 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAP: Segment Any 4K Panorama
Mar 13, 2026Promptable instance segmentation is widely adopted in embodied and AR systems, yet the performance of foundation models trained on perspective imagery often degrades on 360° panoramas. In this paper, we introduce Segment Any 4K Panorama (SAP), a foundation model for 4K high-resolution panoramic instance-level segmentation. We reformulate panoramic segmentation as fixed-trajectory perspective video segmentation, decomposing a panorama into overlapping perspective patches sampled along a continuous spherical traversal. This memory-aligned reformulation preserves native 4K resolution while restoring the smooth viewpoint transitions required for stable cross-view propagation. To enable large-scale supervision, we synthesize 183,440 4K-resolution panoramic images with instance segmentation labels using the InfiniGen engine. Trained under this trajectory-aligned paradigm, SAP generalizes effectively to real-world 360° images, achieving +17.2 zero-shot mIoU gain over vanilla SAM2 of different sizes on real-world 4K panorama benchmark.
EventVGGT: Exploring Cross-Modal Distillation for Consistent Event-based Depth Estimation
Mar 10, 2026Event cameras offer superior sensitivity to high-speed motion and extreme lighting, making event-based monocular depth estimation a promising approach for robust 3D perception in challenging conditions. However, progress is severely hindered by the scarcity of dense depth annotations. While recent annotation-free approaches mitigate this by distilling knowledge from Vision Foundation Models (VFMs), a critical limitation persists: they process event streams as independent frames. By neglecting the inherent temporal continuity of event data, these methods fail to leverage the rich temporal priors encoded in VFMs, ultimately yielding temporally inconsistent and less accurate depth predictions. To address this, we introduce EventVGGT, a novel framework that explicitly models the event stream as a coherent video sequence. To the best of our knowledge, we are the first to distill spatio-temporal and multi-view geometric priors from the Visual Geometry Grounded Transformer (VGGT) into the event domain. We achieve this via a comprehensive tri-level distillation strategy: (i) Cross-Modal Feature Mixture (CMFM) bridges the modality gap at the output level by fusing RGB and event features to generate auxiliary depth predictions; (ii) Spatio-Temporal Feature Distillation (STFD) distills VGGT's powerful spatio-temporal representations at the feature level; and (iii) Temporal Consistency Distillation (TCD) enforces cross-frame coherence at the temporal level by aligning inter-frame depth changes. Extensive experiments demonstrate that EventVGGT consistently outperforms existing methods -- reducing the absolute mean depth error at 30m by over 53\% on EventScape (from 2.30 to 1.06) -- while exhibiting robust zero-shot generalization on the unseen DENSE and MVSEC datasets.
Any360D: Towards 360 Depth Anything with Unlabeled 360 Data and Möbius Spatial Augmentation
Jun 19, 2024



Recently, Depth Anything Model (DAM) - a type of depth foundation model - reveals impressive zero-shot capacity for diverse perspective images. Despite its success, it remains an open question regarding DAM's performance on 360 images that enjoy a large field-of-view (180x360) but suffer from spherical distortions. To this end, we establish, to our knowledge, the first benchmark that aims to 1) evaluate the performance of DAM on 360 images and 2) develop a powerful 360 DAM for the benefit of the community. For this, we conduct a large suite of experiments that consider the key properties of 360 images, e.g., different 360 representations, various spatial transformations, and diverse indoor and outdoor scenes. This way, our benchmark unveils some key findings, e.g., DAM is less effective for diverse 360 scenes and sensitive to spatial transformations. To address these challenges, we first collect a large-scale unlabeled dataset including diverse indoor and outdoor scenes. We then propose a semi-supervised learning (SSL) framework to learn a 360 DAM, dubbed Any360D. Under the umbrella of SSL, Any360D first learns a teacher model by fine-tuning DAM via metric depth supervision. Then, we train the student model by uncovering the potential of large-scale unlabeled data with pseudo labels from the teacher model. M\"obius transformation-based spatial augmentation (MTSA) is proposed to impose consistency regularization between the unlabeled data and spatially transformed ones. This subtly improves the student model's robustness to various spatial transformations even under severe distortions. Extensive experiments demonstrate that Any360D outperforms DAM and many prior data-specific models, e.g., PanoFormer, across diverse scenes, showing impressive zero-shot capacity for being a 360 depth foundation model.
