural operator (PIPNO), a scalable and unsupervised learning framework that enables data-free PDE modelling by leveraging only governing physical laws. The parallel kernel integration design, incorporating ensemble learning, significantly enhances both compatibility and computational efficiency, enabling scalable operator learning for nonlinear and strongly coupled PDEs. PIPNO efficiently captures nonlinear operator mappings across diverse physics, including geotechnical engineering, material science, electromagnetism, quantum mechanics, and fluid dynamics. The proposed method achieves high-fidelity and rapid predictions, outperforming existing operator learning approaches in modelling nonlinear and strongly coupled multiphysics systems. Therefore, PIPNO offers a powerful alternative to conventional solvers, broadening the applicability of neural operators for multiphysics modelling while ensuring efficiency, robustness, and scalability.
A Distance Similarity-based Genetic Optimization Algorithm for Satellite Ground Network Planning Considering Feeding Mode
Aug 29, 2024

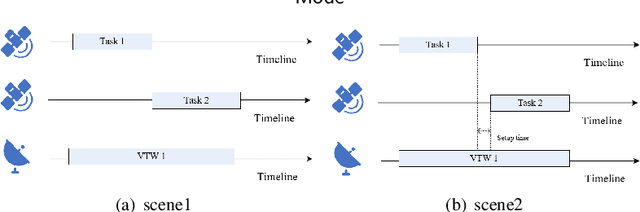
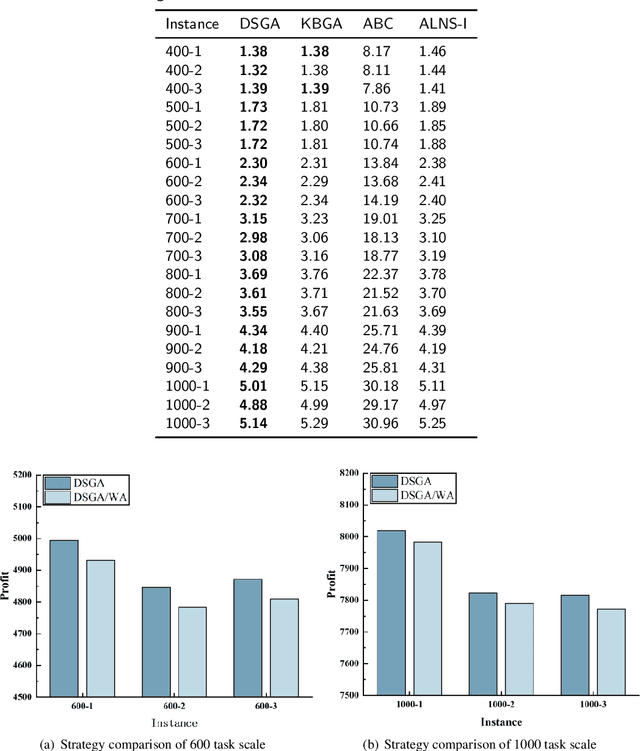
With the rapid development of the satellite industry, the information transmission network based on communication satellites has gradually become a major and important part of the future satellite ground integration network. However, the low transmission efficiency of the satellite data relay back mission has become a problem that is currently constraining the construction of the system and needs to be solved urgently. Effectively planning the task of satellite ground networking by reasonably scheduling resources is crucial for the efficient transmission of task data. In this paper, we hope to provide a task execution scheme that maximizes the profit of the networking task for satellite ground network planning considering feeding mode (SGNPFM). To solve the SGNPFM problem, a mixed-integer planning model with the objective of maximizing the gain of the link-building task is constructed, which considers various constraints of the satellite in the feed-switching mode. Based on the problem characteristics, we propose a distance similarity-based genetic optimization algorithm (DSGA), which considers the state characteristics between the tasks and introduces a weighted Euclidean distance method to determine the similarity between the tasks. To obtain more high-quality solutions, different similarity evaluation methods are designed to assist the algorithm in intelligently screening individuals. The DSGA also uses an adaptive crossover strategy based on similarity mechanism, which guides the algorithm to achieve efficient population search. In addition, a task scheduling algorithm considering the feed-switching mode is designed for decoding the algorithm to generate a high-quality scheme. The results of simulation experiments show that the DSGA can effectively solve the SGNPFM problem.
