 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGS-Cache: A GS-Cache Inference Framework for Large-scale Gaussian Splatting Models
Feb 20, 2025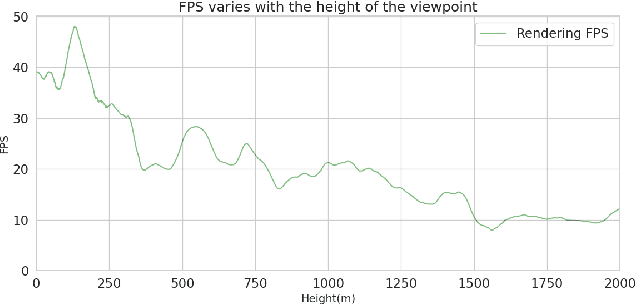
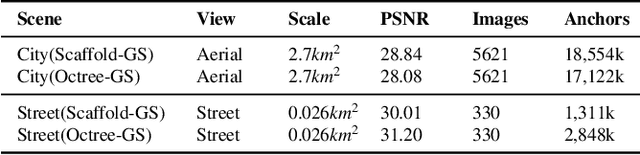
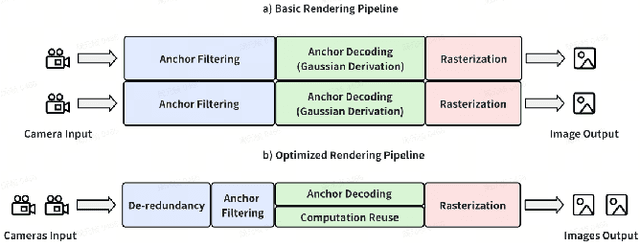
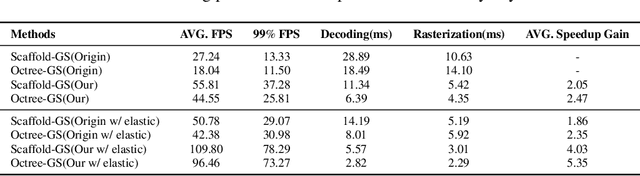
Rendering large-scale 3D Gaussian Splatting (3DGS) model faces significant challenges in achieving real-time, high-fidelity performance on consumer-grade devices. Fully realizing the potential of 3DGS in applications such as virtual reality (VR) requires addressing critical system-level challenges to support real-time, immersive experiences. We propose GS-Cache, an end-to-end framework that seamlessly integrates 3DGS's advanced representation with a highly optimized rendering system. GS-Cache introduces a cache-centric pipeline to eliminate redundant computations, an efficiency-aware scheduler for elastic multi-GPU rendering, and optimized CUDA kernels to overcome computational bottlenecks. This synergy between 3DGS and system design enables GS-Cache to achieve up to 5.35x performance improvement, 35% latency reduction, and 42% lower GPU memory usage, supporting 2K binocular rendering at over 120 FPS with high visual quality. By bridging the gap between 3DGS's representation power and the demands of VR systems, GS-Cache establishes a scalable and efficient framework for real-time neural rendering in immersive environments.
Towards Efficient Pre-training: Exploring FP4 Precision in Large Language Models
Feb 17, 2025The burgeoning computational demands for training large language models (LLMs) necessitate efficient methods, including quantized training, which leverages low-bit arithmetic operations to reduce costs. While FP8 precision has shown potential, leveraging FP4 remains challenging due to inherent quantization errors and limited representation capability. Based on the Transformer architecture, we present an FP4 training scheme for LLMs, overcoming these obstacles through mixed-precision quantization strategies tailed for different modules and training stages. This allows us to apply the precision level suitable to distinct components within the model, ensuring that multi-head attention and linear layers are handled appropriately. Our pretraining recipe ensures stability in backpropagation by incorporating fine-grained quantization methods with a target precision training schedule. Experimental results demonstrate that our FP4 training scheme achieves accuracy comparable to BF16 and FP8, with smaller theoretical computational cost. With the advent of next-generation hardware supporting FP4, our method sets the foundation for efficient ultra-low precision training.
Fisheye-GS: Lightweight and Extensible Gaussian Splatting Module for Fisheye Cameras
Sep 11, 2024Recently, 3D Gaussian Splatting (3DGS) has garnered attention for its high fidelity and real-time rendering. However, adapting 3DGS to different camera models, particularly fisheye lenses, poses challenges due to the unique 3D to 2D projection calculation. Additionally, there are inefficiencies in the tile-based splatting, especially for the extreme curvature and wide field of view of fisheye lenses, which are crucial for its broader real-life applications. To tackle these challenges, we introduce Fisheye-GS.This innovative method recalculates the projection transformation and its gradients for fisheye cameras. Our approach can be seamlessly integrated as a module into other efficient 3D rendering methods, emphasizing its extensibility, lightweight nature, and modular design. Since we only modified the projection component, it can also be easily adapted for use with different camera models. Compared to methods that train after undistortion, our approach demonstrates a clear improvement in visual quality.
PackMamba: Efficient Processing of Variable-Length Sequences in Mamba training
Aug 07, 2024



With the evolution of large language models, traditional Transformer models become computationally demanding for lengthy sequences due to the quadratic growth in computation with respect to the sequence length. Mamba, emerging as a groundbreaking architecture in the field of generative AI, demonstrates remarkable proficiency in handling elongated sequences with reduced computational and memory complexity. Nevertheless, the existing training framework of Mamba presents inefficiency with variable-length sequence inputs. Either single-sequence training results in low GPU utilization, or batched processing of variable-length sequences to a maximum length incurs considerable memory and computational overhead. To address this problem, we analyze the performance of bottleneck operators in Mamba under diverse tensor shapes and proposed PackMamba, a high-throughput Mamba that efficiently handles variable-length sequences. Diving deep into state-space models (SSMs), we modify the parallel operators to avoid passing information between individual sequences while maintaining high performance. Experimental results on an NVIDIA A100 GPU demonstrate throughput exceeding the baseline single-sequence processing scheme: 3.06x speedup on the 1.4B model and 2.62x on the 2.8B model.
A Novel Perception Entropy Metric for Optimizing Vehicle Perception with LiDAR Deployment
Jul 25, 2024



Developing an effective evaluation metric is crucial for accurately and swiftly measuring LiDAR perception performance. One major issue is the lack of metrics that can simultaneously generate fast and accurate evaluations based on either object detection or point cloud data. In this study, we propose a novel LiDAR perception entropy metric based on the probability of vehicle grid occupancy. This metric reflects the influence of point cloud distribution on vehicle detection performance. Based on this, we also introduce a LiDAR deployment optimization model, which is solved using a differential evolution-based particle swarm optimization algorithm. A comparative experiment demonstrated that the proposed PE-VGOP offers a correlation of more than 0.98 with vehicle detection ground truth in evaluating LiDAR perception performance. Furthermore, compared to the base deployment, field experiments indicate that the proposed optimization model can significantly enhance the perception capabilities of various types of LiDARs, including RS-16, RS-32, and RS-80. Notably, it achieves a 25% increase in detection Recall for the RS-32 LiDAR.