CRF360D: Monocular 360 Depth Estimation via Spherical Fully-Connected CRFs
May 19, 2024



Monocular 360 depth estimation is challenging due to the inherent distortion of the equirectangular projection (ERP). This distortion causes a problem: spherical adjacent points are separated after being projected to the ERP plane, particularly in the polar regions. To tackle this problem, recent methods calculate the spherical neighbors in the tangent domain. However, as the tangent patch and sphere only have one common point, these methods construct neighboring spherical relationships around the common point. In this paper, we propose spherical fully-connected CRFs (SF-CRFs). We begin by evenly partitioning an ERP image with regular windows, where windows at the equator involve broader spherical neighbors than those at the poles. To improve the spherical relationships, our SF-CRFs enjoy two key components. Firstly, to involve sufficient spherical neighbors, we propose a Spherical Window Transform (SWT) module. This module aims to replicate the equator window's spherical relationships to all other windows, leveraging the rotational invariance of the sphere. Remarkably, the transformation process is highly efficient, completing the transformation of all windows in a 512X1024 ERP with 0.038 seconds on CPU. Secondly, we propose a Planar-Spherical Interaction (PSI) module to facilitate the relationships between regular and transformed windows, which not only preserves the local details but also captures global structures. By building a decoder based on the SF-CRFs blocks, we propose CRF360D, a novel 360 depth estimation framework that achieves state-of-the-art performance across diverse datasets. Our CRF360D is compatible with different perspective image-trained backbones (e.g., EfficientNet), serving as the encoder.
Learning High-Quality Navigation and Zooming on Omnidirectional Images in Virtual Reality
May 01, 2024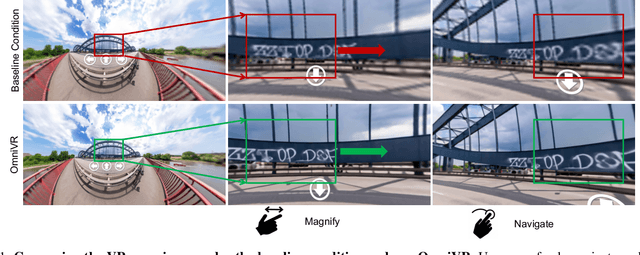
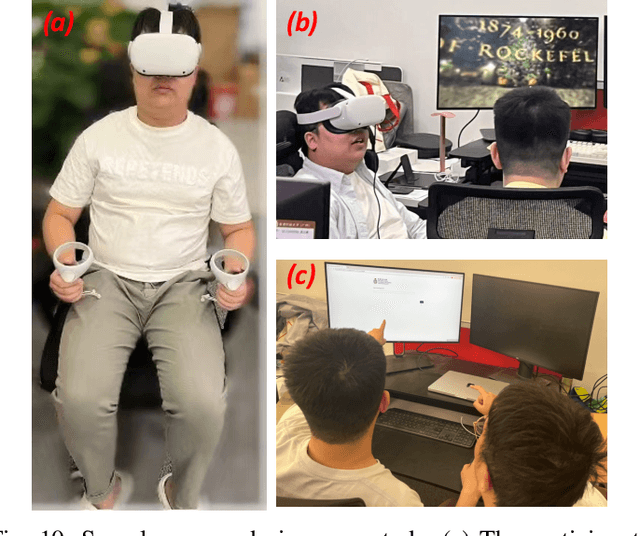
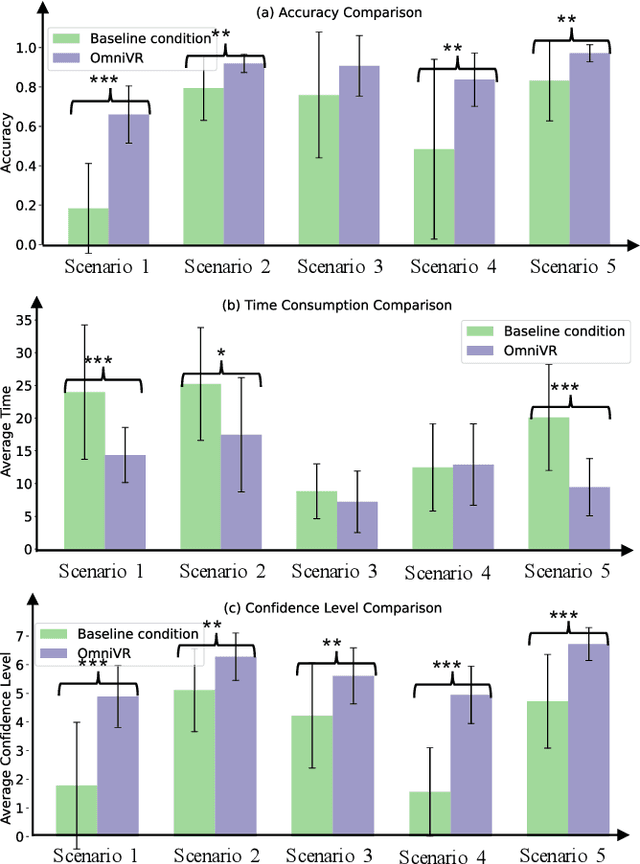
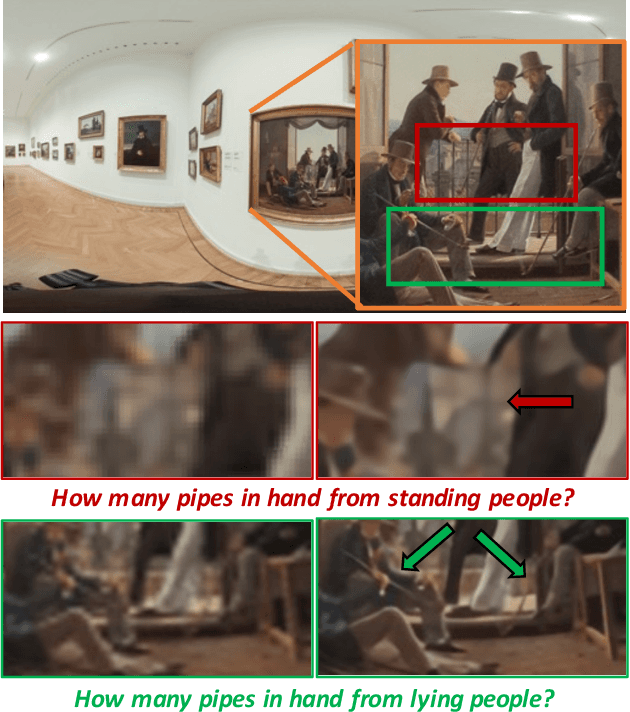
Viewing omnidirectional images (ODIs) in virtual reality (VR) represents a novel form of media that provides immersive experiences for users to navigate and interact with digital content. Nonetheless, this sense of immersion can be greatly compromised by a blur effect that masks details and hampers the user's ability to engage with objects of interest. In this paper, we present a novel system, called OmniVR, designed to enhance visual clarity during VR navigation. Our system enables users to effortlessly locate and zoom in on the objects of interest in VR. It captures user commands for navigation and zoom, converting these inputs into parameters for the