 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNewsTorch: A PyTorch-based Toolkit for Learner-oriented News Recommendation
Apr 16, 2026News recommender systems are devised to alleviate the information overload, attracting more and more researchers' attention in recent years. The lack of a dedicated learner-oriented news recommendation toolkit hinders the advancement of research in news recommendation. We propose a PyTorch-based news recommendation toolkit called NewsTorch, developed to support learners in acquiring both conceptual understanding and practical experience. This toolkit provides a modular, decoupled, and extensible framework with a learner-friendly GUI platform that supports dataset downloading and preprocessing. It also enables training, validation, and testing of state-of-the-art neural news recommendation models with standardized evaluation metrics, ensuring fair comparison and reproducible experiments. Our open-source toolkit is released on Github: https://github.com/whonor/NewsTorch.
Calibeating Made Simple
Mar 23, 2026We study calibeating, the problem of post-processing external forecasts online to minimize cumulative losses and match an informativeness-based benchmark. Unlike prior work, which analyzed calibeating for specific losses with specific arguments, we reduce calibeating to existing online learning techniques and obtain results for general proper losses. More concretely, we first show that calibeating is minimax-equivalent to regret minimization. This recovers the $O(\log T)$ calibeating rate of Foster and Hart [FH23] for the Brier and log losses and its optimality, and yields new optimal calibeating rates for mixable losses and general bounded losses. Second, we prove that multi-calibeating is minimax-equivalent to the combination of calibeating and the classical expert problem. This yields new optimal multi-calibeating rates for mixable losses, including Brier and log losses, and general bounded losses. Finally, we obtain new bounds for achieving calibeating and calibration simultaneously for the Brier loss. For binary predictions, our result gives the first calibrated algorithm that at the same time also achieves the optimal $O(\log T)$ calibeating rate.
Ad Insertion in LLM-Generated Responses
Jan 27, 2026Sustainable monetization of Large Language Models (LLMs) remains a critical open challenge. Traditional search advertising, which relies on static keywords, fails to capture the fleeting, context-dependent user intents--the specific information, goods, or services a user seeks--embedded in conversational flows. Beyond the standard goal of social welfare maximization, effective LLM advertising imposes additional requirements on contextual coherence (ensuring ads align semantically with transient user intents) and computational efficiency (avoiding user interaction latency), as well as adherence to ethical and regulatory standards, including preserving privacy and ensuring explicit ad disclosure. Although various recent solutions have explored bidding on token-level and query-level, both categories of approaches generally fail to holistically satisfy this multifaceted set of constraints. We propose a practical framework that resolves these tensions through two decoupling strategies. First, we decouple ad insertion from response generation to ensure safety and explicit disclosure. Second, we decouple bidding from specific user queries by using ``genres'' (high-level semantic clusters) as a proxy. This allows advertisers to bid on stable categories rather than sensitive real-time response, reducing computational burden and privacy risks. We demonstrate that applying the VCG auction mechanism to this genre-based framework yields approximately dominant strategy incentive compatibility (DSIC) and individual rationality (IR), as well as approximately optimal social welfare, while maintaining high computational efficiency. Finally, we introduce an "LLM-as-a-Judge" metric to estimate contextual coherence. Our experiments show that this metric correlates strongly with human ratings (Spearman's $ρ\approx 0.66$), outperforming 80% of individual human evaluators.
Identification of Causal Direction under an Arbitrary Number of Latent Confounders
Oct 26, 2025Recovering causal structure in the presence of latent variables is an important but challenging task. While many methods have been proposed to handle it, most of them require strict and/or untestable assumptions on the causal structure. In real-world scenarios, observed variables may be affected by multiple latent variables simultaneously, which, generally speaking, cannot be handled by these methods. In this paper, we consider the linear, non-Gaussian case, and make use of the joint higher-order cumulant matrix of the observed variables constructed in a specific way. We show that, surprisingly, causal asymmetry between two observed variables can be directly seen from the rank deficiency properties of such higher-order cumulant matrices, even in the presence of an arbitrary number of latent confounders. Identifiability results are established, and the corresponding identification methods do not even involve iterative procedures. Experimental results demonstrate the effectiveness and asymptotic correctness of our proposed method.
