 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeACDC: Adaptive Curriculum Planning with Dynamic Contrastive Control for Goal-Conditioned Reinforcement Learning in Robotic Manipulation
Mar 02, 2026Goal-conditioned reinforcement learning has shown considerable potential in robotic manipulation; however, existing approaches remain limited by their reliance on prioritizing collected experience, resulting in suboptimal performance across diverse tasks. Inspired by human learning behaviors, we propose a more comprehensive learning paradigm, ACDC, which integrates multidimensional Adaptive Curriculum (AC) Planning with Dynamic Contrastive (DC) Control to guide the agent along a well-designed learning trajectory. More specifically, at the planning level, the AC component schedules the learning curriculum by dynamically balancing diversity-driven exploration and quality-driven exploitation based on the agent's success rate and training progress. At the control level, the DC component implements the curriculum plan through norm-constrained contrastive learning, enabling magnitude-guided experience selection aligned with the current curriculum focus. Extensive experiments on challenging robotic manipulation tasks demonstrate that ACDC consistently outperforms the state-of-the-art baselines in both sample efficiency and final task success rate.
E2CoPre: Energy Efficient and Cooperative Collision Avoidance for UAV Swarms with Trajectory Prediction
Mar 11, 2023



This paper addresses the collision avoidance problem of UAV swarms in three-dimensional (3D) space. The key challenges are energy efficiency and cooperation of swarm members. We propose to combine Artificial Potential Field (APF) with Particle Swarm Planning (PSO). APF provides environmental awareness and implicit coordination to UAVs. PSO searches for the optimal trajectories for each UAV in terms of safety and energy efficiency by minimizing a fitness function. The fitness function exploits the advantages of the Active Contour Model in image processing for trajectory planning. Lastly, vehicle-to-vehicle collisions are detected in advance based on trajectory prediction and are resolved by cooperatively adjusting the altitude of UAVs. Simulation results demonstrate that our method can save up to 80\% of energy compared to state-of-the-art schemes.
Multi-UAV Collision Avoidance using Multi-Agent Reinforcement Learning with Counterfactual Credit Assignment
Apr 19, 2022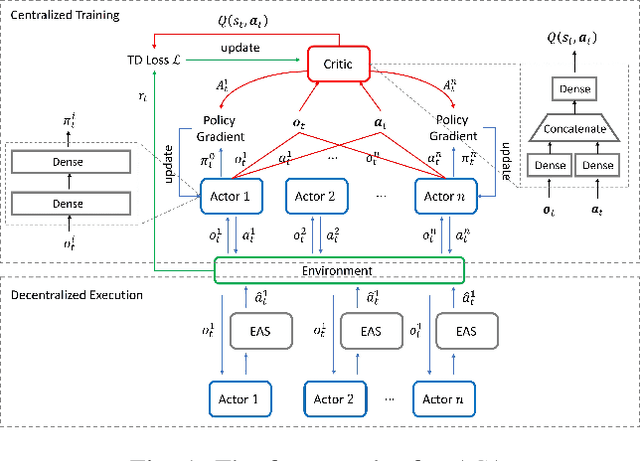
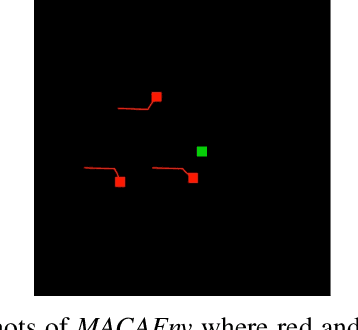
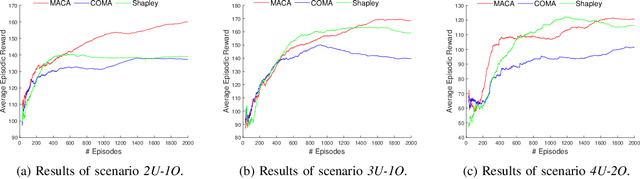