Mobius transformation matrix. Leveraging these parameters, the ODI is refined using a learning-based algorithm. The resultant ODI is presented within the VR media, effectively reducing blur and increasing user engagement. To verify the effectiveness of our system, we first evaluate our algorithm with state-of-the-art methods on public datasets, which achieves the best performance. Furthermore, we undertake a comprehensive user study to evaluate viewer experiences across diverse scenarios and to gather their qualitative feedback from multiple perspectives. The outcomes reveal that our system enhances user engagement by improving the viewers' recognition, reducing discomfort, and improving the overall immersive experience. Our system makes the navigation and zoom more user-friendly.
Dream360: Diverse and Immersive Outdoor Virtual Scene Creation via Transformer-Based 360 Image Outpainting
Jan 19, 2024



360 images, with a field-of-view (FoV) of 180x360, provide immersive and realistic environments for emerging virtual reality (VR) applications, such as virtual tourism, where users desire to create diverse panoramic scenes from a narrow FoV photo they take from a viewpoint via portable devices. It thus brings us to a technical challenge: `How to allow the users to freely create diverse and immersive virtual scenes from a narrow FoV image with a specified viewport?' To this end, we propose a transformer-based 360 image outpainting framework called Dream360, which can generate diverse, high-fidelity, and high-resolution panoramas from user-selected viewports, considering the spherical properties of 360 images. Compared with existing methods, e.g., [3], which primarily focus on inputs with rectangular masks and central locations while overlooking the spherical property of 360 images, our Dream360 offers higher outpainting flexibility and fidelity based on the spherical representation. Dream360 comprises two key learning stages: (I) codebook-based panorama outpainting via Spherical-VQGAN (S-VQGAN), and (II) frequency-aware refinement with a novel frequency-aware consistency loss. Specifically, S-VQGAN learns a sphere-specific codebook from spherical harmonic (SH) values, providing a better representation of spherical data distribution for scene modeling. The frequency-aware refinement matches the resolution and further improves the semantic consistency and visual fidelity of the generated results. Our Dream360 achieves significantly lower Frechet Inception Distance (FID) scores and better visual fidelity than existing methods. We also conducted a user study involving 15 participants to interactively evaluate the quality of the generated results in VR, demonstrating the flexibility and superiority of our Dream360 framework.