RWKV-X: A Linear Complexity Hybrid Language Model
Apr 30, 2025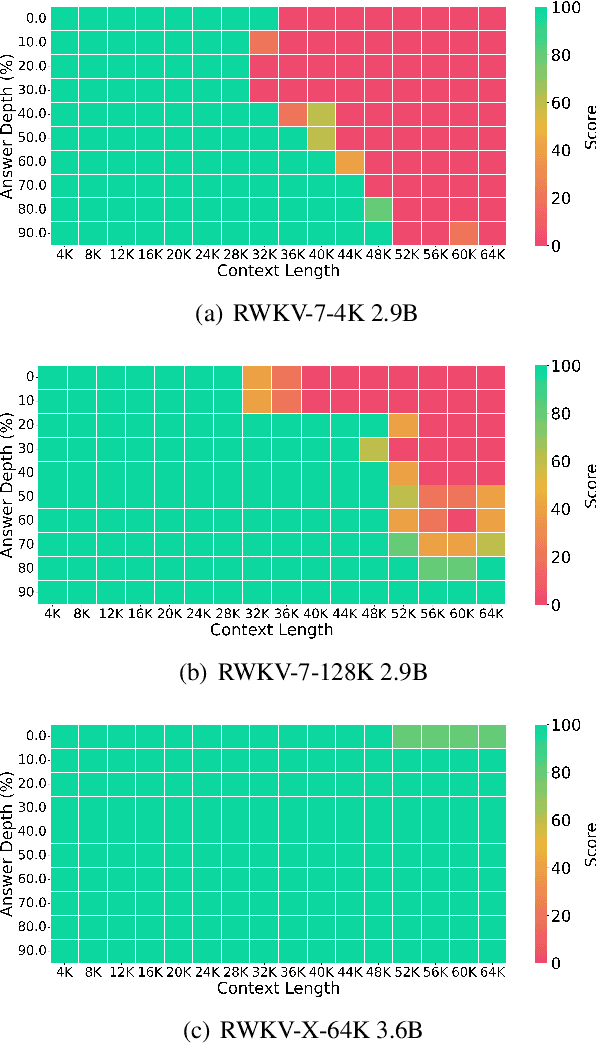
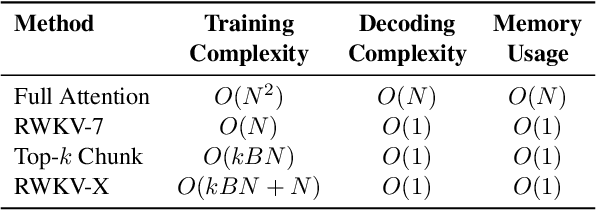
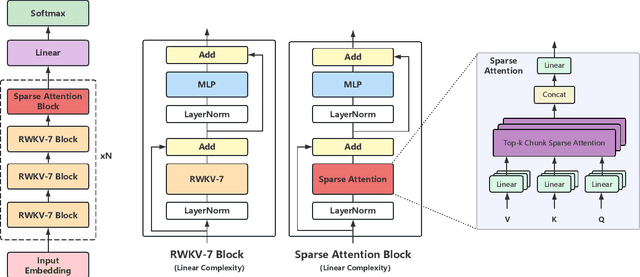
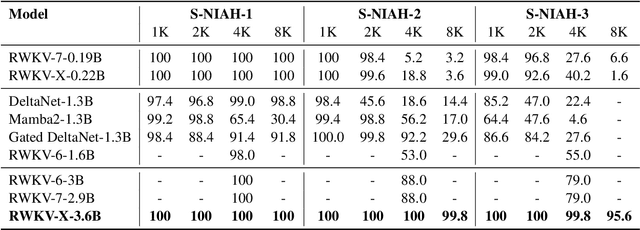
In this paper, we introduce \textbf{RWKV-X}, a novel hybrid architecture that combines the efficiency of RWKV for short-range modeling with a sparse attention mechanism designed to capture long-range context. Unlike previous hybrid approaches that rely on full attention layers and retain quadratic complexity, RWKV-X achieves linear-time complexity in training and constant-time complexity in inference decoding. We demonstrate that RWKV-X, when continually pretrained on 64K-token sequences, achieves near-perfect accuracy on the 64K passkey retrieval benchmark. It consistently outperforms prior RWKV-7 models on long-context benchmarks, while maintaining strong performance on short-context tasks. These results highlight RWKV-X as a scalable and efficient backbone for general-purpose language modeling, capable of decoding sequences up to 1 million tokens with stable speed and memory usage. To facilitate further research and analysis, we have made the checkpoints and the associated code publicly accessible at: https://github.com/howard-hou/RWKV-X.