ROSfs: A User-Level File System for ROS
Jun 15, 2024



We present ROSfs, a novel user-level file system for the Robot Operating System (ROS). ROSfs interprets a robot file as a group of sub-files, with each having a distinct label. ROSfs applies a time index structure to enhance the flexible data query while the data file is under modification. It provides multi-robot systems (MRS) with prompt cross-robot data acquisition and collaboration. We implemented a ROSfs prototype and integrated it into a mainstream ROS platform. We then applied and evaluated ROSfs on real-world UAVs and data servers. Evaluation results show that compared with traditional ROS storage methods, ROSfs improves the offline query performance by up to 129x and reduces inter-robot online data query latency under a wireless network by up to 7x.
A Knowledge-driven Memetic Algorithm for the Energy-efficient Distributed Homogeneous Flow Shop Scheduling Problem
Apr 28, 2024



The reduction of carbon emissions in the manufacturing industry holds significant importance in achieving the national "double carbon" target. Ensuring energy efficiency is a crucial factor to be incorporated into future generation manufacturing systems. In this study, energy consumption is considered in the distributed homogeneous flow shop scheduling problem (DHFSSP). A knowledge-driven memetic algorithm (KDMA) is proposed to address the energy-efficient DHFSSP (EEDHFSSP). KDMA incorporates a collaborative initialization strategy to generate high-quality initial populations. Furthermore, several algorithmic improvements including update strategy, local search strategy, and carbon reduction strategy are employed to improve the search performance of the algorithm. The effectiveness of KDMA in solving EEDHFSSP is verified through extensive simulation experiments. It is evident that KDMA outperforms many state-of-the-art algorithms across various evaluation aspects.
Reinforcement Learning-assisted Evolutionary Algorithm: A Survey and Research Opportunities
Aug 28, 2023


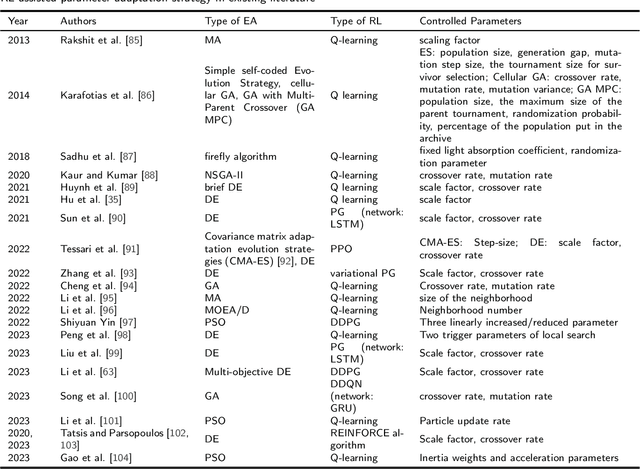
Evolutionary algorithms (EA), a class of stochastic search methods based on the principles of natural evolution, have received widespread acclaim for their exceptional performance in various real-world optimization problems. While researchers worldwide have proposed a wide variety of EAs, certain limitations remain, such as slow convergence speed and poor generalization capabilities. Consequently, numerous scholars actively explore improvements to algorithmic structures, operators, search patterns, etc., to enhance their optimization performance. Reinforcement learning (RL) integrated as a component in the EA framework has demonstrated superior performance in recent years. This paper presents a comprehensive survey on integrating reinforcement learning into the evolutionary algorithm, referred to as reinforcement learning-assisted evolutionary algorithm (RL-EA). We begin with the conceptual outlines of reinforcement learning and the evolutionary algorithm. We then provide a taxonomy of RL-EA. Subsequently, we discuss the RL-EA integration method, the RL-assisted strategy adopted by RL-EA, and its applications according to the existing literature. The RL-assisted procedure is divided according to the implemented functions including solution generation, learnable objective function, algorithm/operator/sub-population selection, parameter adaptation, and other strategies. Finally, we analyze potential directions for future research. This survey serves as a rich resource for researchers interested in RL-EA as it overviews the current state-of-the-art and highlights the associated challenges. By leveraging this survey, readers can swiftly gain insights into RL-EA to develop efficient algorithms, thereby fostering further advancements in this emerging field.