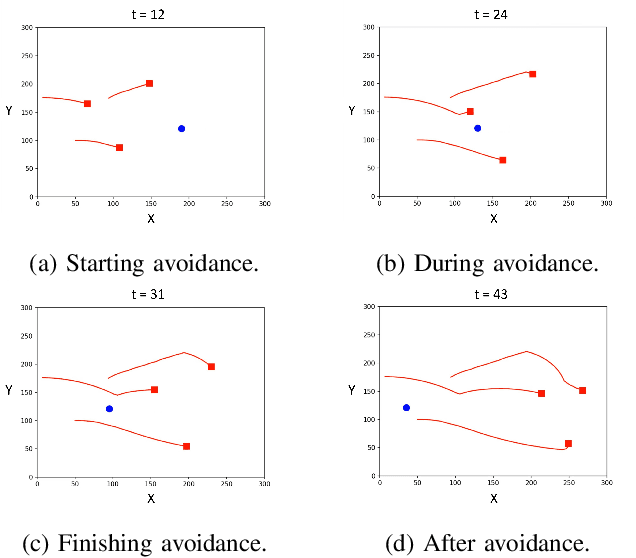
Multi-UAV collision avoidance is a challenging task for UAV swarm applications due to the need of tight cooperation among swarm members for collision-free path planning. Centralized Training with Decentralized Execution (CTDE) in Multi-Agent Reinforcement Learning is a promising method for multi-UAV collision avoidance, in which the key challenge is to effectively learn decentralized policies that can maximize a global reward cooperatively. We propose a new multi-agent critic-actor learning scheme called MACA for UAV swarm collision avoidance. MACA uses a centralized critic to maximize the discounted global reward that considers both safety and energy efficiency, and an actor per UAV to find decentralized policies to avoid collisions. To solve the credit assignment problem in CTDE, we design a counterfactual baseline that marginalizes both an agent's state and action, enabling to evaluate the importance of an agent in the joint observation-action space. To train and evaluate MACA, we design our own simulation environment MACAEnv to closely mimic the realistic behaviors of a UAV swarm. Simulation results show that MACA achieves more than 16% higher average reward than two state-of-the-art MARL algorithms and reduces failure rate by 90% and response time by over 99% compared to a conventional UAV swarm collision avoidance algorithm in all test scenarios.
$E^2Coop$: Energy Efficient and Cooperative Obstacle Detection and Avoidance for UAV Swarms
May 08, 2021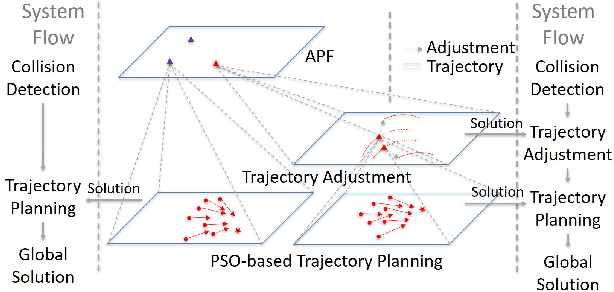
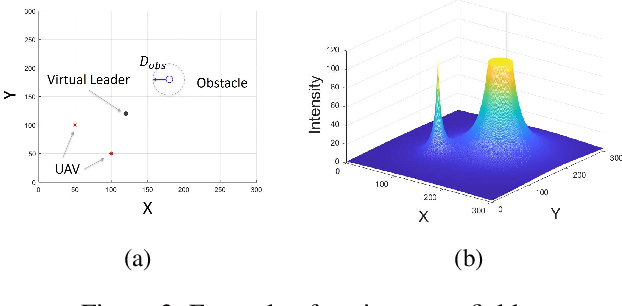
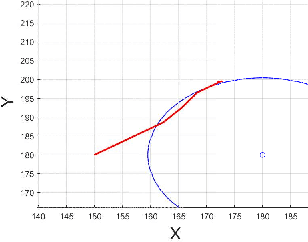
Energy efficiency is of critical importance to trajectory planning for UAV swarms in obstacle avoidance. In this paper, we present $E^2Coop$, a new scheme designed to avoid collisions for UAV swarms by tightly coupling Artificial Potential Field (APF) with Particle Swarm Planning (PSO) based trajectory planning. In $E^2Coop$, swarm members perform trajectory planning cooperatively to avoid collisions in an energy-efficient manner. $E^2Coop$ exploits the advantages of the active contour model in image processing for trajectory planning. Each swarm member plans its trajectories on the contours of the environment field to save energy and avoid collisions to obstacles. Swarm members that fall within the safeguard distance of each other plan their trajectories on different contours to avoid collisions with each other. Simulation results demonstrate that $E^2Coop$ can save energy up to 51\% compared with two state-of-the-art schemes.