Integrated Image-Text Based on Semi-supervised Learning for Small Sample Instance Segmentation
Oct 21, 2024



Small sample instance segmentation is a very challenging task, and many existing methods follow the training strategy of meta-learning which pre-train models on support set and fine-tune on query set. The pre-training phase, which is highly task related, requires a significant amount of additional training time and the selection of datasets with close proximity to ensure effectiveness. The article proposes a novel small sample instance segmentation solution from the perspective of maximizing the utilization of existing information without increasing annotation burden and training costs. The proposed method designs two modules to address the problems encountered in small sample instance segmentation. First, it helps the model fully utilize unlabeled data by learning to generate pseudo labels, increasing the number of available samples. Second, by integrating the features of text and image, more accurate classification results can be obtained. These two modules are suitable for box-free and box-dependent frameworks. In the way, the proposed method not only improves the performance of small sample instance segmentation, but also greatly reduce reliance on pre-training. We have conducted experiments in three datasets from different scenes: on land, underwater and under microscope. As evidenced by our experiments, integrated image-text corrects the confidence of classification, and pseudo labels help the model obtain preciser masks. All the results demonstrate the effectiveness and superiority of our method.
Are Bounded Contracts Learnable and Approximately Optimal?
Feb 22, 2024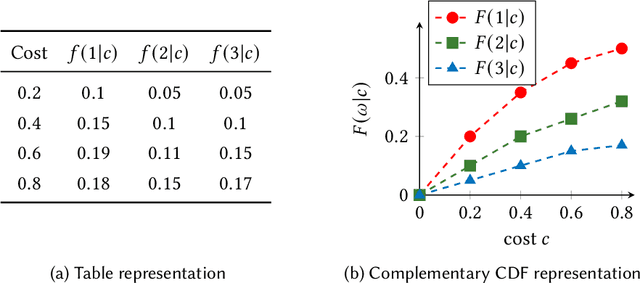
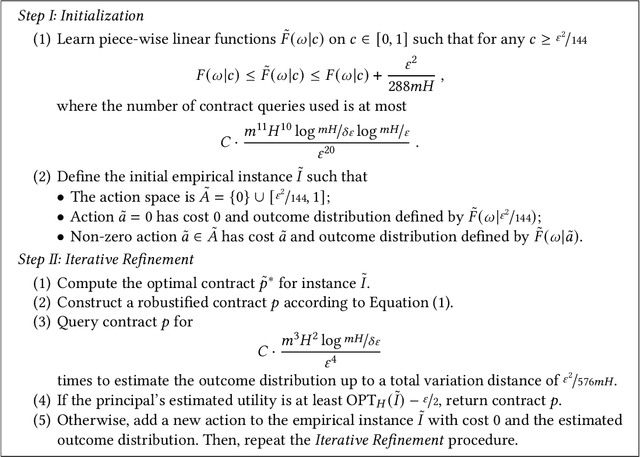
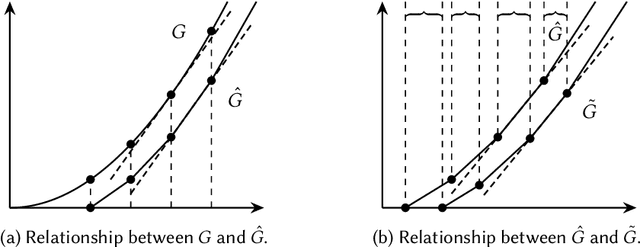
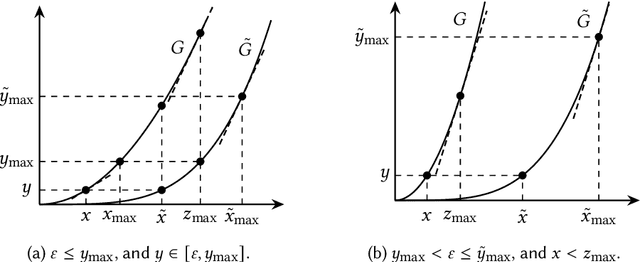
This paper considers the hidden-action model of the principal-agent problem, in which a principal incentivizes an agent to work on a project using a contract. We investigate whether contracts with bounded payments are learnable and approximately optimal. Our main results are two learning algorithms that can find a nearly optimal bounded contract using a polynomial number of queries, under two standard assumptions in the literature: a costlier action for the agent leads to a better outcome distribution for the principal, and the agent's cost/effort has diminishing returns. Our polynomial query complexity upper bound shows that standard assumptions are sufficient for achieving an exponential improvement upon the known lower bound for general instances. Unlike the existing algorithms, which relied on discretizing the contract space, our algorithms directly learn the underlying outcome distributions. As for the approximate optimality of bounded contracts, we find that they could be far from optimal in terms of multiplicative or additive approximation, but satisfy a notion of mixed approximation.
Identification of Causal Structure with Latent Variables Based on Higher Order Cumulants
Dec 19, 2023