Hi-Map: Hierarchical Factorized Radiance Field for High-Fidelity Monocular Dense Mapping
Jan 06, 2024In this paper, we introduce Hi-Map, a novel monocular dense mapping approach based on Neural Radiance Field (NeRF). Hi-Map is exceptional in its capacity to achieve efficient and high-fidelity mapping using only posed RGB inputs. Our method eliminates the need for external depth priors derived from e.g., a depth estimation model. Our key idea is to represent the scene as a hierarchical feature grid that encodes the radiance and then factorizes it into feature planes and vectors. As such, the scene representation becomes simpler and more generalizable for fast and smooth convergence on new observations. This allows for efficient computation while alleviating noise patterns by reducing the complexity of the scene representation. Buttressed by the hierarchical factorized representation, we leverage the Sign Distance Field (SDF) as a proxy of rendering for inferring the volume density, demonstrating high mapping fidelity. Moreover, we introduce a dual-path encoding strategy to strengthen the photometric cues and further boost the mapping quality, especially for the distant and textureless regions. Extensive experiments demonstrate our method's superiority in geometric and textural accuracy over the state-of-the-art NeRF-based monocular mapping methods.
SRFNet: Monocular Depth Estimation with Fine-grained Structure via Spatial Reliability-oriented Fusion of Frames and Events
Sep 22, 2023Monocular depth estimation is a crucial task to measure distance relative to a camera, which is important for applications, such as robot navigation and self-driving. Traditional frame-based methods suffer from performance drops due to the limited dynamic range and motion blur. Therefore, recent works leverage novel event cameras to complement or guide the frame modality via frame-event feature fusion. However, event streams exhibit spatial sparsity, leaving some areas unperceived, especially in regions with marginal light changes. Therefore, direct fusion methods, e.g., RAMNet, often ignore the contribution of the most confident regions of each modality. This leads to structural ambiguity in the modality fusion process, thus degrading the depth estimation performance. In this paper, we propose a novel Spatial Reliability-oriented Fusion Network (SRFNet), that can estimate depth with fine-grained structure at both daytime and nighttime. Our method consists of two key technical components. Firstly, we propose an attention-based interactive fusion (AIF) module that applies spatial priors of events and frames as the initial masks and learns the consensus regions to guide the inter-modal feature fusion. The fused feature are then fed back to enhance the frame and event feature learning. Meanwhile, it utilizes an output head to generate a fused mask, which is iteratively updated for learning consensual spatial priors. Secondly, we propose the Reliability-oriented Depth Refinement (RDR) module to estimate dense depth with the fine-grained structure based on the fused features and masks. We evaluate the effectiveness of our method on the synthetic and real-world datasets, which shows that, even without pretraining, our method outperforms the prior methods, e.g., RAMNet, especially in night scenes. Our project homepage: https://vlislab22.github.io/SRFNet.