A Reinforcement Learning-assisted Genetic Programming Algorithm for Team Formation Problem Considering Person-Job Matching
Apr 08, 2023
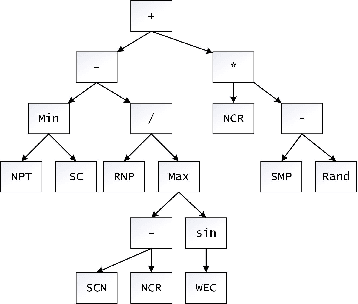
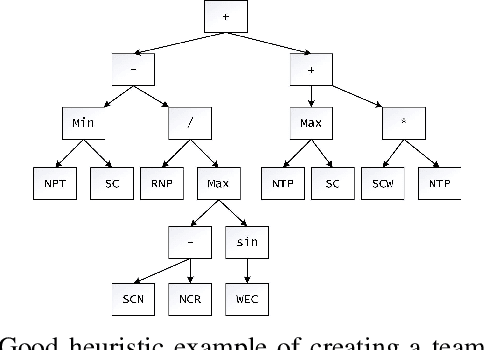
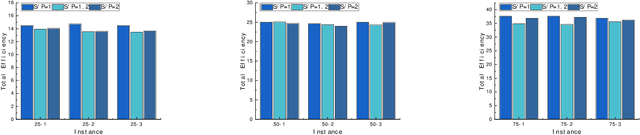
An efficient team is essential for the company to successfully complete new projects. To solve the team formation problem considering person-job matching (TFP-PJM), a 0-1 integer programming model is constructed, which considers both person-job matching and team members' willingness to communicate on team efficiency, with the person-job matching score calculated using intuitionistic fuzzy numbers. Then, a reinforcement learning-assisted genetic programming algorithm (RL-GP) is proposed to enhance the quality of solutions. The RL-GP adopts the ensemble population strategies. Before the population evolution at each generation, the agent selects one from four population search modes according to the information obtained, thus realizing a sound balance of exploration and exploitation. In addition, surrogate models are used in the algorithm to evaluate the formation plans generated by individuals, which speeds up the algorithm learning process. Afterward, a series of comparison experiments are conducted to verify the overall performance of RL-GP and the effectiveness of the improved strategies within the algorithm. The hyper-heuristic rules obtained through efficient learning can be utilized as decision-making aids when forming project teams. This study reveals the advantages of reinforcement learning methods, ensemble strategies, and the surrogate model applied to the GP framework. The diversity and intelligent selection of search patterns along with fast adaptation evaluation, are distinct features that enable RL-GP to be deployed in real-world enterprise environments.