Causal discovery with latent variables is a crucial but challenging task. Despite the emergence of numerous methods aimed at addressing this challenge, they are not fully identified to the structure that two observed variables are influenced by one latent variable and there might be a directed edge in between. Interestingly, we notice that this structure can be identified through the utilization of higher-order cumulants. By leveraging the higher-order cumulants of non-Gaussian data, we provide an analytical solution for estimating the causal coefficients or their ratios. With the estimated (ratios of) causal coefficients, we propose a novel approach to identify the existence of a causal edge between two observed variables subject to latent variable influence. In case when such a causal edge exits, we introduce an asymmetry criterion to determine the causal direction. The experimental results demonstrate the effectiveness of our proposed method.
Causal Discovery with Latent Confounders Based on Higher-Order Cumulants
May 31, 2023



Causal discovery with latent confounders is an important but challenging task in many scientific areas. Despite the success of some overcomplete independent component analysis (OICA) based methods in certain domains, they are computationally expensive and can easily get stuck into local optima. We notice that interestingly, by making use of higher-order cumulants, there exists a closed-form solution to OICA in specific cases, e.g., when the mixing procedure follows the One-Latent-Component structure. In light of the power of the closed-form solution to OICA corresponding to the One-Latent-Component structure, we formulate a way to estimate the mixing matrix using the higher-order cumulants, and further propose the testable One-Latent-Component condition to identify the latent variables and determine causal orders. By iteratively removing the share identified latent components, we successfully extend the results on the One-Latent-Component structure to the Multi-Latent-Component structure and finally provide a practical and asymptotically correct algorithm to learn the causal structure with latent variables. Experimental results illustrate the asymptotic correctness and effectiveness of the proposed method.
E2CoPre: Energy Efficient and Cooperative Collision Avoidance for UAV Swarms with Trajectory Prediction
Mar 11, 2023



This paper addresses the collision avoidance problem of UAV swarms in three-dimensional (3D) space. The key challenges are energy efficiency and cooperation of swarm members. We propose to combine Artificial Potential Field (APF) with Particle Swarm Planning (PSO). APF provides environmental awareness and implicit coordination to UAVs. PSO searches for the optimal trajectories for each UAV in terms of safety and energy efficiency by minimizing a fitness function. The fitness function exploits the advantages of the Active Contour Model in image processing for trajectory planning. Lastly, vehicle-to-vehicle collisions are detected in advance based on trajectory prediction and are resolved by cooperatively adjusting the altitude of UAVs. Simulation results demonstrate that our method can save up to 80\% of energy compared to state-of-the-art schemes.