OmniZoomer: Learning to Move and Zoom in on Sphere at High-Resolution
Aug 19, 2023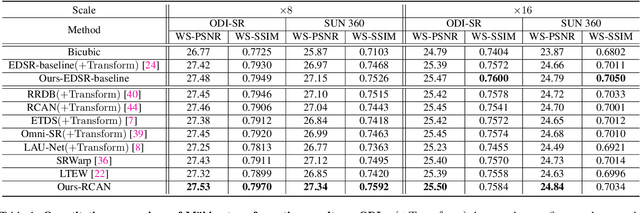
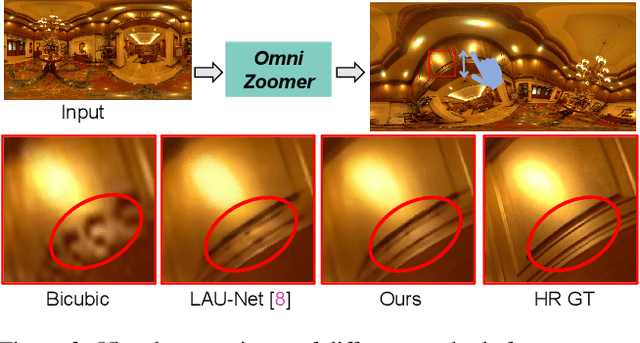
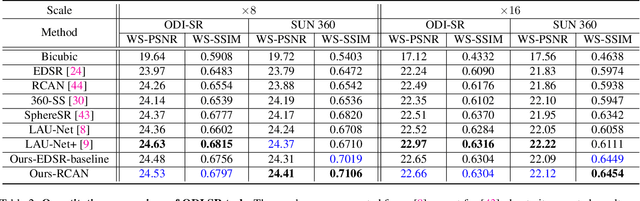
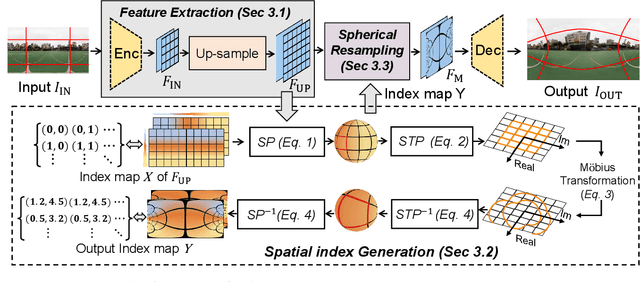
Omnidirectional images (ODIs) have become increasingly popular, as their large field-of-view (FoV) can offer viewers the chance to freely choose the view directions in immersive environments such as virtual reality. The M\"obius transformation is typically employed to further provide the opportunity for movement and zoom on ODIs, but applying it to the image level often results in blurry effect and aliasing problem. In this paper, we propose a novel deep learning-based approach, called \textbf{OmniZoomer}, to incorporate the M\"obius transformation into the network for movement and zoom on ODIs. By learning various transformed feature maps under different conditions, the network is enhanced to handle the increasing edge curvatures, which alleviates the blurry effect. Moreover, to address the aliasing problem, we propose two key components. Firstly, to compensate for the lack of pixels for describing curves, we enhance the feature maps in the high-resolution (HR) space and calculate the transformed index map with a spatial index generation module. Secondly, considering that ODIs are inherently represented in the spherical space, we propose a spherical resampling module that combines the index map and HR feature maps to transform the feature maps for better spherical correlation. The transformed feature maps are decoded to output a zoomed ODI. Experiments show that our method can produce HR and high-quality ODIs with the flexibility to move and zoom in to the object of interest. Project page is available at http://vlislab22.github.io/OmniZoomer/.
FMapping: Factorized Efficient Neural Field Mapping for Real-Time Dense RGB SLAM
Jun 01, 2023In this paper, we introduce FMapping, an efficient neural field mapping framework that facilitates the continuous estimation of a colorized point cloud map in real-time dense RGB SLAM. To achieve this challenging goal without depth, a hurdle is how to improve efficiency and reduce the mapping uncertainty of the RGB SLAM system. To this end, we first build up a theoretical analysis by decomposing the SLAM system into tracking and mapping parts, and the mapping uncertainty is explicitly defined within the frame of neural representations. Based on the analysis, we then propose an effective factorization scheme for scene representation and introduce a sliding window strategy to reduce the uncertainty for scene reconstruction. Specifically, we leverage the factorized neural field to decompose uncertainty into a lower-dimensional space, which enhances robustness to noise and improves training efficiency. We then propose the sliding window sampler to reduce uncertainty by incorporating coherent geometric cues from observed frames during map initialization to enhance convergence. Our factorized neural mapping approach enjoys some advantages, such as low memory consumption, more efficient computation, and fast convergence during map initialization. Experiments on two benchmark datasets show that our method can update the map of high-fidelity colorized point clouds around 2 seconds in real time while requiring no customized CUDA kernels. Additionally, it utilizes x20 fewer parameters than the most concise neural implicit mapping of prior methods for SLAM, e.g., iMAP [ 31] and around x1000 fewer parameters than the state-of-the-art approach, e.g., NICE-SLAM [ 42]. For more details, please refer to our project homepage: https://vlis2022.github.io/fmap/.