Ensemble Reinforcement Learning: A Survey
Mar 05, 2023
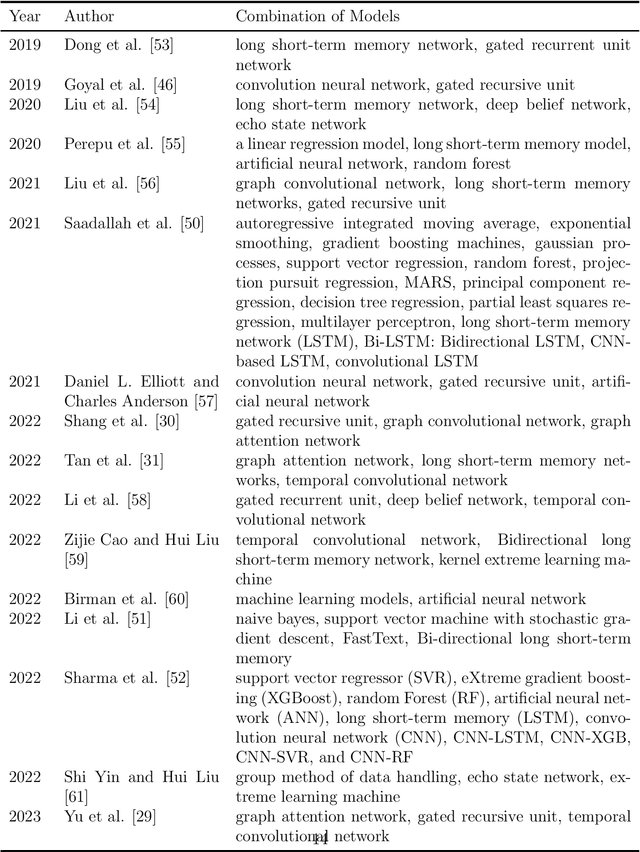
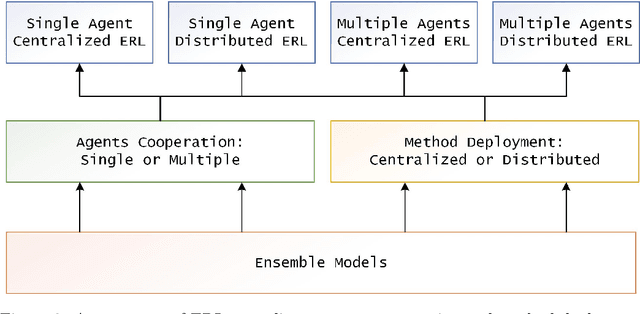
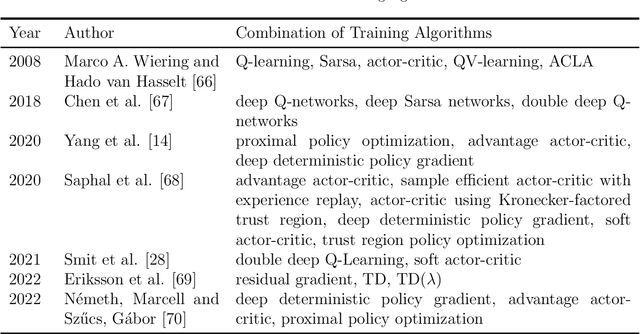
Reinforcement learning (RL) has achieved state-of-the-art performance in many scientific and applied problems. However, some complex tasks still are difficult to handle using a single model and algorithm. The highly popular ensemble reinforcement learning (ERL) has become an important method to handle complex tasks with the advantage of combining reinforcement learning and ensemble learning (EL). ERL combines several models or training algorithms to fully explore the problem space and has strong generalization characteristics. This study presents a comprehensive survey on ERL to provide the readers with an overview of the recent advances and challenges. The background is introduced first. The strategies successfully applied in ERL are analyzed in detail. Finally, we outline some open questions and conclude by discussing some future research directions of ERL. This survey contributes to ERL development by providing a guide for future scientific research and engineering applications.
LAGA: A Learning Adaptive Genetic Algorithm for Earth Electromagnetic Satellite Scheduling Problem
Jan 07, 2023Earth electromagnetic exploration satellites are widely used in many fields due to their wide detection range and high detection sensitivity. The complex environment and the proliferating number of satellites make management a primary issue. We propose a learning adaptive genetic algorithm (LAGA) for the earth electromagnetic satellite scheduling problem (EESSP). Control parameters are vital for evolutionary algorithms, and their sensitivity to the problem makes tuning parameters usually require a lot of effort. In the LAGA, we use a GRU artificial neural network model to control the parameters of variation operators. The GRU model can utilize online information to achieve adaptive adjustment of the parameters during population search. Moreover, a policy gradient-based reinforcement learning method is designed to update the GRU network parameters. By using an adaptive evolution mechanism in the algorithm, the LAGA can autonomously select crossover operators. Furthermore, a heuristic initialization method, an elite strategy, and a local search method are adopted in the LAGA to enhance the overall performance. The proposed algorithm can obtain a more optimal solution on the EESSP through sufficient experimental validations compared to the state-of-the-art algorithms.
A Tent Lévy Flying Sparrow Search Algorithm for Feature Selection: A COVID-19 Case Study
Sep 20, 2022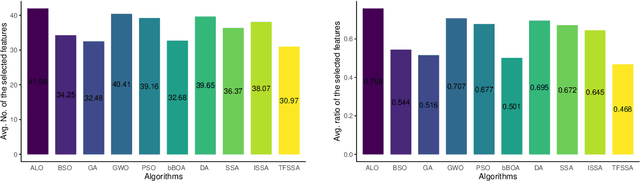
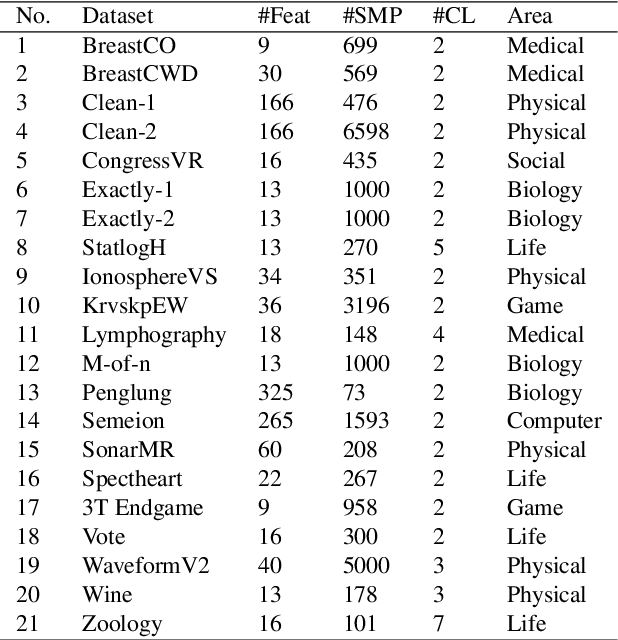

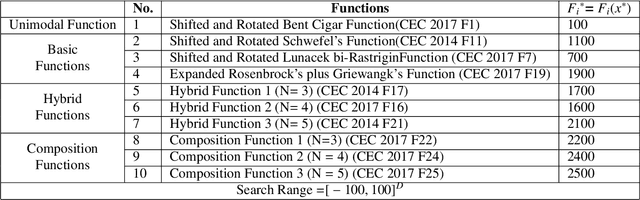
The "Curse of Dimensionality" induced by the rapid development of information science, might have a negative impact when dealing with big datasets. In this paper, we propose a variant of the sparrow search algorithm (SSA), called Tent L\'evy flying sparrow search algorithm (TFSSA), and use it to select the best subset of features in the packing pattern for classification purposes. SSA is a recently proposed algorithm that has not been systematically applied to feature selection problems. After verification by the CEC2020 benchmark function, TFSSA is used to select the best feature combination to maximize classification accuracy and minimize the number of selected features. The proposed TFSSA is compared with nine algorithms in the literature. Nine evaluation metrics are used to properly evaluate and compare the performance of these algorithms on twenty-one datasets from the UCI repository. Furthermore, the approach is applied to the coronavirus disease (COVID-19) dataset, yielding the best average classification accuracy and the average number of feature selections, respectively, of 93.47% and 2.1. Experimental results confirm the advantages of the proposed algorithm in improving classification accuracy and reducing the number of selected features compared to other wrapper-based algorithms.